1.本发明涉及矿山作业优化领域,尤其涉及一种面向实时配矿的多目标矿卡在线调度方法及系统。
背景技术:
2.露天矿开采工艺可以分为地质勘探、钻孔爆破、铲装运输、卸载破碎、选矿五个大的环节,五个环节环环相扣,前面四个环节的执行情况会对选矿结果产生直接的影响。如果进入破碎站的原金属矿品位波动较大,则难以控制进入选矿厂的金属矿品位和产量的稳定性。因此,在台阶爆破后矿石地质资源确定的条件下,如何通过缩少进入破碎站原金属矿的品位波动,从而保持金属精矿产量的稳定,提高精矿产品回收率变得至关重要。
3.作为主要运输设备的大型矿用卡车,其投资约占矿山总投资的40%-60%,运输成本约占矿石生产成本的30%-40%。加之矿山作业现场内设备购入时间的不同,矿卡型号也不完全一样,运输能力、油耗等参数也不一样,破碎站的下料口大小对不同类型矿卡的容纳数量也不相同,这也对调度方法提出了严苛的要求。在装载点铲装现场,矿石和废石交替产出,需要调度矿卡根据石头类型运往不同的卸载点,而现有调度方法只是针对单一类型的矿卡进行单一运输任务的调度,无法做到对不同类型的矿卡实现不同运输任务的调度。并且现有矿山企业存在配矿精度低导致选矿不充分造成矿石回收率低、卡铲排队导致运输效率低下、离线调度方案不能及时处理现场突发状况的问题。
4.此外,面向卡车、铲车调度现有的技术大多是基于离线调度的方式,在上班前生成矿卡调度方案,等矿卡司机上班后,按照调度方案执行。而在实际开采中存在众多不确定因素,当遇到突发状况时,矿卡得不到新的调度命令仍然按之前的离线调度方案执行,不能够解决目前的突发状况,造成有一辆矿卡没有按照调度方案执行,造成所有车辆的调度方案失效的局面。
5.上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现要素:
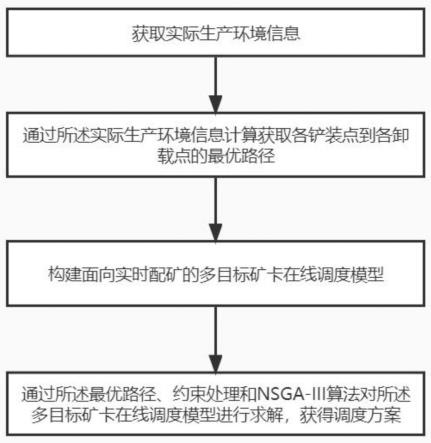
6.为解决上述技术问题,本发明提供一种面向实时配矿的多目标矿卡在线调度方法,包括:
7.s1:获取实际生产环境信息;
8.s2:通过所述实际生产环境信息计算获取各铲装点到各卸载点的最优路径;
9.s3:构建面向实时配矿的多目标矿卡在线调度模型;
10.s4:通过所述最优路径、约束处理和nsga-iii算法对所述多目标矿卡在线调度模型进行求解,获得调度方案。
11.优选的,步骤s1具体为:
12.s11:通过矿山的后台统计系统,获取铲装点数量、铲装点的位置、卸载点信息、不
同型号矿卡的数量、不同型号矿卡的载重量、不同型号矿卡的单位时间油耗量、道路相关信息和生产计划;
13.所述卸载点信息包括:矿石破碎站数量、矿石破碎站的位置、废石破碎站数量、废石破碎站的位置、排土场数量和排土场的位置;
14.s12:通过勘探数据,获取露天矿的地下三维品位分布信息;
15.s13:通过各矿卡的gps位置信息和速度信息,计算获得不同型号矿卡在不同路段的行程时间和矿卡所在位置。
16.优选的,步骤s3具体为:
17.s31:通过分析影响入选铜品位波动过大和矿卡运输效率低下的关键性因素,构建面向实时配矿的多目标矿卡在线调度模型;
18.s32:确定所述多目标矿卡在线调度模型需要优化的目标;
19.s33:确定所述多目标矿卡在线调度模型所满足的约束条件。
20.优选的,所述需要优化的目标包括:
21.第一优化目标,矿卡从铲装点到卸载点的三个往返之内等待时间f1(s)最小:
[0022][0023]
其中,p代表铲装点的编号,n代表铲装点的总数;q代表卸载点的编号,m代表卸载点的总数;r代表矿卡的编号,k代表矿卡的总数;表示第r号矿卡在p号铲装点的等待时间,代表第r号矿卡在q号的等待时间;
[0024]
第二优化目标,进入破碎站前后各矿卡所装载矿石品位的平均值与破碎站目标品位区间偏差f2(s)最小:
[0025][0026]
其中,u代表按到达破碎站的前后顺序进行排序后的矿卡编号,v代表求平均矿石品位的第一辆矿卡的编号,w代表到达破碎站的前后时间窗内求平均矿石品位的矿卡的总量;cu代表第u辆到达破碎站的矿卡所装载的矿石量;αu代表第u辆到达破碎站的矿卡所装载的矿石品位;q1代表破碎站的编号,代表q1号破碎站的目标矿石品位;
[0027]
第三优化目标,矿卡从铲装点到卸载点的三个往返之内能耗f3(s)最小:
[0028][0029]
其中,代表r号矿卡从p号铲装点到q号卸载点的重载油耗,代表r号矿卡从q号卸载点到p号铲装点的空载油耗,代表r号矿卡从p号铲装点到q号卸载点的次数,代表r号矿卡从q号卸载点到p号铲装点的次数。
[0030]
优选的,所述约束条件包括:
[0031]
第一约束条件,不同载重能力的矿卡只能去铲装能力相对应的铲装点:
[0032]
s.t.xr∈gr[0033]
其中,xr代表r号矿卡前往的下一处目的地,gr代表与矿卡装载能力对应的铲车所
在铲装点的集合;
[0034]
第二约束条件,铲装点当前出矿量大于该点规划待装载矿卡的总载重量:
[0035][0036]
其中,代表r号矿卡在p号铲装点装载的矿石量,d
p
代表p号铲装点当前的矿石储量;
[0037]
第三约束条件,单位时间内进入破碎站的矿石量小于等于破碎站额定破碎矿石量:
[0038][0039]
其中,代表到达q1号破碎站的r号矿卡所装载的矿石量,d
q1
代表q1号破碎站当前的料仓容积;
[0040]
第四约束条件,主干道路上矿卡之间的距离大于安全距离:
[0041][0042]
其中,g代表时刻,代表g时刻第r号矿卡的位置,代表g时刻与r号矿卡相邻矿卡的位置,l
safe
代表保证相邻两辆矿卡安全行驶的最小安全距离;
[0043]
第五约束条件,粉矿与块矿的配比约束:
[0044][0045]
其中,cu代表第u辆到达破碎站的矿卡所装载的矿石量,γu代表第u个到达破碎站的矿卡运输矿石中粉矿含量,代表q1号破碎站粉矿与块矿的配比要求;
[0046]
第六约束条件,破碎站料仓内高岭土含量小于20%:
[0047][0048]
其中,βu代表第u个到达破碎站的矿卡运输矿石中高岭土含量,代表q1号破碎站高岭土的含量要求;
[0049]
第七约束条件,铲车不停工:
[0050][0051]
其中,代表第r号矿卡出p号铲装点的时间,代表r号矿卡的后一辆矿卡出p号铲装点的时间;
[0052]
第八约束条件,未发生矿卡缺油、司机疲劳休息和破胎状况影响矿卡作业的中断事件:
[0053][0054]
其中,ir代表r号矿卡的状态。
[0055]
优选的,步骤s4具体为:
[0056]
s41:通过约束处理将求解所述多目标矿卡在线调度模型构造为求解四个优化目标的动态约束多目标优化问题;
[0057]
s42:根据矿卡调度的实际运行问题,通过所述最优路径对所述动态约束多目标优化问题的解的编码进行设计,获得调度方案染色体;
[0058]
s43:基于nsga-iii算法迭代求解所述动态约束多目标优化问题,将所述动态约束多目标优化问题的解通过所述调度方案染色体进行表示,输出调度方案。
[0059]
优选的,步骤s41具体为:
[0060]
s411:将待解参量x在所有约束上的约束违反的归一化平均度作为违约值目标,公式如下:
[0061][0062]
其中,h代表约束条件的个数,p0代表初始种群,gi(x)代表第i个约束条件下x违反约束的程度;
[0063]
s412:所述动态约束多目标优化问题的表达式为:
[0064][0065][0066][0067]
f4(x)=mincv(x)
[0068][0069][0070]
其中,ε
(t)
代表动态约束边界,t表示环境变化的次数,t表示环境变化的最大次数,满足θ(x)≤ε
(t)
的解称为ε可行解;否则,被称为ε不可行解。
[0071]
优选的,所述调度方案染色体x的表达式为:
[0072][0073]
其中,[abc]表示铲装点集合,a、b和c表示铲装点;[abc]表示破碎站集合,a、b和c表示破碎站;[aabbcc]表示矿卡的路线为a到a到b到b到c到c。
[0074]
优选的,步骤s43具体为:
[0075]
s431:对所述动态约束多目标优化问题,进行参数初始化及确定超平面上的参考点,参考点数量q计算公式如下:
[0076][0077]
其中,m表示目标向量的维数,h表示目标划分的份数;
[0078]
s432:构建所述多目标矿卡在线调度模型,获取初始种群p0;
[0079]
s433:通过nsga-iii算法,在形成父代种群p
t
之后,引入锦标赛选择机制从p
t
中挑选父代个体构建子代种群q
t
;
[0080]
s434:对所述p
t
、q
t
合并之后的种群r
t
进行非支配等级排序;
[0081]
s435:对r
t
进行自适应归一化、个体关联参考点以及小生境保存操作,经环境选择后将优势个体选择进入下一代种群p
t 1
;
[0082]
s436:重复步骤s433至s435,直至达到最大迭代次数后进入步骤s437;
[0083]
s437:计算获得折衷最优解,具体为:
[0084]
计算获得动态约束多目标优化问题的一组pareto解集,第i个pareto解的第j个目标值f
ij
的隶属函数h
ij
计算公式为:
[0085][0086]
其中,f
jmax
代表第j个目标函数的最大值,f
jmin
代表第j个目标函数的最小值;
[0087]
对于第i个pareto解,其标准化的隶属度函数hi的计算公式为:
[0088][0089]
其中,i为pareto解的总数;
[0090]
选择隶属度函数hi值最大的解为折衷最优解;
[0091]
s438:将折衷最优解对应的调度方案通过指令系统下发至矿卡;
[0092]
s439:重复步骤s432至s438,直至所有矿卡接收到的调度方案运行完毕。
[0093]
一种面向实时配矿的多目标矿卡在线调度系统,包括:
[0094]
实际生产环境信息获取模块,用于获取实际生产环境信息;
[0095]
最优路径计算模块,用于通过所述实际生产环境信息计算获取各铲装点到各卸载点的最优路径;
[0096]
多目标矿卡在线调度模型构建模块,用于构建面向实时配矿的多目标矿卡在线调度模型;
[0097]
调度方案生成模块,用于通过所述最优路径、约束处理和nsga-iii算法对所述多目标矿卡在线调度模型进行求解,获得调度方案。
[0098]
本发明具有以下有益效果:
[0099]
1、通过对建立的以运输能耗最小、入选金属矿石品位波动最小、矿卡等待时间最小的面向实时配矿的多目标矿卡在线调度模型进行求解,以解决不同型号矿卡混合运输矿石和废石难以进行统一在线调度的问题;
[0100]
2、在运输阶段通过控制车流进行实时配矿解决因入选金属矿品位波动大导致成品矿品位和产量波动大的问题,最直接的节约运输成本以提高矿企的经济效益,为智慧矿山和无人矿山建设提供技术支持。
附图说明
[0101]
图1为本发明实施例方法流程图;
[0102]
图2为露天金属矿矿区内路网示意图;
[0103]
图2中线条上的数字代表权值,圆圈内数字代表路网节点编号;
[0104]
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0105]
应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0106]
参照图1,本发明提供一种面向实时配矿的多目标矿卡在线调度方法,基于nsga-iii算法框架进行改进,根据问题特性对解的编码及局部搜索算子进行了设计,通过对建立的以运输能耗最小、入选金属矿石品位波动最小、矿卡等待时间最小的面向实时配矿的多目标矿卡在线调度模型进行求解,以解决不同型号矿卡混合运输矿石和废石难以进行统一在线调度的问题,在运输阶段通过控制车流进行实时配矿解决因入选金属矿品位波动大导致成品矿品位和产量波动大的问题,最直接的节约运输成本以提高矿企的经济效益,为智慧矿山和无人矿山建设提供技术支持;
[0107]
具体包括:
[0108]
s1:获取实际生产环境信息;
[0109]
s2:通过所述实际生产环境信息计算获取各铲装点到各卸载点的最优路径;
[0110]
具体的,最优路径的确定按照将司机根据路况驾驶矿卡行驶完该路径的历史用时平均值最小的路径设为最优路径;根据矿山路网信息,以司机在每段道路的行驶时间作为权重值,利用floyd算法计算出每个铲装点到每个破碎站的最优路径;
[0111]
s3:构建面向实时配矿的多目标矿卡在线调度模型;
[0112]
s4:通过所述最优路径、约束处理和nsga-iii算法对所述多目标矿卡在线调度模型进行求解,获得调度方案。
[0113]
本实施例中,步骤s1具体为:
[0114]
s11:通过矿山的后台统计系统,获取铲装点数量、铲装点的位置、卸载点信息、不同型号矿卡的数量、不同型号矿卡的载重量、不同型号矿卡的单位时间油耗量、道路相关信息(长度、宽度、坡度、摩擦系数、转弯次数)和生产计划;还包括车辆状况(单位时间内油耗、健康参数);
[0115]
所述卸载点信息包括:矿石破碎站数量、矿石破碎站的位置、废石破碎站数量、废石破碎站的位置、排土场数量和排土场的位置;
[0116]
s12:通过勘探数据,获取露天矿的地下三维品位分布信息;
[0117]
s13:通过各矿卡的gps位置信息和速度信息,计算获得不同型号矿卡在不同路段的行程时间和矿卡所在位置。
[0118]
本实施例中,步骤s3具体为:
[0119]
s31:通过分析影响入选铜品位波动过大和矿卡运输效率低下的关键性因素,构建面向实时配矿的多目标矿卡在线调度模型;
[0120]
具体的,以矿卡从铲装点到破碎站一个往返之内等待时间最小、进入破碎站前后几辆矿卡所装载矿石品位的平均值与破碎站目标品位区间偏差最小、矿卡从铲装点到破碎站一个往返之内能耗最小为目标,以采矿点的铲装能力、破碎站的破碎能力、采矿点待装矿卡数量、破碎站待卸载矿石量、进入铲装点的矿卡类型、破碎站料仓内矿石粉块比和高岭土含量为约束条件,建立面向实时配矿的多目标矿卡在线调度模型;
[0121]
s32:确定所述多目标矿卡在线调度模型需要优化的目标;
[0122]
s33:确定所述多目标矿卡在线调度模型所满足的约束条件。
[0123]
本实施例中,所述需要优化的目标包括:
[0124]
第一优化目标,矿卡从铲装点到卸载点的三个往返之内等待时间f1(s)最小:
[0125][0126]
其中,p代表铲装点的编号,n代表铲装点的总数;q代表卸载点的编号,m代表卸载点的总数;r代表矿卡的编号,k代表矿卡的总数;表示第r号矿卡在p号铲装点的等待时间,代表第r号矿卡在q号破碎站的等待时间;
[0127]
第二优化目标,进入破碎站前后各矿卡所装载矿石品位的平均值与破碎站目标品位区间偏差f2(s)最小:
[0128][0129]
其中,u代表按到达破碎站的前后顺序进行排序后的矿卡编号,v代表求平均矿石品位的第一辆矿卡的编号,w代表到达破碎站的前后时间窗内求平均矿石品位的矿卡的总量;cu代表第u辆到达破碎站的矿卡所装载的矿石量;αu代表第u辆到达破碎站的矿卡所装载的矿石品位;q1代表破碎站的编号,代表q1号破碎站的目标矿石品位;
[0130]
第三优化目标,矿卡从铲装点到卸载点的三个往返之内能耗f3(s)最小:
[0131][0132]
其中,代表r号矿卡从p号铲装点到q号卸载点的重载油耗,代表r号矿卡从q号卸载点到p号铲装点的空载油耗,代表r号矿卡从p号铲装点到q号卸载点的次数,代表r号矿卡从q号卸载点到p号铲装点的次数。
[0133]
本实施例中,所述约束条件包括:
[0134]
第一约束条件,不同载重能力的矿卡只能去铲装能力相对应的铲装点:
[0135]
s.t.xr∈grꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0136]
其中,xr代表r号矿卡前往的下一处目的地,gr代表与矿卡装载能力对应的铲车所在铲装点的集合;
[0137]
第二约束条件,铲装点当前出矿量大于该点规划待装载矿卡的总载重量:
[0138][0139]
其中,代表r号矿卡在p号铲装点装载的矿石量,d
p
代表p号铲装点当前的矿石储量;
[0140]
第三约束条件,单位时间内进入破碎站的矿石量小于等于破碎站额定破碎矿石量:
[0141][0142]
其中,代表到达q1号破碎站的r号矿卡所装载的矿石量,代表q1号破碎站当前的料仓容积;
[0143]
第四约束条件,主干道路上矿卡之间的距离大于安全距离:
[0144][0145]
其中,g代表时刻,代表g时刻第r号矿卡的位置,代表g时刻与r号矿卡相邻矿卡的位置,l
safe
代表保证相邻两辆矿卡安全行驶的最小安全距离;
[0146]
第五约束条件,粉矿与块矿的配比约束:
[0147][0148]
其中,cu代表第u辆到达破碎站的矿卡所装载的矿石量,γu代表第u个到达破碎站的矿卡运输矿石中粉矿含量,代表q1号破碎站粉矿与块矿的配比要求;
[0149]
第六约束条件,破碎站料仓内高岭土含量小于20%:
[0150][0151]
其中,βu代表第u个到达破碎站的矿卡运输矿石中高岭土含量,代表q1号破碎站高岭土的含量要求;
[0152]
第七约束条件,铲车不停工:
[0153][0154]
其中,代表第r号矿卡出p号铲装点的时间,代表r号矿卡的后一辆矿卡出p号铲装点的时间;
[0155]
第八约束条件,未发生矿卡缺油、司机疲劳休息和破胎状况影响矿卡作业的中断事件:
[0156][0157]
其中,ir代表r号矿卡的状态。
[0158]
本实施例中,步骤s4具体为:
[0159]
s41:通过约束处理将求解所述多目标矿卡在线调度模型构造为求解四个优化目标的动态约束多目标优化问题;
[0160]
s42:根据矿卡调度的实际运行问题,通过所述最优路径对所述动态约束多目标优化问题的解的编码进行设计,获得调度方案染色体;
[0161]
s43:基于nsga-iii算法迭代求解所述动态约束多目标优化问题,将所述动态约束多目标优化问题的解通过所述调度方案染色体进行表示,输出调度方案。
[0162]
本实施例中,步骤s41具体为:
[0163]
s411:该框架将违约值作为附加目标来将一个m目标约束优化问题:
[0164]
(f1(x),
…
,fm(x))转换成一个m 1目标约束优化问题(f1(x),
…
,fm(x),cv(x));
[0165]
将待解参量x在所有约束上的约束违反的归一化平均度作为违约值目标,公式如下:
[0166][0167]
其中,h代表约束条件的个数,p0代表初始种群,gi(x)代表第i个约束条件下x违反约束的程度;
[0168]
s412:所述动态约束多目标优化问题的表达式为:
[0169][0170][0171][0172]
f4(x)=mincv(x)
[0173][0174][0175]
其中,ε
(t)
代表动态约束边界,t表示环境变化的次数,t表示环境变化的最大次数,满足θ(x)≤ε
(t)
的解称为ε可行解;否则,被称为ε不可行解。
[0176]
参考图2,本实施例中,基于矿卡调度的实际运行问题,采用字符编码方式以简易准确地表达矿卡运行路线;铲装点和破碎站分别用大、小写字母表示,因此矿卡的运行路线由大、小写字母交替构成的字符串表示;如[abcde]表示表示铲装点集合,[abc]表示破碎站集合,[aabbccdaeb]表示一辆矿卡的运行路线(矿卡从铲装点a运行到破碎站a再运行到铲装点b以此类推)。同时记所有矿卡在固定时间段内的运行路线组合为一个解,因此所有矿卡的一种调度方案可以用一个解来表示,如矩阵x就表示一个解、一个调度方案,行数表示1#矿卡~n#矿卡,列数表示矿卡的目标点集合;
[0177]
所述调度方案染色体x的表达式为:
[0178][0179]
其中,[abc]表示铲装点集合,a、b和c表示铲装点;[abc]表示破碎站集合,a、b和c表示破碎站;[aabbcc]表示1#矿卡的路线为a到a到b到b到c到c。
[0180]
本实施例中,步骤s43具体为:
[0181]
s431:对所述动态约束多目标优化问题,进行参数初始化及确定超平面上的参考点,参数初始化包括设置种群规模大小,最大迭代次数,交叉概率,变异概率;参考点的数目取决于目标向量的维数m和将每个目标划分的份数h;
[0182]
参考点数量q计算公式如下:
[0183][0184]
其中,m表示目标向量的维数,h表示目标划分的份数;
[0185]
s432:构建所述多目标矿卡在线调度模型,获取初始种群p0;
[0186]
首次运行时,根据建立的面向实时配矿的多目标矿卡车在线调度模型,生成满足条件的初始种群p0。非首次运行时,根据所有车辆执行调度方案的情况生成该轮初始种群;
[0187]
s433:通过nsga-iii算法,在形成父代种群p
t
之后,引入锦标赛选择机制从p
t
中挑选父代个体构建子代种群q
t
;
[0188]
具体实现中,根据本问题特性,另设计如下七种搜索算子进行锦标赛选择,ls1-ls4为随机搜索算子,ls5-ls7为启发式搜索算子:
[0189]
ls1:随机选择一辆矿卡运输路线,然后从该路线中随机选择两组从铲装点到破碎站的序列并交换这两组运输序列;
[0190]
ls2:随机选择一辆矿卡运输路线,然后从该路线中随机选择两段从铲装点到破碎站的序列并交换这两段运输序列;
[0191]
ls3:随机选择两辆矿卡运输路线,然后从该路线中随机选择两组从铲装点到破碎站的序列并交换这两组运输序列;
[0192]
ls4:随机选择两辆矿卡运输路线,然后从该路线中随机选择两段从铲装点到破碎站的序列并交换这两段运输序列;
[0193]
ls5:从解决方案中找出等待时间最长的运输路线,选择矿卡运行路线中排队时间较长的装卸点组合,然后将所选装、卸点替换成使矿卡等待时间最短的装卸点;
[0194]
ls6从解决方案中找出能耗最高的运输路线,选择矿卡运行路线中能耗较高的装卸点组合,然后将所选装、卸点替换成使矿卡能耗最低装、卸点组合;
[0195]
ls7从解决方案中找出与目标品位偏差最大的相关运输路线,选择矿卡运行路线中品位偏差较高的一组路线(前后求平均品位的几辆车),然后将所选品位偏差较高的一组路线换成品位偏差最低的一组路线;
[0196]
s434:对所述p
t
、q
t
合并之后的种群r
t
进行非支配等级排序;
[0197]
具体的,为了从种群r
t
中选择当前代最优的n个解进入下一代的迭代过程,首先利用非支配排序法将r
t
分成几组不同等级的非支配层;然后,将从非支配层级1开始的解依次加到s
t
中,直到s
t
解的数目首次等于n或大于n;
[0198]
s435:对r
t
进行自适应归一化、个体关联参考点以及小生境保存操作,经环境选择后将优势个体选择进入下一代种群p
t 1
;
[0199]
具体的,自适应归一化的流程为:
[0200]
对建立的4个目标函数的最小值进行计算,假设在目标轴i上获取的对应最小值是并且集是nsga-iii算法中提到的理想点集,然后使用方程式(16)来转化目标函数值;
[0201][0202]
为了求出极值点,需要使用如式(17)所示的标量化函数(achievement sca-larizing function,asf);
[0203][0204]
其中,ei是目标轴fi的轴方向且满足如果i≠j,那么,e
i,j
=0;否则,e
i,j
=1,对于e
i,j
=0,则用很小的值10-6
来替代;遍历每个目标函数,找出具有最低asf值的个体,构成极值点。极值点和原点(理想点)组成三条线,三条线可以形成一个超平面,超平面与坐标轴之间的交点即为所求的截距,之后,通过方程(18)进行归一化。其中,是归一化后的目标函数值;
[0205][0206]
个体关联参考点的流程为:
[0207]
归一化后,个体需要与参考点相关联。使用由参考点和原点形成的线作为基准线,然后遍历所有参考线以找到与每个个体距离最近的参考线,并记录相应的参考点和最短距离,再计算出与每个参考点关联的个体数量;
[0208]
小生境保存操作的流程为:
[0209]
定义s
t 1
为包含了从非支配层级1到非支配层级l的种群中全部个体的集合,然后对每个参考点进行遍历,查看参考点被s
t 1
中除非支配层级l之外的个体引用的次数ρj;首先,确定是否有个体与这个参考点关联,如果没有则换一个参考点。如果存在参考点与之关联,则判断ρj;如果ρj=0,则选择非支配层级l到参考点j最小距离的解添加到p
t 1
;如果ρj》1,则将随机选择与非支配层级l参考点相关联的解添加到p
t 1
中;直到p
t 1
中的个体数目等于原种群的大小;
[0210]
s436:重复步骤s433至s435,直至达到最大迭代次数后进入步骤s437;
[0211]
s437:采用模糊决策方法从pareto解集中计算获得折衷最优解,具体为:
[0212]
计算获得动态约束多目标优化问题的一组pareto解集,第i个pareto解的第j个目标值f
ij
的隶属函数h
ij
计算公式为:
[0213][0214]
其中,f
jmax
代表第j个目标函数的最大值,f
jmin
代表第j个目标函数的最小值;
[0215]
对于第i个pareto解,其标准化的隶属度函数hi的计算公式为:
[0216][0217]
其中,i为pareto解的总数;
[0218]
选择隶属度函数hi值最大的解为折衷最优解;
[0219]
s438:将折衷最优解对应的调度方案通过指令系统下发至矿卡;
[0220]
s439:重复步骤s432至s438,直至所有矿卡累计运输量到达所设定运输目标。
[0221]
一种面向实时配矿的多目标矿卡在线调度系统,包括:
[0222]
实际生产环境信息获取模块,用于获取实际生产环境信息;
[0223]
最优路径计算模块,用于通过所述实际生产环境信息计算获取各铲装点到各卸载点的最优路径;
[0224]
多目标矿卡在线调度模型构建模块,用于构建面向实时配矿的多目标矿卡在线调度模型;
[0225]
调度方案生成模块,用于通过所述最优路径、约束处理和nsga-iii算法对所述多目标矿卡在线调度模型进行求解,获得调度方案。
[0226]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
[0227]
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。词语第一、第二、以及第三等的使用不表示任何顺序,可将这些词语解释为标识。
[0228]
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
