1.本发明基坑位移监测技术领域,具体而言,涉及一种高精度基坑位移监测方法及监测系统。
背景技术:
2.基坑监测是基坑工程施工中的一个重要环节,是指在基坑开挖及地下工程施工过程中,对基坑岩土形状、支护结构变为和周围环境变化进行各种观察及分析工作,并将监测结果及时反馈,预测进一步施工后将导致的变形及稳定状态的发展,根据预测判定施工对周围环境造成影响的程度,来指导设计与施工。由于基坑工程中岩土问题的不确定性、复杂性较强,基坑位移过大甚至垮塌的安全事故频发;当几十米深的基坑邻近建筑物、地铁、市政道路、地下管线时,更会对这些周边环境造成很大风险,一旦发生安全事故则会严重危及人民生命财产安全。因基坑失稳前支护结构位移和地面沉降等特征的状态是有预兆的,所以施工过程中对其进行监测是及时发现与控制基坑安全风险的有效方法。
3.目前,实际工程基坑位移监测还是以高精度全站仪和精密水准仪,对设置在支护结构与周边环境中的水平位移和沉降监测点进行人工测量的方法为主。
4.gnss(global navigation satellite system)技术广泛用于军用和民用方面,是发展最快的技术之一。gnss定位技术以其速度快,精度高,全天候,不受通视条件限制、操作简便可以向能接收到信号的用户提供定位服务,包括三维坐标、三维速度等;然而,目前商业化水平的gnss rtk(real time kinematic,rtk实时动态)载波相位差分技术,只能达到厘米级的精度,尚无法实现目前人工测量仪器毫米级的精度水平。
技术实现要素:
5.本发明解决的问题是如何能够实现高精度亚毫米级的基坑位移监测。为解决上述问题,本发明提供一种高精度基坑位移监测方法,包括如下步骤:
6.步骤1、将测量站布设在基坑的坑边,将基准站设在远离基坑、地势空旷且岩土稳定的区域;
7.步骤2、测量站和基准站按照采集策略分别接收卫星的卫星定位信号,分别解析为定位数据文件和基准定位数据文件,并将定位数据文件和基准定位数据文件传输给云端服务器;
8.步骤3、云端服务器先采用载波相位差分解算测量站与基准站之间的差分定位结果,将预设监测时间区间内的差分定位结果按照周期t分割成n个子时段,得到含n个子时段差分定位结果的差分定位集合k;
9.步骤4、连续记录m个监测时间区间的差分定位集合,根据每个监测时间区间同一时刻的卫星周期性和卫星信号质量构建差分矩阵d;
10.步骤5、将差分矩阵d向量化得到向量y;
11.步骤6、将向量y进行卡尔曼滤波得到基坑的位移检测结果x(n)。
12.本发明的有益效果是:采用将卫星的周期性波动信息应用到gps定位上,细化了定位监测的计算过程,将采集的数据进行分割得到n个子时段的差分定位结果,实现测量站和基准站相应子时段的定位数据文件进行解算,获得高精度基坑位移结果。
13.作为优选,所述步骤2中的采集策略为连续采集策略或周期采集策略或自适应采集策略,其中:
14.所述连续采集策略为:测量站和基准站连续监测和记录卫星定位信号,每小时定期传输给云端服务器;
15.所述周期采集策略为:预设基准站和测量站的唤醒时间和唤醒长度,基准站和测量站在唤醒时间启动,采集唤醒长度时长的定位数据文件和基准定位数据文件,并传输到云端服务器后,进入休眠状态;
16.所述自适应采集策略为:根据每日测量站的位移速率,当位移速率超过预设阀值是,测量站和基准站进入连续采集策略;当位移速率低于预设阀值时,进入周期采集策略。
17.作为优选,所述步骤3中差分定位集合k为:
18.k={l1,l2,...,ln}
[0019][0020]
式中,pos表示每个计时单位的差分定位结果,li表示对i个子时段内所有pos的平均值,即:
[0021]
所述预设监测时间区间为每天。
[0022]
作为优选,所述步骤4中m个监测时间区间的差分定位集合为:
[0023]
k1={l
11
,l
12
,
…
,l
1n
}
[0024]
k2={l
21
,l
22
,
…
,l
2n
}
[0025]
...
[0026]km
={l
m1
,l
m2
,
…
,l
mn
}
[0027]
构建的差分矩阵d为:
[0028][0029]
所述步骤5将差分矩阵d向量化得到向量y为:
[0030]
y=[d
2 d3ꢀ…ꢀdm
]=
[0031]
[d
21 d
22
ꢀ…ꢀd2n d
31 d
32
ꢀ…ꢀd3n d
m1 d
m2
ꢀ…ꢀdmn
];
[0032]
所述步骤6具体包括:
[0033]
步骤601、构建卡尔曼滤波模型:
[0034]
x(n)=ax(n-1) bw
[0035]
y(n)=cx(n) v
[0036]
式中,x(n)为卡尔曼滤波的输出值,y(n)为差分矩阵向量化后
的第n个测量值,w是均值为0且方差为p的白噪声,v是均值为0且方差为q的白噪声;a是状态转移矩阵,b是控制输入矩阵,c是状态观测去做,
[0037]
一种基于高精度基坑位移监测方法的高精度基坑位移监测系统高精度基坑位移监测系统,包括:
[0038]
测量站,布设在基坑的周边位置,用于接收卫星定位信号,并将其解析成为定位数据文件存储;
[0039]
基准站,设在远离基坑且岩土稳定的区域,用于接收卫星定位信号,并将其解析为基准定位数据文件存储;
[0040]
云端服务器,分别与基准站、测量站通信连接,定期接收基准站的基准定位数据文件和测量站的定位数据文件;并对定位数据文件和基准定位数据文件进行上述所述的基坑位移监测方法解算获得基坑位移结果。
附图说明
[0041]
图1为本发明具体实施例1的监测实验结果图;
[0042]
图2为本发明具体实施例1的实验测量误差图;
[0043]
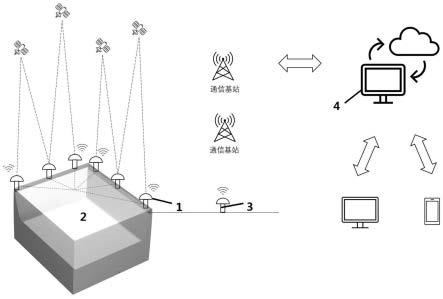
图3为本发明具体实施例2的系统结构图。
[0044]
附图标记说明:
[0045]
1、测量值;2、基坑;3、基准站;4、云端服务器。
具体实施方式
[0046]
为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
[0047]
具体实施例1
[0048]
一种高精度基坑位移监测方法,包括如下步骤:
[0049]
步骤1、将测量站布设在基坑的坑边,将基准站设在远离基坑、地势空旷且岩土稳定的区域;
[0050]
步骤2、测量站和基准站按照采集策略分别接收天空中开放的全球定位系统的卫星定位信号,例如gps和北斗,分别解析为定位数据文件和基准定位数据文件,并将定位数据文件和基准定位数据文件传输给云端服务器;
[0051]
步骤3、云端服务器先采用载波相位差分解算测量站与基准站之间的差分定位结果,将预设监测时间区间内的差分定位结果按照周期t分割成n个子时段,得到含n个子时段差分定位结果的差分定位集合k:
[0052]
k={l1,l2,...,ln}
[0053][0054]
式中,pos表示每个计时单位的差分定位结果,li表示对i个子时段内所有pos的平
均值,即:
[0055]
步骤4、连续记录m个监测时间区间的差分定位集合:
[0056]
k1={l
11
,l
12
,
…
,l
1n
}
[0057]
k2={l
21
,l
22
,
…
,l
2n
}
[0058]
...
[0059]km
={l
m1
,l
m2
,
…
,l
mn
}
[0060]
根据每个监测时间区间同一时刻的卫星周期性和卫星信号质量构建差分矩阵d:
[0061][0062]
步骤5、将差分矩阵d向量化得到向量y:
[0063]
y=[d
2 d3ꢀ…ꢀdm
]=
[0064]
[d
21 d
22
ꢀ…ꢀd2n d
31 d
32
ꢀ…ꢀd3n d
m1 d
m2
ꢀ…ꢀdmn
]
[0065]
步骤6、将向量y进行卡尔曼滤波得到基坑的位移检测结果x(n):
[0066]
构建卡尔曼滤波模型:
[0067]
x(n)=ax(n-1) bw
[0068]
y(n)=cx(n) v
[0069]
式中,x(n)为卡尔曼滤波的输出值,y(n)为差分矩阵向量化后的第n个测量值,w是均值为0且方差为p的白噪声,v是均值为0且方差为q的白噪声;a是状态转移矩阵,a是状态转移矩阵,b是控制输入矩阵,c是状态观测去做,
[0070]
其中,所述步骤2中的采集策略为连续采集策略或周期采集策略或自适应采集策略,其中:
[0071]
所述连续采集策略为:测量站和基准站连续监测和记录卫星定位信号,每小时定期传输给云端服务器;
[0072]
所述周期采集策略为:预设基准站和测量站的唤醒时间和唤醒长度,基准站和测量站在唤醒时间启动,采集唤醒长度时长的定位数据文件和基准定位数据文件,并传输到云端服务器后,进入休眠状态;
[0073]
所述自适应采集策略为:根据每日测量站的位移速率,当位移速率超过预设阀值是,测量站和基准站进入连续采集策略;当位移速率低于预设阀值时,进入周期采集策略。
[0074]
实验:
[0075]
利用三维平移台每隔一天向北调节2mm,采用本具体实施例的位移检测方法得到如图1所示的监测实验结果以及如图2所示的测量误差图。
[0076]
具体实施例2
[0077]
如图3所示的一种基高精度基坑位移监测方法的高精度基坑位移监测系统高精度基坑位移监测系统,包括:
[0078]
测量站1,布设在基坑2的周边位置,用于接收卫星定位信号,并将其解析成为定位数据文件存储,所述基坑的每条板上测量站1的数量大于等于3个,且所述测量站1与测量站1之间的水平间距小于20米;
[0079]
基准站3,设在远离基坑1且岩土稳定的区域,用于接收卫星定位信号,并将其解析为基准定位数据文件存储;
[0080]
云端服务器4,分别与基准站3、测量站1通信连接,定期接收基准站3的基准定位数据文件和测量站1的定位数据文件;并对定位数据文件和基准定位数据文件进行具体实施例1所述的基坑位移监测方法解算获得基坑位移结果,另外,客户端通过与云端服务器远程方位获得基坑位移结果,本具体实施例的客户端为pc机或移动终端。
[0081]
虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员,在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
