1.本发明涉及设施农林技术领域,特别是涉及一种给草莓花朵授粉的末端执行器及装置。
背景技术:
2.草莓是蔷薇科草莓属多年生草本植物,适应性强,是世界上栽培面积最广的水果之一,由于草莓具有极高的营养、药用价值和抗衰老功效,口感酸甜鲜美而备受人们的喜爱,目前是我国第二大浆果,近年来,草莓采摘园迅速发展,草莓的消费逐渐成为国内水果市场不可或缺的组成部分,而草莓的种植技术中草莓花朵的授粉技术极为关键。
3.目前,对草莓花朵的授粉主要有自然授粉、人工授粉以及蜜蜂授粉;其中,自然授粉主要是指打开大棚的换气门,让昆虫自然飞入到大棚内对草莓花朵进行授粉,但是不同于在开放的室外,在大棚内没有风的作用辅助授粉,昆虫比较难进入到大棚内对花朵进行授粉,即便有昆虫进入到大棚内授粉,效率也非常低,无法保证效率和准确率,且自然授粉方式也存在可能会对当前大棚内温度平衡造成破坏,使得作物生长受到影响的不足;人工授粉主要是指直接使用毛刷沾上雄蕊花粉刷于雌蕊表面,或者收集雄蕊花粉后使用气吹逐一喷洒雌蕊,但是由于草莓花朵数量众多,人工授粉费时费力并可能存在遗漏授粉的情况,且人工授粉很难保证授粉的均匀性以及用力的准确,若涂刷不均匀将会导致某些子房结构无法发育,会形成畸形果失去经济价值,若用力不准确,不小心破坏了子房结构,则也会产生畸形果或不育果,同时,草莓花粉不同于其他作物花粉易收集,收集到气吹后再喷洒非常困难;蜜蜂授粉主要是指在大棚内种植草莓的同时饲养蜜蜂借助蜜蜂进行授粉,但是蜂群管理困难,管理不当会造成蜜蜂伤亡,导致坐果率下降。
4.因此,考虑到目前大棚内种植草莓使用人工授粉费时费力,且用力不精准容易破坏雌蕊子房结构,使用蜜蜂授粉成本高、使用自然授粉效率和准确率低下等因素,市场上急需一种可以进行人工授粉的自动化装置来达到节省人力成本、精准可控授粉的目的。
5.需要说明的是,在上述背景技术部分公开的信息仅用于对本技术的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
6.本发明的主要目的在于克服上述背景技术的缺陷,提供一种给草莓花朵授粉的末端执行器及装置。
7.为实现上述目的,本发明采用以下技术方案:
8.一种给草莓花朵授粉的末端执行器,包括控制装置、气泵、机构连接件和气流调节机构,其中:所述机构连接件包括连接件主体、缓冲气室、气室进气口、气室出气口以及气室出气导管,所述缓冲气室与所述连接件主体连接,所述气室进气口和所述气室出气口均设置在所述缓冲气室上,所述气室出气导管与所述气室出气口连通;所述气泵与所述连接件主体连接,所述气泵的出气口与所述气室进气口通过气泵导管连通;所述气流调节机构包
括支架、偏转机构和连杆机构,所述支架与所述缓冲气室连接,所述偏转机构与所述连杆机构均安装在所述支架上,所述连杆机构还与所述偏转机构连接,所述气室出气导管与所述连杆机构连接;所述控制装置用于控制所述气泵的出气量,以及控制所述偏转机构的偏转来带动所述连杆机构运动,从而控制所述气室出气导管吹出气流的大小和方向。
9.优选地,所述偏转机构包括舵机和舵盘,所述舵机安装于所述支架上,所述舵盘与所述舵机同心地固定在所述舵机上并与所述舵机啮合。
10.优选地,所述连杆机构包括第一连杆、十字锁扣、第二连杆和第三连杆,所述第一连杆的一端与所述舵盘连接,另一端与所述十字锁扣连接,所述第二连杆的两端分别与所述十字锁扣和所述第三连杆的一端连接,所述第三连杆与所述支架活动连接,所述气室出气导管与所述第三连杆的末端固定连接;其中,所述第一连杆随着所述舵盘的偏转而水平转动,所述十字锁扣及所述第二连杆将所述第一连杆的水平运动转化为所述第三连杆的末端的开合运动,从而控制所述第三连杆的末端的开合角度以控制所述气室出气导管吹出的气流的方向。
11.优选地,所述缓冲气室为法兰气室,所述连接件主体与所述法兰气室同心固定,所述气室进气口和所述气室出气口均设置于所述法兰气室的侧面。
12.优选地,所述气室出气口有3-5个,所述连杆机构的数量与所述气室出气口相等,一个所述气室出气导管对应连接固定在一个第三连杆的末端上。
13.优选地,所述气室进气口为一个,所述气室出气口等弧度分布于所述缓冲气室的侧面。
14.优选地,所述第一连杆是弧形的。
15.优选地,所述舵盘的偏转角度为0-90
°
,所述第三连杆的末端的开合角度为0-60
°
。
16.优选地,所述控制装置为主控板,其固定于所述连接件主体的顶部,所述气泵安装于所述连接件主体的侧面。
17.一种给草莓花朵授粉的装置,包括所述的末端执行器以及具有rgb-d能力的机械臂,所述末端执行器安装在所述机械臂的末端,所述末端执行器的控制装置与所述机械臂的控制器通信连接,并基于所述机械臂的控制器的指令而控制所述气泵的出气量,以及控制所述偏转机构的偏转来带动所述连杆机构运动,从而控制所述气室出气导管吹出气流的大小和方向。
18.本发明具有如下有益效果:本发明通过控制装置可以实现对偏转机构角度的精确控制以及对气泵输出气流的大小的控制,偏转机构的偏转进而控制连杆机构相对于偏转机构轴线的开合角度,以达到控制气泵输出气流的方向的控制,从而使气流以合适的气量和方向精确吹到花药上使花药扬起,非接触地对雌蕊进行授粉,具有较高的集成度和配合性,实现了对草莓的精确授粉自动化,解决了使用人工授粉费事费力,且用力不精准容易破坏雌蕊结构,使用蜜蜂授粉成本高等问题。
附图说明
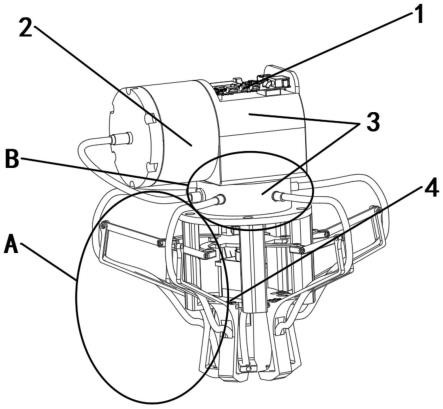
19.图1为本发明实施例中的给草莓花朵授粉的末端执行器的立体示意图;
20.图2为图1中局部a的放大结构示意图;
21.图3为图1中局部b的放大结构示意图;
22.图4为本发明实施例中的末端执行器的控制装置的结构示意图;
23.图5为本发明实施例中的末端执行器的气泵的结构示意图;
24.图6为本发明实施例中的末端执行器的机构连接件的结构示意图;
25.图7为本发明实施例中的末端执行器的气流调节机构的结构示意图。
具体实施方式
26.以下对本发明的实施方式做详细说明。应该强调的是,下述说明仅仅是示例性的,而不是为了限制本发明的范围及其应用,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合
27.需要说明的是,当元件被称为“固定于”、“设置于”、“安装于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。另外,连接既可以是用于固定作用也可以是用于耦合或连通作用。
28.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
29.此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多该特征。在本发明实施例的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
30.参阅图1-7,本发明实施例提供一种给草莓花朵授粉的末端执行器,其包括控制装置1、气泵2、机构连接件3和气流调节机构4,其中:机构连接件3包括连接件主体31、缓冲气室32、气室进气口33、气室出气口34以及气室出气导管35,缓冲气室32与连接件主体31连接,气室进气口33和气室出气口34均设置在缓冲气室32上与缓冲气室32内连通,气室出气导管35与气室出气口34连通;气泵2与连接件主体31连接,气泵2的出气口22与气室进气口33通过气泵导管23连通;气流调节机构4包括支架47、偏转机构和连杆机构,支架47与缓冲气室32连接,偏转机构与连杆机构均安装在支架47上,连杆机构还与偏转机构连接,气室出气导管35与连杆机构连接;控制装置1用于控制气泵2的出气量,以及控制偏转机构的偏转来带动连杆机构运动,从而控制气室出气导管35吹出气流的大小和方向,以达到对草莓花粉的冲击作用,使花粉在小范围空气中扬起,自然沉降到雌蕊上,实现了对草莓的授粉自动化,解决了使用人工授粉费事费力,且用力不精准容易破坏雌蕊结构,使用蜜蜂授粉成本高等问题。
31.在优选的实施例中,控制装置1为主控板,其固定于连接件主体31的顶部,例如主控板可以固定于连接件主体顶端的槽孔内,并可以使用平头螺丝约束主控板的位置,参考图4,主控板上可以设有xt30电源接口11和type-c接口12分别用于电源输入和上下位机(如后述的机械臂、舵机、气泵)通信;缓冲气室32为法兰气室,用于缓冲从气泵2出来的气流,并将气流从气室出气口34经气室出气导管35均匀吹出,缓冲气室32与连接件主体31同心地安装于连接件主体31的底部,气室进气口33和气室出气口34均设置于法兰气室的侧面,气泵2
安装于连接件主体31的侧面,气流调节机构4位于缓冲气室32下方。
32.在优选的实施例中,如图5所示,气泵2包括泵体24、进气口21、出气口22、和气泵导管23,泵体24包括连成一体的圆柱形的大端和圆柱形的小端,泵体24的小端插入连接件主体31侧面的沉孔内,进气口22固定于泵体24大端的背面,出气口22固定在泵体24大端的正面,气泵导管23固定在出气口22上用于输出一定压强的气流。可以根据需求采用不同型号的气泵,以获得需要的出气量,本示例中,采用的是出气量可以控制在0-18l/min范围内的气泵。
33.在优选的实施例中,如图6-7所示,气流调节机构4中的偏转机构包括舵盘41和舵机42,舵机42安装于支架47上,舵盘41与舵机42同心地固定在舵机42上并与舵机42啮合,即舵机42和舵盘41使用齿进行啮合传动,舵机42转动带动舵盘41旋转相同的弧度。气流调节机构4中的连杆机构包括第一连杆43、十字锁扣44、第二连杆45和第三连杆46,第一连杆43、十字锁扣44、第二连杆45、第三连杆46依次逐个连接(例如通过塞打螺栓进行连接)以形成连杆机构,具体来说,十字锁扣44分别通过塞打螺栓与第一连杆43的一端和第二连杆45的一端连接,第二连杆45的另一端通过塞打螺栓与第三连杆46的一端连接,第一连杆43的另一端与舵盘41固定,第三连杆46的杆体与支架47活动连接(例如通过轴进行活动连接),第三连杆46的另一端(即末端)作为自由端,气室出气导管35与第三连杆的末端固定连接(例如图1所示,在第三连杆46的杆体上设有通孔,气室出气导管35与通孔过盈配合从而与第三连杆的末端固定),当控制装置1控制舵机的旋转角度时,舵机42旋转同时将带动舵盘41以同样的角速度旋转,进而带动第一连杆43转动,在第一连杆43转动时,十字锁扣44及第二连杆45将第一连杆43的水平转动转化为第三连杆46的末端的开合运动(即第三连杆46的杆体以与支架47活动连接的位置为支点,其末端相对于舵盘轴线向外张开或者向内合拢),通过第三连杆46的末端的开合运动可以控制气室出气导管35吹出的气流的方向。
34.在优选的示例中,支架47起支撑和连接偏转机构和连杆机构的作用,其形状只要不和转动过程中的第一连杆43产生干涉即可,第一连杆是弧形的,弧度为72
°
,在本例中,舵盘的偏转角度可以被控制为0-90
°
,第三连杆的末端相对于舵盘轴线的开合角度(即张角)在0-60
°
范围内。
35.在优选的实施例中,如图3所示,气室进气口为一个,但不限于一个,在其他示例中,还可以是具有其他数量的气室进气口,气室出气口有3-5个,本例中为5个,5个气室出气口等弧度(即等间距)分布于缓冲气室的侧面,连杆机构的数量与气室出气口相等,也为5个,一个气室出气导管35对应连接固定在一个第三连杆的末端上,使用连杆机构,仅需一个舵机转动就可以实现多路气流方向的改变。
36.在应用上述实施例中的末端执行器时,可以将末端执行器固定于具有rgb-d(即深度图像,深度图像=普通rgb三通道彩色图像 depth map(深度图))能力(例如在机械臂的末端搭载一个rgb-d深度摄像头)的六自由度(6dof)机械臂的末端,使得机械臂可以进行手眼协同的物体抓取和准确识别及定位,经过rgb-d图像检测和位姿生成,机械臂可以将末端执行器移动到合适位置再进行下一步操作,具体来说,工作过程包括如下步骤:
37.(1)机械臂根据rgb-d深度摄像头拍摄的草莓花朵和位置,将末端执行器移动到合适位置;
38.(2)末端执行器靠近一个目标草莓花朵,通过(type-c)接口12进行与机械臂进行
通信,机械臂发出命令后控制气泵2进行预定气体流量的气流输出以及控制舵机42旋转预定角度,舵机42旋转同时将带动舵盘41以同样的角速度旋转,进而带动第一连杆43转动,十字锁扣44及第二连杆45将第一连杆43的水平转动转化为第三连杆46相对于舵盘轴线的张合运动,从而带动固定于第三连杆46末端的气室出气导管35跟随第三连杆46末端张开预定角度,以控制气体的流向;
39.(3)气室出气导管35同时将气流精确吹到花药上使花药扬起,使其自主沉降在雌蕊上完成授粉,实现非接触地对雌蕊进行授粉。
40.本发明实施例中的末端执行器及授粉装置具有如下优点:
41.1、使用气流进行逐个非接触式授粉,使得花药沉降均匀,且不会有刚性物体直接接触草莓子房结构导致其破坏,提高了草莓的坐果率、降低了畸形果率。
42.2、由于草莓花的颜色为纯白色,雄蕊为亮黄色、枝叶及子房均为绿色,颜色的阈值相差大,因此使用rgb-d能很方便识别到花朵,进而机械臂能进行位姿调整准确达到花朵位置开启末端执行器进行授粉操作,且本发明实施例的末端执行器可进行气流大小及方向的调节,使得授粉时可以根据rgb-d进行适当的调整,将气流大小和方向针对不同的花朵达到各自合适的大小。
43.3、由于花朵数量众多,使用人工授粉费事费力,直接使用本发明进行重复性劳动,可以降低人工的使用。
44.本发明的背景部分可以包含关于本发明的问题或环境的背景信息,而不一定是描述现有技术。因此,在背景技术部分中包含的内容并不是申请人对现有技术的承认。
45.以上内容是结合具体/优选的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,其还可以对这些已描述的实施方式做出若干替代或变型,而这些替代或变型方式都应当视为属于本发明的保护范围。在本说明书的描述中,参考术语“一种实施例”、“一些实施例”、“优选实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。尽管已经详细描述了本发明的实施例及其优点,但应当理解,在不脱离专利申请的保护范围的情况下,可以在本文中进行各种改变、替换和变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
