技术特征:
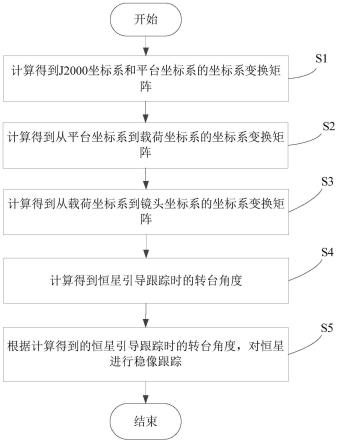
1.一种星上恒星目标跟踪方法,其特征在于,该方法包括如下步骤:a.通过星上平台的平台姿态参数计算得到j2000坐标系和平台坐标系的坐标系变换矩阵;b.计算得到从平台坐标系到载荷坐标系的坐标系变换矩阵;c.计算得到从载荷坐标系到镜头坐标系的坐标系变换矩阵;d.计算得到恒星引导跟踪时的转台角度;e.根据计算得到的恒星引导跟踪时的转台角度,对恒星进行稳像跟踪。2.如权利要求1所述的方法,其特征在于,所述方法在步骤a之前还包括步骤:星上平台收到下发的星上恒星跟踪指令。3.如权利要求2所述的方法,其特征在于,所述平台姿态参数包括:船上时、惯性姿态四元数、惯性姿态运动角速度。4.如权利要求3所述的方法,其特征在于,所述的步骤a具体包括如下步骤:步骤s11,计算t
a0
时刻从j2000坐标系到平台坐标系的坐标变换矩阵a(t
a0
);在船上时t
a0
时刻,对应平台惯性姿态四元数[q1,q2,q3,q4],因此,j2000到t
a0
时刻平台坐标系的坐标变换矩阵如下:步骤s12,计算时间间隔δt从j2000坐标系到平台坐标系姿态角增量对应的坐标变换矩阵b;在船上时t
a0
时刻对应的惯性姿态运动角速度矢量[ω
x0
,ω
y0
,ω
z0
],设δt是从起始时刻至计算采样时刻的时长,经历δt后旋转角速度β如下:计算旋转方向单位矢量r
a
:姿态角增量对应的坐标变换矩阵b求解步骤如下:δb=β
×
δtδt步骤s13,计算得到从t
a0
到t
a0
δt时刻j2000坐标系和平台坐标系的坐标变换矩阵m1:m1=a(t
a0
)
×
b。5.如权利要求4所述的方法,其特征在于,所述的步骤b具体包括:
通过地面处理获取的定标图像数据得到平台坐标系到载荷坐标系的坐标系变换矩阵m2,标定m2的步骤包括:步骤s21,载荷坐标系按照俯仰运动、方位运动后与镜头坐标系平行;因此将转台置于零位时认为镜头坐标系与载荷坐标系重合;将转台置于零位时对已知恒星成像,查找星表获取恒星在j2000坐标系下坐标;通过下传图像得到该恒星在镜头坐标系下坐标,计算从j2000到镜头坐标系的坐标变换矩阵m
z
;步骤s22,根据拍摄图像时的姿态广播数据,计算在载荷的曝光时刻,从j2000坐标系到平台坐标系的坐标变换矩阵m
at
;步骤s23,计算m2;m2=m
z
m
at
。6.如权利要求5所述的方法,其特征在于,所述的步骤c包括:设初始时刻转台角度为[e0,a0],从载荷坐标系到镜头坐标系的坐标变换矩阵m
g0
为:经过i段时间后,转台角度为[e
t
,a
t
],从载荷坐标系到镜头坐标系的坐标变换矩阵m
gt
为:其中,g
t
为理论像旋角速度,下传至地面,作为地面处理的辅助信息。7.如权利要求6所述的方法,其特征在于,所述的步骤d包括:步骤s41,设在曝光起始时刻t
a0
,转台角度为[e0,a0],从j2000坐标系到镜头坐标系的变换矩阵为:m
p0
=m
g0
m2a(t
a0
)上式中,m
g0
参数为转台角度[e0,a0],a(t
a0
)为t
a0
时刻j2000坐标系到平台坐标系变换矩阵;步骤s42,计算t
a0
δt时刻,从j2000坐标系到镜头坐标系的变换矩阵为:m
p
=m
gt
m2m1上式中,m
gt
参数为转台角度[e
t
,a
t
],m1为t
a0
δt时刻j2000坐标系到平台坐标变换矩阵;设可得
技术总结
本发明涉及一种星上恒星目标跟踪方法,包括:通过星上平台的平台姿态参数计算得到J2000坐标系和平台坐标系的坐标系变换矩阵;计算得到从平台坐标系到载荷坐标系的坐标系变换矩阵;计算得到从载荷坐标系到镜头坐标系的坐标系变换矩阵;计算得到恒星引导跟踪时的转台角度;根据计算得到的恒星引导跟踪时的转台角度,对恒星进行稳像跟踪。本发明能够使得恒星保持在望远镜视场范围内,实现恒星稳像的目的。目的。目的。
技术研发人员:张帆 王晓东 刘文光
受保护的技术使用者:中国科学院长春光学精密机械与物理研究所
技术研发日:2022.01.11
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。