1.本发明涉及编舞技术领域,具体是指一种编舞知识的人工智能表示方法。
背景技术:
2.术语解释:pddl:planning domain definition language(规划领域定义语言)。
3.pddl3.0:pddl的3.0版本,版本增加了偏好和约束等语法规则。
4.编舞知识定义是研究人工智能舞蹈编排的基础,其中涉及到动作的表现形式,以及对舞蹈的具象表示。由定义一个舞蹈动作开始进而编排出完整的舞蹈,这些在人们对编舞知识定义中都有所体现。
5.近几年来,在人工智能编舞研究上频有成果出现,其中如何去表示一系列动作和舞蹈是人们一直需要去考虑的问题。
技术实现要素:
6.本发明提供一种编舞知识的人工智能表示方法。
7.为解决上述技术问题,本发明提供的技术方案为:一种编舞知识的人工智能表示方法,其中涉及到pddl3.0,pddl3.0支持的偏好允许人们在目标规划上描述他们的喜好特征并设计度量进行约束,最终让规划器求解的过程中尽量满足这个偏好,在舞蹈编排知识中的体现就是舞蹈专家在研究一个舞蹈如何更好的去设计的过程包括使用规划器根据偏好与目标求解得到一个规划解,其中偏好包括节奏偏好、同步控制、缓冲同步、动作连贯和动作定制,所述节奏偏好允许用户选择或直接根据音乐信息来定义舞蹈节奏的快,中,慢,这就方便了动作的幅度和持续时间根据音乐特征信息来进行调整,对快节奏舞蹈的偏好定义为:
8.(forall(?s state)(preference p-rate(best-rate?s fast)))
9.在度量中加入对此偏好的约束:
10.(:metric minimize(is-violated p-rate))
[0011]“forall”表示对所有的参数?s而言鼓励同”fast”一起出现,即是当出现的(best-rate?s?r)不是(best-rate?s fast),而是(best-rate?s mid)时,下方度量的约束会进行惩罚,其中violated表示违反的惩罚,minimize表示要使惩罚尽量小,如果不满足上述偏好,违反所获得的惩罚数值将越大,这就和度量大相径庭,所以规划器在求解的时候会尽量避免偏好的违反,最终得到的结果也会是在偏好约束下的最优解;
[0012]
所述同步控制偏好要求一些动作严格满足在相应的关键时间点音、乐与舞蹈同步的需要,动作的开始时间刚好在一个节拍点上,这就以表示为偏好或目标条件,定义为:
[0013]
(forall(?b-beat?s-state)(preference p-beat(beat-satisfy?b?s)))
[0014]
其中需要用到pddl的时间初始化语法在初始化部分定义,以此来表明节拍在某时刻开始,出现0.1s的时间后消失,即要求动作执行的开始时刻或结束时刻刚好在这个时间内:
[0015]
(at 3.3(at-beat b1))
[0016]
(at 3.4(not(at-beat b2)))
[0017]
同时在度量中加入对此偏好的约束:
[0018]
(:metric minimize(is-violated p-beat))
[0019]
此处假设动作开始和结束时刻为特征点,并提取音乐信息中的多个节拍点设置为初始化定义,从而通过偏好来进行动作和节拍点的同步;
[0020]
所述缓冲同步结合舞蹈专家对舞蹈编排的描述来定义,舞蹈动作并不需要与每一个音乐节拍严格同步,能够在一定程度上使用缓慢动作或停顿来表达音乐,将哑动作定义为领域文件的动作模型,同时在问题描述中定义哑动作的参数(自定义或根据音乐直接生成),其中哑动作偏好定义为:
[0021]
(preference p-dummy(《=(/(dummy-time)(dance-total-time))(dummy-prop))
[0022]
同时在度量中加入对此偏好的约束:
[0023]
(:metric minimize(is-violated p-dummy))
[0024]
最终规划求解的时候会考虑此偏好,从而编排哑动作总时间(dummy-time)占舞蹈总时间(dance-total-time)的比例不大于dummy-prop的定义值,适量的哑动作减缓舞蹈节奏,对缓慢的音乐更具有表现能力,但是过多的哑动作会导致舞蹈元素过于单调,所以哑动作的比例值要认真考虑;
[0025]
所述动作连贯包括部分动作之间会有一定的关联性,这些在各个舞蹈编排中都有所体现,如芭蕾舞对手位的切换是有一定的要求,严格的遵循手位切换顺序可能得到更多的分数,在流行舞中,对手位没有过多的约束,只考虑舞蹈动作的流畅度,那么两个平滑衔接的动作被看作有一定的关联性,定义为:
[0026]
(forall(?s-state)(preference p-coherent(coherent-satisfy?s))或(preference p-coherent-s12(sometime-after(conherent-satisify s1)(conherent-satisify s2)))
[0027]
其中第一个的对象为舞蹈编排中的所有动作,第二个是单独说明了动作s1和动作s2的连贯性,表示鼓励动作s2衔接在动作s1后面,使用sometime-before语法(反过来)也是一样的效果,同时在度量中加入对此偏好的约束:
[0028]
(:metric minimize(is-violated p-coherent))|(:metric minimize(is-violated p-coherent-s12))
[0029]
对所有的?s都应该根据动作关联性来进行衔接,不考虑动作关联性的衔接则会受到惩罚,越多的相关性动作衔接在一起,舞蹈也会更加的平滑;
[0030]
所述动作定制包括部分动作对某些音乐来说应该出现的适当的位置,比如骑马舞中到特定的节奏会做出骑马这一代表性的动作,因为本发明中也根据此特点进行偏好定义:
[0031]
(preference p-during-s1015(hold-during 10 15(finished s1)))
[0032]
此处偏好要求在10s-15s(单位来源于对问题的定义)中需要满足((finished s1)这一谓词,即是在10s-15s要求出现动作s1,在度量中加入对此偏好的约束:
[0033]
(:metric minimize(is-violated p-during-s1015))。
[0034]
本发明具有如下优点:本发明的目的在于提供一种编舞知识的人工智能表示方
法,结合pddl3.0中的偏好约束定义并结合其中的度量对舞蹈问题的规划进行约束和优化后,使用规划器进行求解得到最终的舞蹈编排,在融入了专家知识的pddl偏好和度量的方法下所得到的舞蹈编排无疑更接近人类审美观,让最终呈现的舞蹈有更多的观赏性以及更加优美,能够体现更多现实舞蹈元素。
附图说明
[0035]
图1是本发明偏好定义示意图。
[0036]
图2是本发明度量定义示意图。
[0037]
图3是本发明节奏偏好的定义示意图。
[0038]
图4是本发明节拍偏好的定义示意图。
[0039]
图5是本发明哑动作偏好的定义示意图。
[0040]
图6是本发明动作连贯示意图。
具体实施方式
[0041]
下面结合附图对本发明做进一步的详细说明。
[0042]
结合所有附图,一种编舞知识的人工智能表示方法,其中涉及到pddl3.0,pddl3.0支持的偏好允许人们在目标规划上描述他们的喜好特征并设计度量进行约束,最终让规划器求解的过程中尽量满足这个偏好,在舞蹈编排知识中的体现就是舞蹈专家在研究一个舞蹈如何更好的去设计的过程包括使用规划器根据偏好与目标求解得到一个规划解,其中偏好包括节奏偏好、同步控制、缓冲同步、动作连贯和动作定制,所述节奏偏好允许用户选择或直接根据音乐信息来定义舞蹈节奏的快,中,慢,这就方便了动作的幅度和持续时间根据音乐特征信息来进行调整,对快节奏舞蹈的偏好定义为:
[0043]
(forall(?s state)(preference p-rate(best-rate?s fast)))
[0044]
在度量中加入对此偏好的约束:
[0045]
(:metric minimize(is-violated p-rate))
[0046]“forall”表示对所有的参数?s而言鼓励同”fast”一起出现,即是当出现的(best-rate?s?r)不是(best-rate?s fast),而是(best-rate?s mid)时,下方度量的约束会进行惩罚,其中violated表示违反的惩罚,minimize表示要使惩罚尽量小,如果不满足上述偏好,违反所获得的惩罚数值将越大,这就和度量大相径庭,所以规划器在求解的时候会尽量避免偏好的违反,最终得到的结果也会是在偏好约束下的最优解;
[0047]
所述同步控制偏好要求一些动作严格满足在相应的关键时间点音、乐与舞蹈同步的需要,动作的开始时间刚好在一个节拍点上,这就以表示为偏好或目标条件,定义为:
[0048]
(forall(?b-beat?s-state)(preference p-beat(beat-satisfy?b?s)))
[0049]
其中需要用到pddl的时间初始化语法在初始化部分定义,以此来表明节拍在某时刻开始,出现0.1s的时间后消失,即要求动作执行的开始时刻或结束时刻刚好在这个时间内:
[0050]
(at 3.3(at-beat b1))
[0051]
(at 3.4(not(at-beat b2)))
[0052]
同时在度量中加入对此偏好的约束:
[0053]
(:metric minimize(is-violated p-beat))
[0054]
此处假设动作开始和结束时刻为特征点,并提取音乐信息中的多个节拍点设置为初始化定义,从而通过偏好来进行动作和节拍点的同步;
[0055]
所述缓冲同步结合舞蹈专家对舞蹈编排的描述来定义,舞蹈动作并不需要与每一个音乐节拍严格同步,能够在一定程度上使用缓慢动作或停顿来表达音乐,将哑动作定义为领域文件的动作模型,同时在问题描述中定义哑动作的参数(自定义或根据音乐直接生成),其中哑动作偏好定义为:
[0056]
(preference p-dummy(《=(/(dummy-time)(dance-total-time))(dummy-prop))
[0057]
同时在度量中加入对此偏好的约束:
[0058]
(:metric minimize(is-violated p-dummy))
[0059]
最终规划求解的时候会考虑此偏好,从而编排哑动作总时间(dummy-time)占舞蹈总时间(dance-total-time)的比例不大于dummy-prop的定义值,适量的哑动作减缓舞蹈节奏,对缓慢的音乐更具有表现能力,但是过多的哑动作会导致舞蹈元素过于单调,所以哑动作的比例值要认真考虑;
[0060]
所述动作连贯包括部分动作之间会有一定的关联性,这些在各个舞蹈编排中都有所体现,如芭蕾舞对手位的切换是有一定的要求,严格的遵循手位切换顺序可能得到更多的分数,在流行舞中,对手位没有过多的约束,只考虑舞蹈动作的流畅度,那么两个平滑衔接的动作被看作有一定的关联性,定义为:
[0061]
(forall(?s-state)(preference p-coherent(coherent-satisfy?s))或(preference p-coherent-s12
[0062]
(sometime-after(conherent-satisify s1)(conherent-satisify s2)))
[0063]
其中第一个的对象为舞蹈编排中的所有动作,第二个是单独说明了动作s1和动作s2的连贯性,表示鼓励动作s2衔接在动作s1后面,使用sometime-before语法(反过来)也是一样的效果,同时在度量中加入对此偏好的约束:
[0064]
(:metric minimize(is-violated p-coherent))|(:metric minimize(is-violated p-coherent-s12))
[0065]
对所有的?s都应该根据动作关联性来进行衔接,不考虑动作关联性的衔接则会受到惩罚,越多的相关性动作衔接在一起,舞蹈也会更加的平滑;
[0066]
所述动作定制包括部分动作对某些音乐来说应该出现的适当的位置,比如骑马舞中到特定的节奏会做出骑马这一代表性的动作,因为本发明中也根据此特点进行偏好定义:
[0067]
(preference p-during-s1015(hold-during 10 15(finished s1)))
[0068]
此处偏好要求在10s-15s(单位来源于对问题的定义)中需要满足((finished s1)这一谓词,即是在10s-15s要求出现动作s1,在度量中加入对此偏好的约束:
[0069]
(:metric minimize(is-violated p-during-s1015))。
[0070]
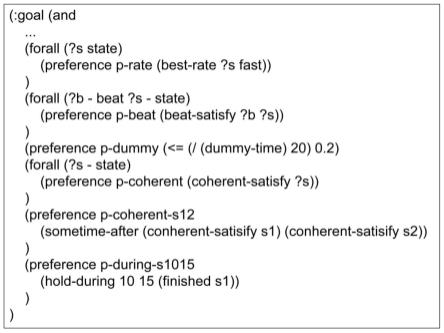
本发明在具体实施时,规划文件定义:根据预先准备好的动作库定义动作模型,定义为规划领域文件,再提取需要进行编舞的音乐中的特征信息:bpm,节拍等,进而定义为部分规划问题文件,通过专家对这首音乐的情境、类型的理解,结合已有动作模型定义偏好信息优化舞蹈求解。
[0071]
如图1为本发明所提到的偏好定义,其中哑动作部分的比例设置为0.2,舞蹈总时长,要求为20s,那么哑动作在最终的规划解中的时长不能超过4s。图2为偏好对应的度量约束,其中根据对不同偏好的需求设置其惩罚权重,按照当前设置,满足的偏好顺序为动作定制》动作连贯》同步控制》节奏偏好》缓冲同步;
[0072]
规划器求解:通过支持pddl3的已有规划器:如optic规划器对上述规划文件进行求解可以得到其规划解,规划解为一组动作序列,也即是我们所要的舞蹈。
[0073]
综上所述,本发明一种编舞知识的人工智能表示方法,通过定义专家的知识为规划问题进行求解,让舞蹈结果更加的贴近音乐,动作也更加的平滑,大大提高了最终的舞蹈效果。
[0074]
本发明的工作原理:图3所示为本发明中根据bpm这一音乐特征来调整动作的持续时间,从而调控动作执行的快慢,以此来与音乐相对照。
[0075]
图4所示为本发明中根据节拍这一音乐特征与动作进行同步,假设动作的开始时刻和结束时刻为特征点,以及来对应节拍点的出现。
[0076]
图5所示为本发明中哑动作的定义效果,通过保持前一个动作的结束时刻动作,让舞蹈动作乍然而止,继而能够体现音乐元素,曲线的轨迹即为动作的运行轨迹。
[0077]
图6所示为本发明中动作连贯的定义,通过动作关联性选取恰当的动作进行衔接,当部分非关联性动作衔接时可能出现左边的直角弯曲,让动作轨迹不再平滑,舞蹈中出现卡顿的效果,关联性强的动作轨迹将如同右边一样光滑。
[0078]
本发明是一种编舞知识的人工智能表示方法,通过pddl3中的语法,将舞蹈问题抽象为规划问题来看待,其中将专家知识体现在偏好和度量约束部分,通过动作关联性和音乐信息的限制,优化了规划的求解结果,让输出的动作序列更加的贴近音乐,动作间也更加的平滑,观赏性更强。
[0079]
以上对本发明及其实施方式进行了描述,这种描述没有限制性,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。