1.本发明涉及桩基分析技术领域,尤其是涉及一种用于海工三段式桩基的动力分析方法。
背景技术:
2.充分利用地球资源是科技发展的趋势,海上建设是人类发展的大趋势,而桩基被广泛用于支撑海上建筑。在海洋工程中,桩基一般呈三段式工况:第一段埋置土体中,主要受到土体的横向约束反力学(动力)作用;第二段在海水中,主要受到波浪动力荷载作用;第三段在空气中,主要受到横向风荷载作用,还有上部结构传给桩顶的荷载。现有技术中,海工桩基动力解析计算方法尚不够吻合实际工况且准确度很低。
技术实现要素:
3.本发明的目的是提供一种用于海工三段式桩基的动力分析方法,建立了海工三段式单桩的理论解析方法,并通过计算机数值仿真模型验证了解析方法的正确性,同时对影响桩基稳定的参数进行了敏感性分析,便于操作可行而且高效准确。
4.为实现上述目的,本发明提供了一种海工三段式桩基的动力分析方法,包括单桩力学模型的构建和单桩动力学方程的建立。
5.优选的,所述单桩力学模型的构建包括建立横向波浪、风荷载和桩侧土体的横向动反力。
6.优选的,建立桩侧土体的横向动反力r(z,t)方程,由于波浪和风荷载均为是循环荷载,故有r(z,t)=r(z,ω)e
iωt
,ω是循环变量激发频率,则方程进一步表示如下:
[0007][0008]
其中,为考虑了土体滞后阻尼βs的复剪切模量,nm为土体反力因子,um为桩横向位移振幅;
[0009]
φm为m阶土体谐振模式,m=1,2,3...,φm可由如下正弦函数表示:
[0010]
φm=sinamz;
[0011]
其中am=π(2m-1)/(2h)是边界值问题特征值,与m阶桩土系统谐振相关。且土体模式具有正交性:
[0012][0013]
nm由如下方程表示:
[0014][0015]
其中,y1′
(),y0′
()分别为一阶和零阶修正第二类贝塞尔函数。ηs和η
σ
为可压缩系
数,由如下公式得出:
[0016][0017]
频率相关的无量纲化参数sm由如下方程表示:
[0018][0019]
其中a0=ωd/vs为常用的无量纲化频率,vs为剪切波沿土体传播的速度,亦即剪切波速。
[0020]acutoff,m
为无阻尼土体介质中的截断频率,a
cutoff,m
=(2m-1)(π/2)(h/d)-1
,d为桩径。
[0021]
优选的,横向波浪荷载的建立如下:
[0022][0023]
式中:l
wl
为波浪波长,hw为波高;
[0024]
t为波浪周期;
[0025]
ρ为海水密度,取1030kg/m3;
[0026]
g为重力加速度,取9.8m/s2;
[0027]zw
为计算点距离海床的距离,静水面处为lw;
[0028]
lw为静水面处水深(不包括桩身埋入土部分),即为桩身处于水中的部分。
[0029]
j1为一阶第一类bessel函数,y1为一阶第二类bessel函数;
[0030]
α为相位角,且tgα=j1(πd/l
wl
)/y1(πd/l
wl
)。
[0031]
优选的,风荷载构建方法如下:风荷载分为两部分,上部结构传给桩基顶部的横向推力fw以及第三段受的分布荷载f
t
。桩基顶部的横向推力fw可由不同的上部结构提供。
[0032]
分布荷载f
t
为:
[0033]
其中,ρa为空气密度,通常取1.2~1.3kg/m3,vw为风速。
[0034]
具体计算时可以把风荷载简化为桩顶所受集中荷载和弯矩。
[0035]
优选的,建立横向位移的计算方法如下:
[0036]
在复合的横向波浪荷载和风荷载作用下,结构将产生横向位移。
[0037]
首先,分析桩身处于土体中的部分。
[0038]
考虑桩身一微元体沿水平方向的受力平衡,可得如下方程:
[0039]
[0040]
其中,e
p
为桩身的杨氏模量,i
p
为桩截面惯性矩i
p
=πd4/64,m
p
为桩身质量。上述方程中,w(z,ω)e
iωt
表示桩在动力情况下的位移,进一步表示如下:
[0041][0042][0043]
将横向土反力代入平衡方程,经过计算,得到位移的最终表达式如下:
[0044][0045]
其中,
[0046][0047][0048][0049][0050]
令
[0051]
由此可得出桩身位移表达式w(z,ω)。再由微分关系,可得到转角弯矩以及剪力沿桩身的分布。可表示为:
[0052][0053][0054]
显然,
[0055]
上述方程对于桩位于土体中的部分均成立。分别取z=h以及z=0,可将桩顶(土-水界面)处的位移矩阵同桩底的位移矩阵联系起来,得如下矩阵:
[0056][0057]
由此,已建立动力情况下,桩埋于土中部分、桩顶(水土交界处)和桩底间的位移矩阵。
[0058]
以下考虑桩伸出土体、位于水中的部分,推导桩处于水中部分的位移方程。
[0059]
由fw的表达式,易知zw=z,令:
[0060][0061]
易得:fw=q(z)e
iωt
。
[0062]
由于桩体处于水中,受到横向波浪荷载,且不再受到土体反力。考虑桩身一微元体沿水平方向的受力平衡,可以得到如下方程:
[0063][0064]
公式可进一步写为:
[0065][0066]
方程的解同样由齐次方程的通解和特解组成。齐次方程的解表示为wh,特解表示
为w
p
,方程的解即可表示为w=wh w
p
。
[0067]
齐次方程形式如下:
[0068][0069]
易得方程的通解同样为:
[0070]
wh(z,ω)=acosμz bsinμz ccoshμz dsinhμz
[0071]
其中a,b,c,d分别为积分常数,由桩身边界条件决定(处于水中的部分)。
[0072]
设w
p
=a
p
q(z),其中a
p
为待定系数。又由前q(z)方程可知:
[0073][0074]
代入微元体的平衡方程可得:
[0075][0076]
由上式得:则:
[0077]
方程的解w(z,ω)为:
[0078][0079]
得到位移表达式后,再由微分关系,根据方程可得到转角弯矩以及剪力沿桩身的分布情况。
[0080][0081]
写成矩阵形式:
[0082]
[0083][0084][0085]
可改写为:
[0086][0087]
上述方程对于桩位于水中的部分均成立。分别取z=lw以及z=0,可将桩顶(水-空界面)的位移矩阵同桩底(土-水界面)的位移矩阵联系起来,如下所示:
[0088][0089]
由此,已建立了动力情况下,桩位于水中部分,桩顶(水-空界面处)和桩底(水-土交界处)间的位移矩阵。将位于土体中的桩顶位移(水-土界面处)视为位于水中的桩底位移,即可结合两部分的桩身动力响应后得到的水-空界面处的的位移,转角,弯矩和剪力。
[0090]
将土-水界面的矩阵代入上式可得:
[0091][0092]
由于风荷载简化为桩顶所受集中荷载和弯矩,则第三段桩身可认为不受外力作用,其传递矩阵计算方法等同于{t2}。为表示区别,令空中部分的传递矩阵为{t3}。同理,分别取z=l
t
和z=0,可将桩顶的位移矩阵同桩底(水-空界面)的位移矩阵联系起来,如下所示:
[0093][0094]
将前式代入上式可得:
[0095][0096]
分别带入桩顶和桩底边界条件,即可求解出最终的桩顶位移。
[0097]
为考虑变截面的影响,将塔筒部分分为n段,设每段长度为h,设总的传递矩阵为{t
total
}:
[0098][0099]
则方程变为:
[0100][0101]
设第i段变截面的截面参数为e
p,i
,i
p,i
,m
p,i
,即可计算得出第i段变截面的参数μ的值,从而得到该段变截面的传递矩阵将i从1取到n,即可得到塔筒整体的传递矩阵{t
total
},代入以上方程即可得到桩顶的位移和相应的内力。
[0102]
因此,本发明采用上述一种用于海工三段式桩基的动力分析方法,建立了一种用于海工三段式桩基动力分析的解析计算方法,并通过计算机数值仿真模型验证了解析方法的正确性,便于操作可行而且高效准确。
[0103]
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
[0104]
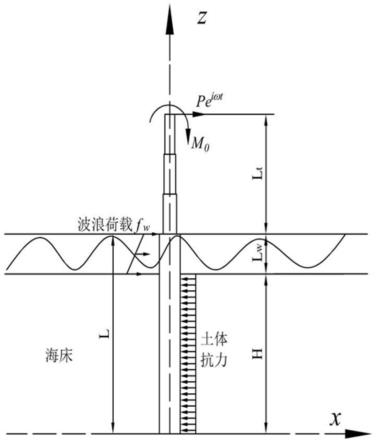
图1为本发明单桩力学模型简化图;
[0105]
图2为本发明实施例的有限元模型图;
[0106]
图3为本发明实施例的解析计算结果与有限元模拟对比图;
[0107]
图4为本发明实施例的第三段桩长度对结构的影响;
[0108]
图5为本发明实施例的第三段桩长度长度对结构的影响;
[0109]
图6为本发明实施例的第三段桩直径对结构的影响;
[0110]
图7为本发明实施例的第三段桩直径直径对结构的影响;
[0111]
图8为本发明实施例的第一、二段桩身直径对结构的影响;
[0112]
图9为本发明实施例的第一、二段桩身直径对结构的影响;
[0113]
图10为本发明实施例的土体弹性模量对结构的影响图;
[0114]
图11为本发明实施例的土体弹性模量对结构的影响图。
具体实施方式
[0115]
以下通过附图和实施例对本发明的技术方案作进一步说明。
[0116]
除非另外定义,本发明使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。
[0117]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的主旨或基本特征的情况下,能够以其它的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
[0118]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其它实施方式。这些其它实施方式也涵盖在本发明的保护范围内。
[0119]
还应当理解,以上所述的具体实施例仅用于解释本发明,本发明的保护范围并不限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明/发明的保护范围之内。
[0120]
本发明中使用的“包括”或者“包含”等类似的词语意指在该词前的要素涵盖在该词后列举的要素,并不排除也涵盖其它要素的可能。术语“内”、“外”、“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。在本发明中,除非另有明确的规定和限定,术语“附着”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。本发明中使用的术语“约”具有本领域技术人员公知的含义,优选指该术语所修饰的数值在其
±
50%,
±
40%,
±
30%,
±
20%,
±
10%,
±
5%或
±
1%范围内。
[0121]
本公开使用的所有术语(包括技术术语或者科学术语)与本公开所属领域的普通技术人员理解的含义相同,除非另外特别定义。还应当理解,在诸如通用词典中定义的术语应当被理解为具有与它们在相关技术的上下文中的含义相一致的含义,而不应用理想化或极度形式化的意义来解释,除非本文有明确地这样定义。
[0122]
对于相关领域普通技术人员已知的技术、方法和设备可能不作为详细讨论,但在
适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
[0123]
本发明说明书中引用的现有技术文献所公开的内容整体均通过引用并入本发明中,并且因此是本发明公开内容的一部分。
[0124]
实施例一
[0125]
一种用于海工三段式桩基的动力分析方法
[0126]
单桩力学模型简化图如图1,计算模型参数为:剪切波速vs=130m/s,桩径d=5m,桩埋进土体深度h=40m,浸入水中承受波浪荷载的长度为10m。第三段长度为30m,直径分别为3.2m、2.8m、2.4m。土体弹性模量es=30mpa,桩身弹性模量为e
p
=30gpa,泊松比νs=0.3,土体阻尼比βs=0.05,桩身密度ρ
p
=2400kg/m3,海水密度ρw=1030kg/m3。波高hw=3m,波长l
wl
=10m。桩顶部横向荷载为500kn,弯矩为1405kn
·
m。
[0127]
同时,采用abaqus有限元软件验证解析计算结果的准确性。通过abaqus子程序定义波浪荷载,均匀分为三段以模拟变截面,施加在桩身相应位置。为避免边界反射效应的影响,土体模型宽度取为20倍桩身直径,深度为80m,模型尺寸为100m
×
100m
×
80m。土体采用c3d8r单元,采用摩尔库伦模型。桩变截面处采用tie约束。对于桩身附近土体网格加密,对于第三段采取逐段加密,以保证计算精度。在相应位置处分别施加集中荷载和波浪荷载,波浪荷载通过子程序按公式计算结果取值。模型如图2所示。
[0128]
对模型进行模态分析,得到频率-塔筒顶部位移图、解析计算结果对比如图3所示。从图中可以看出,有限元模拟计算出的结构自振频率以及塔筒顶部位移的计算结果与上述计算结果吻合较好,尤其在最重要的结构自振频率和位移极值上十分吻合。由此验证本发明计算方法的正确性。
[0129]
定义桩顶顶水平动力柔度因子c
hh
为桩顶部横向位移和水平荷载幅值之比。
[0130]
首先,分析第三段桩长度对计算结果的影响。如图4-5所示,当频率接近结构自振频率时,结构柔度极大,对于海工桩基础十分不利。从图中还可以看出,结构自振频率和柔度对塔筒长度变化十分敏感。随着塔筒长度减少,结构自振频率后延,柔度下降,结构更趋于稳定。实际工程中,应注意控制第三段桩长度,防止结构自振频率降低以及柔度提高。
[0131]
通过分析波浪荷载对计算结果的影响发现,波浪荷载对结构的频率几乎没有影响。随着第三段桩长度减小,波浪荷载对结构柔度的影响逐渐明显。对比结构在自振频率时考虑波浪荷载和不考虑波浪荷载时的柔度因子实部和虚部,如表1所示。
[0132]
表1波浪荷载对结构的影响
[0133][0134]
图6-7为第三段桩直径对于计算结果的影响。计算中,桩基直径保持不变,对于变截面桩直径分别乘以0.9,1以及1.1的系数α。随着第三段桩直径增加,结构自振频率后移,而结构柔度基本保持不变。
[0135]
图8-9为下面桩身(第一、二段)直径对计算结果的影响。计算中,保持第三段桩直径不变,桩身直径分别设置为5m、5.5m和6m。改变桩身直径对结构柔度影响较大。随着桩身
直径增大,结构柔度有明显下降。
[0136]
图10-11为土体弹性模量对计算结果的影响。结构自振频率对土体模量敏感性较强,随着土体弹性模量增加,结构自振频率后移,柔度略有上升,但上升趋势逐渐变缓。实际工程中,应进行土体弹性模量对结构自振频率的影响评估,采取相应加固措施。
[0137]
因此,本发明采用上述一种用于海工三段式桩基的动力分析方法,建立了一种用于海工三段式桩基动力分析的解析计算方法,并通过计算机数值仿真模型验证了解析方法的正确性,便于操作可行而且高效准确。
[0138]
最后应说明的是:以上实施例仅用以说明本发明的技术方案而非对其进行限制,尽管参照较佳实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对本发明的技术方案进行修改或者等同替换,而这些修改或者等同替换亦不能使修改后的技术方案脱离本发明技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。