1.本实用新型涉及地质勘测领域,提出一种勘察用多道瞬态面波仪器改进装置。
背景技术:
2.面波是地震波的一种,主要在地表传播,能量最大,波速约为3.8千米/秒,低于体波,往往最后被记录到。如果地震非常强烈,面波可能在震后围绕地球运行数日;面波实际上是体波在地表衍生而成的次生波。面波的传播较为复杂,既可以引起地表上下的起伏,也可以是地表做横向的剪切,其中剪切运动对建筑物的破坏最为强烈;在地震中,面波也是地震波之一,在地球表面扩散,因此测量面波震级也是除测量矩震级外的另一种估计地震规模的方法;因此面波的检测尤为重要;
3.而面波的检测环境比较复杂,不仅仅在平坦的地面,还有杂草地、表面复杂的岩石、地势比较陡峭的地方等,这些地方人工涉足比较危险,因此只能借助工具进行检测,现有的面波检测仪器中不能完全克服上述困难,因此导致检测不精确,需要多次重复测量,测量工作量大。
技术实现要素:
4.本实用新型提出一种勘察用多道瞬态面波仪器改进装置,通过设置伸缩装置和自动行走机构,使得自动行走机构能够脱离主机构带动检测仪去到地面路况比较复杂的地方,人工站在安全的地方操控即可,有效保证了工人安全,同时无需人工亲历检测,有效降低了劳动强度。
5.为了实现上述目的,本实用新型提出了一种勘察用多道瞬态面波仪器改进装置,包括:主机构、副机构、检测仪及接收仪,所述主机构包括主壳体、显示屏及蓄电池,所述蓄电池安装于所述主壳体内,所述显示屏设置于所述主壳体上,所述副机构可以安装在所述主壳体内、也可以拉出主壳体外,所述检测仪安装于所述副机构上,所述接收仪安装于所述主壳体上,所述副机构及接收仪均与所述蓄电池插拔连接;
6.所述副机构与所述主机构通过伸缩装置连接,所述副机构包括自动行走机构及除草机构,所述检测仪及除草机构均设置于所述自动行走机构上。
7.进一步,所述伸缩装置包括旋转电机、缠绕辊及缠绕线,所述旋转电机通过电机架安装于所述主壳体内,所述缠绕辊通过辊子架安装于所述主壳体内,所述缠绕辊与所述旋转电机的输出轴连接,所述缠绕线一端固定于所述缠绕辊上、另一端固定于所述自动行走机构上;
8.旋转电机与蓄电池电连接。
9.进一步,所述自动行走机构为飞行机构。
10.进一步,所述除草机构通过下放机构安装于所述自动行走机构上。
11.进一步,所述自动行走机构上设置有支撑架,所述下放机构包括下放电机、第一下放绳、第二下放绳及下放架,所述下放电机为双轴输出电机,所述双轴输出电机安装于所述
支撑架上,所述第一下放绳与所述第二下放绳的顶端分别固定于所述双轴输出电机的两端输出轴上、中部分别缠绕于所述双轴输出电机的两端输出轴上、底端固定于所述下放架上;
12.所述除草机构安装于所述下放架上。
13.进一步,所述支撑架上设置有四个气缸缸支撑腿。
14.进一步,所述除草机构包括除草电机及除草刀片,所述除草电机安装于所述下放架上,所述除草刀片通过套筒套装于所述除草电机的输出轴上。
15.更进一步,所述检测仪连接有伸缩气缸,所述伸缩气缸连接有旋转气缸,所述旋转气缸安装于所述自动行走机构下方。
16.本实用新型通过通过设置伸缩装置和自动行走机构,使得自动行走机构能够脱离主机构带动检测仪去到地面路况比较复杂的地方,人工站在安全的地方操控即可,有效保证了工人安全,同时无需人工亲历检测,有效降低了劳动强度。
附图说明
17.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
18.图1为本实用新型具体实施例中的一种勘察用多道瞬态面波仪器改进装置的整体结构示意图;
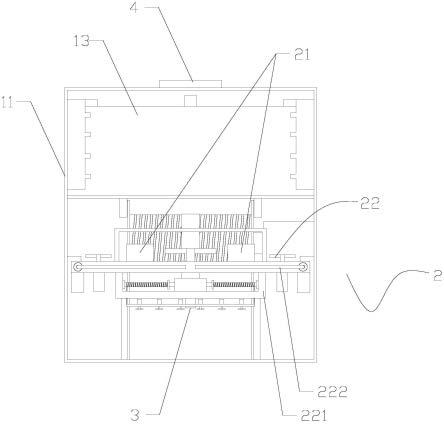
19.图2为图1所示的一种勘察用多道瞬态面波仪器改进装置的内部结构主视图;
20.图3为图2所示的一种勘察用多道瞬态面波仪器改进装置的去掉伸缩装置时的结构主视图;
21.图4为图2所示的一种勘察用多道瞬态面波仪器改进装置的去掉副机构时的结构主视图;
22.图5为图2所示的一种勘察用多道瞬态面波仪器改进装置的飞行机构的结构主视图;
23.图6为图2所示的一种勘察用多道瞬态面波仪器改进装置的副机构的下放机构的结构主视图;
24.图7为图5所示的飞行机构的部分结构示意图;
25.图8为图7所示的部分飞行器的气缸支撑腿支撑状态的结构主视图;
26.附图标记说明:主机构1;主壳体11;显示屏12;蓄电池13;飞行器支撑架14;零件箱15;开合门16;副机构2;充电池21;自动行走机构22;支撑架221;气缸缸支撑腿222;除草机构23;下放机构24;下放电机241;第一下放绳242;第二下放绳243;下放架244;检测仪3;伸缩气缸31;旋转气缸32;接收仪4;伸缩装置5;旋转电机51;缠绕辊52;缠绕线53。
具体实施方式
27.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用
新型保护的范围。
28.在本实用新型的具体实施例中,见图1-图8,一种勘察用多道瞬态面波仪器改进装置,包括:主机构1,所述主机构1包括主壳体11、显示屏12及蓄电池13,所述蓄电池13安装于所述主壳体11内,所述显示屏12设置于所述主壳体11上;
29.副机构2,主壳体11上设置开合门16,所述副机构2可以安装在所述主壳体11内、也可以拉出主壳体11外,副机构2包括充电池21,充电池21与蓄电池13插拔连接;
30.检测仪3,检测仪安装于所述副机构上;
31.接收仪4,所述接收仪4安装于所述主壳体11上,接收仪4与蓄电池13插拔连接。
32.在本实用新型的具体实施例中,见图1-图8,所述副机构2与所述主机构1通过伸缩装置5连接;
33.所述伸缩装置5包括旋转电机51、缠绕辊52及缠绕线53,所述旋转电机51通过电机架安装于所述主壳体11内,所述缠绕辊52通过辊子架安装于所述主壳体11内,所述缠绕辊52与所述旋转电机51的输出轴连接,所述缠绕线53一端固定于所述缠绕辊52上、另一端固定于所述自动行走机构22上;
34.旋转电机51与蓄电池13电连接;
35.旋转电机51只具有收卷功能,副机构2的外移通过自动行走机构22带动实现。
36.在本实用新型的具体实施例中,见图1-图8,所述副机构2还包括自动行走机构及除草机构23,所述自动行走机构22为飞行机构;所述充电池21、检测仪3及除草机构23均设置于所述自动行走机构22上,自动行走机构22、检测仪3及除草机构23均与充电池21电连接;
37.飞行机构22可以带动除草机构23与检测仪3移动,通过遥控器进行控制,使用时灵活多变,根据地形自主选择路线,更加稳定可靠。
38.在本实用新型的具体实施例中,见图1-图8,所述飞行机构22上设置有支撑架221,支撑架221为除草机构23与检测仪3提供支撑平台。
39.在本实用新型的具体实施例中,见图1-图8,所述除草机构23通过下放机构24安装于所述飞行机构22上;
40.当到达指定测量点时,如果地面有杂草,下放机构带动除草机构下移,将地面上的杂草清理掉,然后下放机构再将除草机构升起到原位置,清理完成后再进行检测工作。
41.在本实用新型的具体实施例中,见图1-图8,所述下放机构24包括下放电机241、第一下放绳242、第二下放绳243及下放架244,所述下放电机24为双轴输出电机,所述双轴输出电机安装于所述支撑架221上,所述第一下放绳242与所述第二下放绳243的顶端分别固定于所述双轴输出电机的两端输出轴上、中部分别缠绕于所述双轴输出电机的两端输出轴上、底端固定于所述下放架244上;
42.所述除草机构23安装于所述下放架244上;
43.下放电机与充电池电连接;
44.由于下放架244具有一定的重量,因此当下放电机241正转时,下放架244顺势下移,第一下放绳242与第二下放绳243的中部不会因为受力原因松箍,因此第一下放绳242与第二下放绳243下放时不会发生打结、缠绕等现象;
45.采用两根下放绳提升下放架更加稳定。
46.在本实用新型的具体实施例中,见图1-图8,为了提高检测时的稳定性,在所述支撑架221上设置有四个气缸缸支撑腿222,四个气缸支撑腿222与充电池21电连接,气缸支撑腿222是通过旋转气缸带动打开和收回;
47.当需要检测时,首先四个气缸支撑腿打开撑地,保证检测仪检测时更加稳定,使检测结果更加精确。
48.在本实用新型的具体实施例中,见图1-图8,所述除草机构23包括除草电机231及除草刀片232,所述除草电机231安装于所述下放架244上,所述除草刀片232通过套筒套装于所述除草电机231的输出轴上;
49.当然也可以增加吹风装置,将杂物吹散吹走,以便于更好的进行检测工作。
50.在本实用新型的具体实施例中,见图1-图8,所述检测仪3连接有伸缩气缸31,所述伸缩气缸31连接有旋转气缸32,所述旋转气缸32安装于所述自动行走机构22下方;
51.同时可以在自动行走机构22的下方设置检测仪容置槽,当伸缩气缸31处于收缩状态时,使得检测仪正好处于容置槽内,能够更好的保护检测仪。
52.在本实用新型的具体实施例中,见图1-图8,在防水、抗压效果能够达到的前提写,也可以进行海底测量;
53.且主壳体底部设置有行走轮,可以推着走。
54.在本实用新型的具体实施例中,见图1-图8,主壳体11内设置有飞行器支撑架14,飞行器支撑架14底部设置有零件箱15,零件箱15内设置有备用零件。
55.在本实用新型的具体实施例中,见图1-图8,工作前,首先检查各个部件,并将蓄电池充满电;
56.然后找到一处平坦安全的地方,将整个设备置于该底,然后打开主壳体上的开合门,将自动行走机构拿出,自动行走机构自动开启,人工使用遥控器使自动行走机构飞到测量地上方;
57.如果检测地上有杂草等杂物,先使下放机构工作,将下放架下放到位进行除草工作;
58.除草完成后,将下放架收起,然后四个气缸腿进行支撑,检测仪伸出进行检测,检测过程中,也可以将四个气缸腿收起,边移动边检测,进行大数据采集,采集完成后收回自动行走机构,完成一次检测;
59.同时自动行走机构上设置有摄像头等摄像设备,能够及时将检测地的环境发送给工作人员,便于工作人员根据实际情况进行操控;
60.整个检测过程,只需要人工站在安全的地方操控即可,非常安全。
61.实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此领域技术的人士能够了解本实用新型内容并加以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。