技术特征:
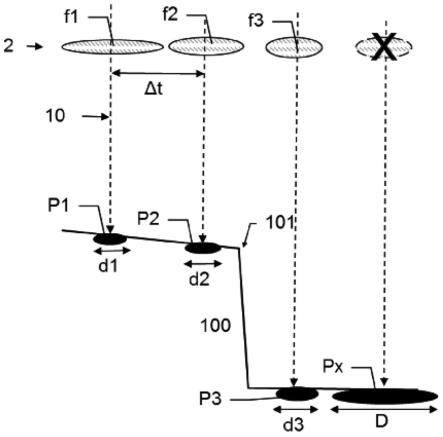
1.一种通过以每秒至少一千个对象点的测量速率来扫描测量对象表面以获取点云的光电测量装置(1),所述光电测量装置特别是激光扫描仪或激光跟踪仪,所述光电测量装置具有:基部(90)和瞄准单元(91),所述瞄准单元限定用于瞄准待测量对象(100)的瞄准轴线(94),所述瞄准单元(91)能够相对于所述基部(90)旋转,光源(4、4a),所述光源用于生成测量射束(10),出射孔(3),所述出射孔用于在所述瞄准轴线(94)的方向上朝向所述待测量对象的表面上的点(p、px、p1、p2、p3)发射作为自由射束并具有内部发射测量射束路径(9)的所述测量射束(10),其特征在于,高速自动聚焦光学模块(7),所述高速自动聚焦光学模块处于所述内部发射测量射束路径(9)中,所述高速自动聚焦光学模块(7)被设计用于在单个对象点测量周期内进行实时测量焦点调整,并且包括至少一个可变焦距透镜(2、2a)或可重构光学相位板,所述至少一个可变焦距透镜(2、2a)或所述可重构光学相位板具有1ms以下、特别是10us以下的响应时间。2.根据权利要求1所述的光电测量装置(1),其特征在于,所述实时焦点调整是测量射束焦点(f1、f2、f3、f1-f3)针对相应对象点(p、px、p1、p2、p3)的单独调整。3.根据权利要求1或2所述的光电测量装置(1),其特征在于,所述高速自动聚焦光学模块(7)包括至少一个准直透镜,而所述可变焦距透镜(2、2a)或所述可重构光学相位板位于所述准直透镜与所述光源(4、4a)的近场之间,特别是所述可变焦距透镜(2、2a)或所述可重构光学相位板正好处于所述光源(4、4a)的所述近场之后。4.根据前述权利要求中任一项所述的光电测量装置(1),其特征在于,所述高速自动聚焦光学模块(7)的焦度范围按照以下方式被调整到所述装置(1)的预定义最大测量范围,即通过所述焦距的变化能够贯穿整个测量范围实现所述实时焦点调整,特别地,
■
所述测量范围包括距离所述装置(1)的所述出射孔(3)低至1m的近范围(c),或
■
所述测量范围在1m至20m之间或1m至1000m之间。5.根据前述权利要求中任一项所述的光电测量装置(1),其特征在于,所述可变焦距透镜(2、2a)或所述可重构光学相位板具有至少从0m-1
直至10m-1
或从-6m-1
直至6m-1
或从-3m-1
直至10m-1
的焦度范围。6.根据前述权利要求中任一项所述的光电测量装置(1),其特征在于,所述测量射束(10)在所述出射孔处的直径(a)至少为6mm,特别是至少为10mm。7.根据前述权利要求中任一项所述的光电测量装置(1),
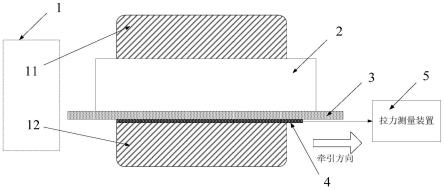
其特征在于,所述测量射束(10)在所述出射孔处的直径(a)与所述测量射束(10)在所述可变焦距透镜或所述可重构光学相位板的孔处的直径(l)的比率至少为2:1,优选是6:1。8.根据前述权利要求中任一项所述的光电测量装置(1),其特征在于,所述可变焦距透镜(2、2a)或所述可重构光学相位板的直径(l)是2mm,特别是最多6mm。9.根据前述权利要求中任一项所述的光电测量装置(1),其特征在于,所述可变焦距透镜(2、2a)包括可变形体(13),所述可变形体被限制在两个光学表面(12f、12b)内,所述两个光学表面能够通过机械地联接到所述可变形体(13)的至少一个压电元件致动器(14)变形,以便通过轴向对称弯曲或变形来改变透镜的焦距。10.根据前述权利要求中任一项所述的光电测量装置(1),其特征在于,接收器高速自动聚焦模块(7’),所述接收器高速自动聚焦模块被设计用于针对接收到的到所述光电测量装置(1)的接收检测器光学器件的光进行实时焦点调整,所述接收器高速自动聚焦模块(7’)与所述高速自动聚焦光学模块(7)同步操作,特别是其中,所述接收器自动聚焦单元(7’)按照以下方式根据对象距离(t)被控制:针对接收到的光的所述实时焦点调整仅对于比辐射测量限制距离更短的对象距离是有效的。11.一种基于三维光电光扫描对象表面的方法,所述方法特别是用于激光扫描仪或激光跟踪仪,所述方法使用发射到自由空间中的测量射束(10),在瞄准轴线(94)的方向上朝向待测量对象点(p、px、p1、p2、p3)以每秒至少一千个对象点的测量速率来测量对象点(p、px、p1、p2、p3),其特征在于,在单个对象点测量周期内,以至少1khz的频率,特别是以至少100khz的频率进行自动实时测量焦点调整。12.根据权利要求11所述的方法,其特征在于,所述实时焦点调整是基于到相应对象点(p、px、p1、p2、p3)的距离(tr)的,
■
所述距离(tr)是利用所述测量射束作为在测量相应对象点(p、px、p1、p2、p3)之前直接对该对象点(p、px、p1、p2、p3)进行的单独的先前探测测量进行测量的,或
■
所述距离(tr)是利用所述测量射束在相应对象点(p、px、p1、p2、p3)的测量中进行测量的,特别是其中,所述对象点(p、px、p1、p2、p3)是使用辐射脉冲(s、s1-s6)的序列来测量的,并且所述距离是使用所述序列的多个第一脉冲(s1)来确定的。13.根据权利要求11或12所述的方法,其特征在于,所述实时焦点调整是基于到相应对象点(p、px、p1、p2、p3)的距离的,所述距离:
■
被确定为基于先前距离或焦点趋势的预测值;和/或
■
是根据所述对象的预知数字表面模型来确定的。14.根据权利要求11至13中任一项所述的方法,
其特征在于,利用所述测量射束(10a-10c)的至少两个、特别是至少三个不同的焦点(f1-f3)来测量对象点(p),其中,针对每个焦点设定(f1-f3)得出到所述对象点(p)的距离(t)。15.一种计算机程序产品,所述计算机程序产品包括存储在机器可读介质上的程序代码,或由包括程序代码段的电磁波实施,并且具有计算机可执行指令,以用于特别是在根据权利要求1所述的光电测量装置(1)上运行时执行根据权利要求11至14中任一项所述的方法。
技术总结
本公开涉及具有点到点聚焦的扫描装置。一种以每秒至少一千个对象点(P、Px、P1、P2、P3)的测量速率来测量对象表面的方法和光电测量装置(1)。使用处于发射射束路径(9)中的高速自动聚焦光学模块,所述高速自动聚焦光学模块包括具有1ms以下的响应时间的至少一个可变焦距透镜(2、2a)或可重构光学相位板,在单个对象点测量周期内进行测量射束的实时焦点调整。量周期内进行测量射束的实时焦点调整。量周期内进行测量射束的实时焦点调整。
技术研发人员:J
受保护的技术使用者:赫克斯冈技术中心
技术研发日:2021.12.08
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。