1.本发明涉及认知无人机自组网技术领域,具体涉及一种认知无人机自组网下的确定性盲交会方法。
背景技术:
2.在现代信息化对抗场景中,恶劣的现场条件使得无线电磁环境更为复杂多变,可用的频谱资源非常稀少,尤其在受到恶意的针对性干扰时,更容易造成通信中断、网络时延波动大、消息延误等问题,而无人机自组网协同任务复杂,更是极度依赖电磁频谱的保障,为了应对极为具有挑战性的无线频谱环境,无人机自组网将认知无线电技术与无线自组网技术进行结合,意图充分发挥两者的技术优势,解决现实无线网络应用的问题。传统单接口自组网存在资源利用能力不足和组网鲁棒性差,难以适应复杂动态无线频谱环境等诸多问题,亟需在无人机自组网中引入多接口多信道技术,对于在只有异构的时钟、可用信道、频谱感知能力,没有预设的角色分配、用户个体标识符、总计的信道数,不同授权信道标签的完全分布式异构网络环境下,多接口无人机节点通过自动感知周围的电磁环境发现可用的频谱资源集后,如何与其他节点建立有效的通信链路是感知之后、通信之前需要解决的首要问题,也是实现网络架构建立的前提,因此如何在异构无人机分布式自组网环境下形成一个优异交会时间ttr(time to rendezvous)的信道交会技术是一个值得探讨的问题。
3.为实现无人机节点间的通信交互信息数据,首先要在一个相同的可用信道上与其他无人机节点相遇从而建立通信链路,也就是交会,但每一个无人机节点的可用频谱差异性及动态性导致交会不易实现,现存多节点组网算法往往存在一些弊端:过度依赖公共控制信道,所有节点均在公共控制信道上实现交会;或不能实现自组织,而仍由一个各种形式的控制中心来掌控全局等。因此,无需预定公共控制信道的盲交会技术的研究近年来备受关注,其中信道跳频(channel hopping,ch)被认为是解决交会问题的一种很有前途的方法。
4.认知自组网下的信道交会主要分为两大类,即存在辅助设备的信道交会算法和盲信道的信道交会算法,存在辅助设备的信道交会算法明显的优点是算法简单,简化了认知用户之间的信道交会建立链路的过程,但同时也存在一些问题,覆盖全网的中心控制器或者专用公共控制信道,在信道交会的整个过程中负载不断增加,限制了网络容量,同时面临着被蓄意攻击导致整个网络瘫痪的风险,降低了网络的鲁棒性,盲信道节点算法与之截然相反,它不依赖网络中的公共控制信道或者中心控制器,而是一种动态的灵活的信道交会策略,满足了认知自组网的动态变化的特性,而配备多个无线电接口的无人机节点可以同时接入更多的信道,这表明交会过程可以加快。
5.双用户多接口交会,一个基于伽罗瓦理论(galois theory)的适用于多无线电场景的信道跳频方案被提出,其中要求信道数量p为质数,该跳频序列的一个重要结论是,√p接口需要获得最佳的交会机会,ear算法是js算法的扩展,信道按质量排序,越好的信道访问越频繁。
6.多用户多接口交会,一些现有的多用户交会算法(如js)简单地利用了信道信息同步技术,一旦单个用户实现成对交会,它们将交换它们的信道信息(例如,标识和本地时钟),并同步它们的信道序列,之后,遇到的新用户将通过使用相同的跳频序列来切换信道,这种方式会导致不可容忍的交会延迟,尤其是当相邻的单个用户数量很大时。作为对策,一些算法采用协作和中继框架,在这种框架下,信道跳频序列可以通过相邻中继站进行调整,并且交会延迟可以显著降低。然而,现有的协作算法被应用于一些非分布式场景,例如已知全局信道的数量和节点间角色的区分。
7.在信道交会算法中,交会时间是一个最主要考虑的指标,同时为了保证交会的确定性算法需要保证最大交会时间有上限,然而,在异步情况下,现有技术的算法不能保证交会,显然,对于交会算法,提前需要获取的信息量越少,算法的应用面也就越广。现有技术中的算法用到的框架,可以降低交会时间,但是其被应用于非分布式场景中,例如已知全局信道的数量和角色的区分(即,发送者和接收者)。基于现有技术存在的如上述问题,本发明提供一种认知无人机自组网下的确定性盲交会方法。
技术实现要素:
8.本发明提出了一种认知无人机自组网下的确定性盲交会方法,通过对本地信道按其质量排序及拓展,利用向日葵定理作为跳频序列设计的基础,使其适用于完全异构网络,并对跳频序列基于占空比框架的唤醒设计,有效降低了平均交会时间和最大交会时间的大小,高效并符合实际地实现多接口认知无人机自组网盲信道交会目的。
9.本发明采用以下技术方案:
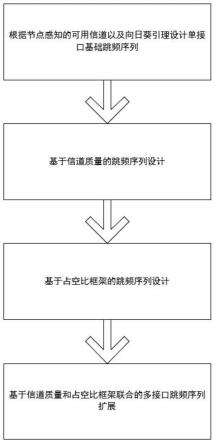
10.一种认知无人机自组网下的确定性盲交会方法,包括:
11.步骤1,根据节点感知的可用信道以及向日葵引理设计单接口基础跳频序列;
12.步骤2,基于信道质量,设计跳频序列;
13.步骤3,基于占空比框架,设计跳频序列;
14.步骤4,基于信道质量和占空比框架,扩展多接口跳频序列。
15.进一步地,步骤1中包括:
16.步骤1.1,获取无人机节点ua可用信道ca,并得到不小于na(na=|ca|)的最小质数pa;
17.步骤1.2,根据极值集合理论中的向日葵引理构造pa个花瓣,每个花瓣包含6pa元素的向日葵序列s={a0,a1,...,a
pa-1
},其中每个s中的花瓣有个初始元素,其余的个元素,利用初始元素与最小质数的模运算的结果,按照索引的顺序进行逐一分配;
18.步骤1.3,构筑向日葵集合,将向日葵集合通过利用时隙的索引与向日葵集合进行模运算得到的中间变量与序列的周期索引进行逐一匹配计算,并与节点的可用信道结合起来,以此生成基于向日葵引理的单接口sss跳频序列。
19.进一步地,步骤2中:无人机节点根据本地信道ci按质量高低进行排序得到信道集合c
′i={c
′i|i=1,2...,m},为每个信道c
′i构造相应的di来标识该信道频次,c
′i信道质量越高所分配di频次数值越高,di由下式求得:
20.21.其中,d1>d2>...>di≥1,m为无人机节点本地信道数目,p为不大于可用信道数m的最小质数,c
′i中每个信道按照所配置di频次构造后得到本地信道集合频次构造后得到本地信道集合将序列ei按sss跳频序列构建方式得到基于向日葵引理的新单接口nsss跳频序列fi。
22.进一步地,步骤3中,无人机节点通过构造一个基于占空比的唤醒调度序列,对基于信道质量所生成的跳频序列fi进行过滤处理后得到基于信道质量和占空比框架的跳频序列设计改进的nsss跳频序列fj,占空比表示了节点信道活跃时间占总周期的百分比:
23.通过下式(2)选定δi,给定任意时钟偏移k,
[0024][0025]
其中,ti,tj分别为节点i和节点j跳频序列的周期,δi为节点i的唤醒调度序列;
[0026]
通过下式(3)将序列δi延长至整个周期ti形成基于占空比唤醒序列xi:
[0027][0028]
对xi按下列方式进行特定时钟的循环旋转得到新的唤醒序列
[0029][0030]
其中,给定任意时钟偏移k,使得:
[0031][0032]
节点i利用占空比框架xi和跳频序列fi通过式(6)和(7)设计新的跳频序列fj,考虑到唤醒序列需要延长至跳频序列周期长度一致的问题,在占空比序列无法被周期长度n整除时对周期进行调整至n’:
[0033][0034][0035]
如在第t mod ti个时隙中新序列与原序列相同,否则在原序列相应位置添加一个随机可用信道r,得到一个新的跳频序列fj。
[0036]
进一步地,步骤4中:
[0037]
当无人机节点ua装备有m个接口时,为某个接口生成周期性的新的跳频序列fj,然后为剩余的m-1个接口基于循环轮换方法将前一个接口的跳频序列以2pa时隙为单位进行移位,最终得到所有接口上的跳频序列:
[0038]sak
=rotate(s
a,k-1
,2pa)......(8),
[0039]
其中,s
ak
代表节点ua的第k个接口的跳频序列,s
a1
=fj;pa是不小于节点ua的可用信道数的最小质数;
[0040]
无人机节点ua和和配备n个接口的节点ub并行跳频,分别在时隙和完成一个周期的跳频,节点ua和节点ub相同的信道跳频序列周期是单接口场景的1/mn,多接口
节点间最大交会时间也是单接口间最大交会时间的1/mn。
[0041]
与现有技术相比,本发明的优越效果在于:
[0042]
1、本发明所述的认知无人机自组网下的确定性盲交会方法,利用向日葵引理构建基础跳频序列,保证适应无人机自组网完全异构的场景;
[0043]
2、本发明所述的认知无人机自组网下的确定性盲交会方法,为了提升信道交会性能、提升后续信道链路质量,每个无人机节点感知信道质量并选择优质信道,在确保了信道交会算法的确定性的同时不提高信道交会算法的交会时间;
[0044]
3、本发明所述的认知无人机自组网下的确定性盲交会方法,建立信道序列占空比框架来改进跳频序列,从而降低交会时间并仍保证确定性和交会多样性;
[0045]
4、本发明所述的认知无人机自组网下的确定性盲交会方法,实现多接口的跳频序列设计的扩展,将单接口的跳频序列进行整体移位处理分配获得多接口跳频序列,可极大降低交会时间。
附图说明
[0046]
图1为本发明实施例中认知无人机自组网下的确定性盲交会方法的流程示意图;
[0047]
图2为本发明实施例中sss跳频序列构建的流程示意图;
[0048]
图3为本发明实施例中nsss跳频序列构建的流程示意图;
[0049]
图4为本发明实施例中多用户交会流程图;
[0050]
图5为本发明实施例中基于占空比框架跳频序列的示意图;
[0051]
图6a为本发明实施例中无人机节点信道交会mttr的性能在单接口与多接口情况下的比较示意图;
[0052]
图6b为本发明实施例中无人机节点信道交会ettr的性能在单接口与多接口情况下的比较示意图;
[0053]
图7a为本发明实施例中仅基于信道质量改进时的nmss算法时信道交会mttr的性能与其他算法的比较示意图;
[0054]
图7b为本发明实施例中仅基于信道质量改进时的nmss算法时信道交会ettr的性能与其他算法的比较示意图;
[0055]
图8a为本发明实施例中基于信道质量和占空比框架的跳频序列设计改进的nmss算法时信道交会mttr的性能与其他算法的比较示意图;
[0056]
图8b为本发明实施例中基于信道质量和占空比框架的跳频序列设计改进的nmss算法时信道交会ettr的性能与其他算法的比较示意图。
具体实施方式
[0057]
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述,需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
[0058]
实施例
[0059]
如图1所示,所述认知无人机自组网下的确定性盲交会方法,包括:
[0060]
步骤1,根据节点感知的可用信道以及向日葵引理设计单接口基础跳频序列;
[0061]
步骤2,基于信道质量,设计跳频序列;
[0062]
步骤3,基于占空比框架,设计跳频序列;
[0063]
步骤4,基于信道质量和占空比框架,扩展多接口跳频序列。
[0064]
在信道交会过程中,每个无人机节点ui(i=a,b,...,m)拥有自己特有的可用信道集ci∈c,在异构无人机自组网中,每个无人机节点拥有不同的可用信道集,用表示所有m个无人机节点的公共可用信道集,这些m个节点可以彼此交会当且仅当假定节点ua配备m个接口,节点ub配备n个接口,ua产生的跳频序列为sa={s
a1
,s
a2
,...,s
am
,},其中表示ua的m接口在t时隙使用信道这样交会问题可以表示为:
[0065][0066]
其中,ca和cb分别表示无人机两节点a和b的可用信道集合,δ表示无人机两节点a和b的时钟偏移。
[0067]
如图2所示,步骤1中,利用异构无人机网络中每个节点单接口上可用信道以及向日葵引理构建节点的sss跳频序列,保证了异构场景无人机自组网的信道盲交会,具体的:首先获取无人机节点ua可用信道ca,并得到不小于na(na=|ca|)的最小质数pa,其次根据极值集合理论中的向日葵引理构造一个pa个花瓣及每个花瓣恰好包含6pa元素的向日葵序列s={a0,a1,...,a
pa-1
},其中每个s中的花瓣有个初始元素,其余的个元素,利用初始元素与最小质数的模运算的结果,按照索引的顺序进行逐一分配,最后在构筑向日葵集合的基础上,将集合加以相应的计算与节点的可用信道结合起来,并且通过利用时隙的索引与集合进行模运算得到的中间变量与序列的周期索引进行逐一匹配来生成跳频序列,每个无人机节点的某接口按照产生的跳频序列的顺序在其指定信道上进行跳转,如果不同无人机节点任意接口在相同时隙接入相同的可用信道,即实现交会。sss跳频序列构建过程的伪代码如表1所示:
[0068][0069]
表1
[0070]
如图3所示,步骤2、3中,针对sss跳频序列构建输入过程中,无人机节点按本地信道质量从高到低进行排序,并将质量高的信道高频率地出现在跳频序列中,在不影响算法
确定性的前提下可得到几乎相同的交会时间并且可以提高链路通信质量;同时为了进一步改善优异交会时间ttr,本实施例中使用信道序列占空比框架的设计对跳频序列改进,使平均交会时间ettr(expected time-to-rendezvous)和最大交会时间mttr(maximum time-to-rendezvous,)进一步降低,最终生成了nsss跳频序列,具体的:
[0071]
(1)基于信道质量的跳频序列设计
[0072]
无人机节点根据本地信道ci按质量高低进行排序得到信道集合c
′i={c
′i|i=1,2...,m},为每个信道c
′i构造相应的di来标识该信道频次,c
′i信道质量越高所分配di频次数值越高,di由下面关系式求得:
[0073][0074]
其中,d1>d2>...>di≥1,m为无人机节点本地信道数目,p为不大于可用信道数m的最小质数;
[0075]c′i中每个信道按照所配置di频次构造后得到本地信道集合频次构造后得到本地信道集合例如,假设无人机节点可用信道集合为ci={2,3,5},因此不大于可用信道数的最小质数p=3,质量排序后c
′i={3,2,5},此时d={d1,d2,d3}={3,2,1},因此排序后本地信道集合ei={3,3,3,2,2,5},最后将序列ei按sss跳频序列构建方式得到跳频序列fi;
[0076]
(2)基于占空比的唤醒调度设计框架
[0077]
无人机节点通过构造一个合适的基于占空比的唤醒调度序列,对基于信道质量所生成的跳频序列fi进行过滤处理后得到新的跳频序列fj,占空比表示了节点信道活跃时间占总周期的百分比,例如某节点i的唤醒调度序列为δi={0,0,1,1,0},那么其占空比为40%,
[0078]
首先,需要通过下式选定合适的δi,给定任意时钟偏移k,
[0079][0080]
其中,ti,tj分别为节点i和节点j跳频序列的周期,δi为节点i的唤醒调度序列,然后,通过下式将序列δi延长至整个周期ti形成基于占空比唤醒序列xi:
[0081][0082]
其次,对xi按下列方式进行特定时钟的循环旋转得到新的唤醒序列
[0083][0084]
其中,给定任意时钟偏移k,使得
[0085][0086]
最后,节点i利用占空比框架xi和跳频序列fi设计新的跳频序列fj,考虑到唤醒序列可能需要延长至跳频序列周期长度一致的问题,该方法会在占空比序列无法被周期长度n整除时对周期进行调整至n’:
[0087][0088][0089]
如果在第t mod ti个时隙中新序列与原序列相同,否则在原序列相应位置添加一个随机可用信道r,也就是说,在第t个时隙,新产生的跳频序列由占空比框架决定的,这样,最终得到一个新的跳频序列fj,基于占空比框架跳频序列设计实例如图5所示,建立占空比设计框架,每个用户在活跃状态复写原跳频序列或在非活跃状态将序列中插入随机可用信道,使得交会时间得到进一步的降低。该方法伪代码如下表2所示:
[0090][0091]
表2
[0092]
步骤4中,配备多接口无人机节点可以同时接入更多的信道,使得跳频序列数增多从而加大交会几率,从而加快交会过程,本实施例中,nsss跳频序列进行了多接口适配的扩展,设计出基于多接口nmss(new multi-radio sunflower-set-based)跳频序列,由于单接口算法的确定性交会的性质,多接口因此可以保证确定性交会,多接口还可以进一步降低交会时间,具体的:
[0093]
(1)多接口两用户交会
[0094]
当无人机节点ua装备有m个接口时,首先使用nsss算法为某个接口生成周期性跳频序列fj,然后为剩余的m-1个接口基于循环轮换方法将前一个接口的跳频序列以2pa(pa是不小于节点ua的可用信道数的最小质数)时隙为单位进行移位,最终得到所有接口上的跳频序列:
[0095]sak
=rotate(s
a,k-1
,2pa)
[0096]
其中,s
ak
代表节点ua的第k个接口的跳频序列,s
a1
=fj;
[0097]
无人机节点ua和配备n个接口的节点ub并行跳频,他们将分别在时隙和和完成一个周期的跳频,这两节点相同的信道跳频序列周期是单接口场景的1/mn,多接口节点间最大交会时间也是单接口间最大交会时间的1/mn,nmss的伪代码如表3所示:
[0098][0099]
表3
[0100]
(2)多接口多用户交会
[0101]
两无人机节点交会完成后形成一个合作组,在此基础上,当有新无人机节点接入该合作组,组内成员通过本地广播过程交换并且存储其他成员的跳频信息。
[0102]
图4所示为多用户交会流程,首先每个节点会根据自身接口数去调用相应的算法(nsss/nmss)构建跳频序列,小组成员根据特有的跳频序列独立切换信道,这样,这些组内的成员可以构成一组具有丰富信道多样性的跳频序列,任意两个节点发生交会,会互相交换彼此信息并形成合作组,如果组中的任何成员访问与新加入的无人机节点u相同的可用信道,该成员将通知其他成员调整它们的跳频序列,并在下一个时隙访问相同的公共可用信道,因此,实现了多用户交会,上述协同方案通常可以加快交会过程,除了对所有用户可用的信道之外,任意两个用户也可以共享一些共同的可用信道(用表示任意两个无人机节点u(ui和uj)除外共有的可用信道集),该方法伪代码可如下表4所示:
[0103][0104]
表4
[0105]
多用户交会的最差情况是所有节点的相同的可用信道只有全局的而任意两节点除此之外相互之间没有其他的相同可用信道。此时该方案就减化成(m-1)次的双用户交会,那么方案的上边界为:
[0106][0107]
多用户合作方案的最好情况是任意两个节点相互之间拥有相同数目的可用信道,那么方案的下边界为:
[0108]
1/p
im
=(ni·
nm)/((m-1)
·
(g |c
im
|))。
[0109]
为了验证本实施例中认知无人机自组网下的确定性盲交会方法的技术效果,对所述方法进行性能仿真:
[0110]
(1)不同接口数nmss交会的性能比较
[0111]
仿真场景中无人机自组网中总信道数n为40,节点ua的可用信道数na为20,配备接口数m为1~3,节点ub的可用信道数nb为25,配备接口数n为1~3,假定节点ua和ub在同一情况下配备相同的接口数,在仿真中,通过变化节点间相同可用信道数g来观察接口数量对节点交会的性能影响,其中g需满足条件na n
b-g≤n和1≤g≤min{na,nb},对于每个g值,仿真结果都是运行10000次所取得的均值统计而成。
[0112]
仿真结果如图6a和6b所示,基于信道质量和占空比框架的跳频序列设计的改进算法,nmss为最终的基于向日葵引理的多接口nmss(new multi-radio sunflower-set-based)跳频序列,无人机节点信道交会mttr和ettr总体随着节点间相同可用信道数增加而下降,而在相同可用信道数时,mttr及ettr随着节点接口数的增加而降低,具体来说,当每个节点的接口数从1提升到2时,mttr交会时间最大降低了56.7%,ettr交会时间最大降低了69.7%。而当节点的接口数从2提升到3时,mttr交会时间最大降低了31.7%,ettr交会时间最大降低了32.9%。由此可见,本实施例中多接口节点信道盲交会算法可显著降低交会时间。
[0113]
(2)nmss与其他算法交会性能比较
[0114]
仿真场景中无人机自组网总信道数n为40,节点ua的可用信道数na为28,配备接口数为2,节点ub的可用信道数nb为25,配备接口数为2,节点uc的可用信道数nc为20,配备接口数为3,选择mss(multi radio sunflower-set-based),rps(role-based parallel sequence)算法和mb(multichannel broadcast,用到的数学定理是langfordparing)算法进行对比算法的比较,在仿真中,通过变化节点间相同可用信道数g来观察nmss、mss、rps及mb四种算法的节点交会性能差异,对于每个g值,仿真结果都是运行10000次所取得的均值统计而成。
[0115]
图7a和图7b中的nmss为本实施例中基于信道质量的跳频序列设计的改进算法,nmss为仅基于信道质量的中间版本nmss,从图中可知此时nmss算法的mttr性能比rps算法最大降低了16.7%,比mb算法最大降低了26.7%,与mss算法几乎一致,此时nmss算法的ettr性能比rps算法最大降低了5.2%,但略高于mb,与mss算法几乎一致,其中,mb虽然性能略好,但算法限制条件较多,此时的nmss交会性能相对于mss来说并没有提高,但是有益于实际链路通信质量。
[0116]
图8a和图8b中的nmss为本实施例中基于信道质量和占空比框架的跳频序列设计的改进算法,nmss为最终的基于向日葵引理的多接口nmss(new multi-radio sunflower-set-based)跳频序列,可以看出在图7a和图7b基础上在加入信道序列占空比唤醒机制之后,nmss算法的ettr与mttr性能明显均高于其他算法,其中nmss的mttr性能比rps算法最大降低了29.3%,比mb最大降低了37.8%,比mss算法最大降低了12.8%,nmss算法的ettr性
能比rps算法最大降低了22.5%,比mb算法最大降低了7.3%,比mss算法最大降低了16.4%,显然,本实施例提出的nmss方法可以进一步降低交会时间提升交会效率。
[0117]
本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。