1.本发明涉及连铸机检测技术领域,具体来说,涉及一种结晶器振动偏摆检测装置、检测方法及检测系统。
背景技术:
2.连铸机生产中结晶器及其振动是核心设备,正常状态下,振动台结晶器安装面应该跟随设计轨迹做上下仿弧运动.否则可能导致横向、纵向裂纹和角裂,以及坯壳粘接漏钢等严重事故。横向和纵向偏摆应该尽可能小,尤其是横向偏摆过大,会导致横向和纵向裂纹,以及卷渣。振动台在组装完成后体积庞大,很难测出设计要求的精确尺寸,且在使用过程中因设备磨损无法进行相关数据测量,生产过程中设备的好坏无法确定,因此,能进行在线检测的振动偏摆检测仪十分必要。
3.针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现要素:
4.本发明的目的是提出一种结晶器振动偏摆检测装置、检测方法及检测系统,以解决现有相关技术所存在的上述技术问题。
5.本发明的技术方案是这样实现的:
6.根据本发明的一方面,提供了一种结晶器振动偏摆检测装置。
7.该结晶器振动偏摆检测装置包括:
8.底座;
9.外壳,所述外壳与所述底座相配合,位于所述底座的上方;
10.三轴加速度传感器,位于所述外壳内,且所述三轴加速度传感器的三个加速度传感计分别固定在所述外壳内壁上,并与结晶器的x轴、y轴、z轴方向相互平行;
11.计算机,位于所述外壳内且与所述底座固定连接,用于接收所述三轴加速传感器所采集的加速度数据,根据所述加速度数据确定结晶器x轴、y轴、z轴方向的振动位移幅度、振动位移周期以及振动位移频率,并根据所述振动位移幅度、所述振动位移周期以及所述振动位移频率,确定对应的结晶器振动偏摆数据和振动曲线,且还用于上传和/或显示述振动位移幅度、所述振动位移周期、所述振动位移频率、所述结晶器振动偏摆数据和振动曲线;
12.蓄电池,位于所述外壳内且与所述底座固定连接,用于对所述计算机和所述三轴加速度传感器提供电源。
13.此外,该结晶器振动偏摆检测装置还包括:调平装置,设置于所述底座上,且位于所述外壳的外侧,用于对结晶器振动偏摆检测装置进行水平度进行调整;水平仪,设置于所述外壳的顶端,用于对结晶器振动偏摆检测装置的水平度进行检测。
14.其中,所述调平装置包括:固定柱,所述固定柱通过固定座安装于所述底座上,且所述固定柱的底端贯穿所述底座,所述固定柱的底端与所述底座的底端齐平,所述固定柱
的中部具有贯穿的空腔;调整螺杆,位于所述固定柱的空腔内,并通过螺纹与所述固定柱的空腔活动连接;旋转件,位于所述调整螺杆的顶端,并与所述调整螺杆固定连接。
15.另外,该结晶器振动偏摆检测装置还包括:控制开关,位于所述外壳的顶端,用于控制所述三轴加速度传感器、所述计算机及所述蓄电池;充电口,位于所述所述外壳的顶端,用于为所述蓄电池提供充电接口;天线,位于所述外壳的顶端,并与所述计算机通信连接,用于为所述计算机提供传输路径;提手,位于所述外壳的顶端,并与所述外壳固定连接。
16.根据本发明的另一方面,提供了一种结晶器振动偏摆检测方法。
17.该结晶器振动偏摆检测方法包括:
18.接收预先配置的三轴加速度传感器所采集的结晶器x轴、y轴、z轴方向的加速度数据;
19.根据所述加速度数据确定结晶器x轴、y轴、z轴方向的振动位移幅度、振动位移周期以及振动位移频率;
20.根据所述振动位移幅度、所述振动位移周期以及所述振动位移频率,确定对应的结晶器振动偏摆数据和振动曲线;
21.上传和/或显示述振动位移幅度、所述振动位移周期、所述振动位移频率、所述结晶器振动偏摆数据和振动曲线。
22.可选的,所述显示的显示方式为三维显示图显示、和/或频谱分析图显示。
23.此外,根据所述加速度数据确定结晶器x轴、y轴、z轴方向的振动位移幅度、振动位移周期以及振动位移频率包括:对所述加速度数据进行预处理,得到速度数据,并对速度数据进行积分处理,得到位移数据;根据所述位移数据,采用傅里叶变换法确定振动位移幅度和振动位移周期,并根据振动位移周期,确定振动位移频率。
24.另外,对所述加速度数据进行预处理包括:
25.通过预先配置的低通滤波器,对所述加速度数据进行低通滤波,去除加速度数据中的重力加速度分量,并对低通滤波后的数据进行卡尔曼滤波,得到滤波后的加速度数据;
26.对滤波后的加速度数据采用傅里叶变换法确定震动装置的震动频率,并根据该震动频率,通过非线性补偿函数,计算得到低通滤波的信号幅值衰减比例系数及信号滞后的相位;并利用低通滤波的信号幅值衰减比例系数及信号滞后的相位,对滤波后的加速度数据进行矫正,得到矫正后的加速度数据;
27.对矫正后的加速度数据进行积分处理,得到速度数据;
28.通过预先配置的高通滤波器和低通滤波器,对所述速度数据进行滤波处理,得到滤波后的速度数据;并根据所述震动频率,通过非线性补偿函数,计算得到高通滤波的信号幅值衰减比例系数及信号滞后的相位;利用高通滤波的信号幅值衰减比例系数及信号滞后的相位,对滤波后的速度数据进行矫正,得到矫正后的速度数据。
29.根据本发明的又一方面,提供了一种结晶器振动偏摆检测系统。
30.该结晶器振动偏摆检测系统包括:
31.数据接收模块,用于接收预先配置的三轴加速度传感器所采集的结晶器x轴、y轴、z轴方向的加速度数据;
32.数据处理模块,用于根据所述加速度数据确定结晶器x轴、y轴、z轴方向的振动位移幅度、振动位移周期以及振动位移频率;
33.偏摆及曲线确定模块,用于根据所述振动位移幅度、所述振动位移周期以及所述振动位移频率,确定对应的结晶器振动偏摆数据和振动曲线;
34.上传和/或显示模块,用于上传和/或显示述振动位移幅度、所述振动位移周期、所述振动位移频率、所述结晶器振动偏摆数据和振动曲线。
35.可选的,所述显示的显示方式为三维显示图显示、和/或频谱分析图显示。
36.此外,所述数据处理模块包括数据预处理子模块、数据计算子模块,其中,所述数据预处理子模块,用于对所述加速度数据进行预处理,得到速度数据,并对速度数据进行积分处理,得到位移数据;所述数据计算子模块,用于根据所述位移数据,采用傅里叶变换法确定振动位移幅度和振动位移周期,并根据振动位移周期,确定振动位移频率。
37.另外,对所述加速度数据进行预处理包括:
38.通过预先配置的低通滤波器,对所述加速度数据进行低通滤波,去除加速度数据中的重力加速度分量,并对低通滤波后的数据进行卡尔曼滤波,得到滤波后的加速度数据;
39.对滤波后的加速度数据采用傅里叶变换法确定震动装置的震动频率,并根据该震动频率,通过非线性补偿函数,计算得到低通滤波的信号幅值衰减比例系数及信号滞后的相位,利用低通滤波的信号幅值衰减比例系数及信号滞后的相位,对滤波后的加速度数据进行矫正,得到矫正后的加速度数据;
40.对矫正后的加速度数据进行积分处理,得到速度数据;
41.通过预先配置的高通滤波器和低通滤波器,对所述速度数据进行滤波处理,得到滤波后的速度数据,并根据所述震动频率,通过非线性补偿函数,计算得到高通滤波的信号幅值衰减比例系数及信号滞后的相位,利用高通滤波的信号幅值衰减比例系数及信号滞后的相位,对滤波后的速度数据进行矫正,得到矫正后的速度数据。
42.有益效果:
43.本发明采用三轴加速度传感器的非接触检测法,具有很高的灵敏度和精度,检测过程中传感器安装方便,无磨损,检测时,加速度传感器的加速度信号通过二次积分转换成位移信号,然后根据位移信号计算振动参数(振幅,振频,偏摆等),并分析振动曲线,为查找故障原因提供依据。可以实时的检测结晶器的振动情况,振频、振幅和振动曲线变化的过程,进而判断传动系统磨损、导向系统偏差等故障,对铸坯的质量和拉速的提高有重要的意义。
附图说明
44.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
45.图1是根据本发明实施例的一种结晶器振动偏摆检测装置的整体结构图;
46.图2是根据本发明实施例的一种结晶器振动偏摆检测装置的整体结构透视图;
47.图3是根据本发明实施例的一种结晶器振动偏摆检测装置的结构分解示意图;
48.图4是根据本发明实施例的一种结晶器振动偏摆检测方法流程示意图;
49.图5是根据本发明实施例的一种结晶器振动偏摆检测系统的结构框图。
具体实施方式
50.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
51.根据本发明的实施例,提供了一种结晶器振动偏摆检测装置、检测方法及检测系统。
52.如图1-3所示,根据本发明实施例的一种结晶器振动偏摆检测装置包括:
53.底座1;
54.外壳2,所述外壳2与所述底座1相配合,位于所述底座1的上方;
55.三轴加速度传感器3,位于所述外壳2内,且所述三轴加速度传感器的三个加速度传感计(x轴加速度传感计301、y轴加速度传感计302、z轴加速度传感计303)分别固定在所述外壳2内壁上,并与结晶器的x轴、y轴、z轴方向相互平行;
56.计算机4,位于所述外壳2内且与所述底座1固定连接,用于接收所述三轴加速传感器3所采集的加速度数据,根据所述加速度数据确定结晶器x轴、y轴、z轴方向的振动位移幅度、振动位移周期以及振动位移频率,并根据所述振动位移幅度、所述振动位移周期以及所述振动位移频率,确定对应的结晶器振动偏摆数据和振动曲线,且还用于上传和/或显示述振动位移幅度、所述振动位移周期、所述振动位移频率、所述结晶器振动偏摆数据和振动曲线;
57.蓄电池5,位于所述外壳2内且与所述底座1固定连接,用于对所述计算机4和所述三轴加速度传感器3提供电源。
58.在一个实施例中,如图1-3所示,该结晶器振动偏摆检测装置还包括:调平装置6,设置于所述底座1上,且位于所述外壳2的外侧,用于对结晶器振动偏摆检测装置进行水平度进行调整;水平仪7,设置于所述外壳2的顶端,用于对结晶器振动偏摆检测装置的水平度进行检测。其中,所述调平装置6包括:固定柱601,所述固定柱601通过固定座602安装于所述底座1上,且所述固定柱601的底端贯穿所述底座1,所述固定柱601的底端与所述底座1的底端齐平,所述固定柱601的中部具有贯穿的空腔;调整螺杆603,位于所述固定柱601的空腔内,并通过螺纹与所述固定柱601的空腔活动连接;旋转件604,位于所述调整螺杆603的顶端,并与所述调整螺杆603固定连接。
59.在一个实施例中,如图1-3所示,该结晶器振动偏摆检测装置还包括:控制开关8,位于所述外壳2的顶端,用于控制所述三轴加速度传感器3、所述计算机4及所述蓄电池5;充电口9,位于所述所述外壳2的顶端,用于为所述蓄电池5提供充电接口;天线10,位于所述外壳2的顶端,并与所述计算机4通信连接,用于为所述计算机4提供传输路径;提手11,位于所述外壳2的顶端,并与所述外壳2固定连接。
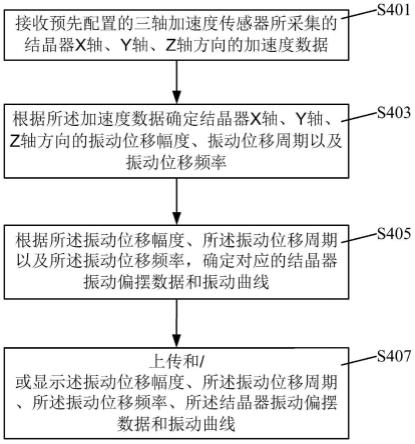
60.如图4所示,根据本发明实施例的一种结晶器振动偏摆检测方法包括:
61.步骤s401,接收预先配置的三轴加速度传感器所采集的结晶器x轴、y轴、z轴方向的加速度数据;
62.步骤s403,根据所述加速度数据确定结晶器x轴、y轴、z轴方向的振动位移幅度、振动位移周期以及振动位移频率;
63.步骤s405,根据所述振动位移幅度、所述振动位移周期以及所述振动位移频率,确定对应的结晶器振动偏摆数据和振动曲线;
64.步骤s407,上传和/或显示述振动位移幅度、所述振动位移周期、所述振动位移频率、所述结晶器振动偏摆数据和振动曲线。
65.在一个实施例中,所述显示的显示方式为三维显示图显示、和/或频谱分析图显示。此外,在根据所述加速度数据确定结晶器x轴、y轴、z轴方向的振动位移幅度、振动位移周期以及振动位移频率时,先对所述加速度数据进行预处理,得到速度数据,并对速度数据进行积分处理,得到位移数据;再根据所述位移数据,采用傅里叶变换法确定振动位移幅度和振动位移周期,并根据振动位移周期,确定振动位移频率。
66.而其中对所述加速度数据进行预处理则包括:通过预先配置的低通滤波器,对所述加速度数据进行低通滤波,去除加速度数据中的重力加速度分量,并对低通滤波后的数据进行卡尔曼滤波,得到滤波后的加速度数据;对滤波后的加速度数据采用傅里叶变换法确定震动装置的震动频率,并根据该震动频率,通过非线性补偿函数,计算得到低通滤波的信号幅值衰减比例系数及信号滞后的相位;并利用低通滤波的信号幅值衰减比例系数及信号滞后的相位,对滤波后的加速度数据进行矫正,得到矫正后的加速度数据;对矫正后的加速度数据进行积分处理,得到速度数据;通过预先配置的高通滤波器和低通滤波器,对所述速度数据进行滤波处理,得到滤波后的速度数据;并根据所述震动频率,通过非线性补偿函数,计算得到高通滤波的信号幅值衰减比例系数及信号滞后的相位;利用高通滤波的信号幅值衰减比例系数及信号滞后的相位,对滤波后的速度数据进行矫正,得到矫正后的速度数据。
67.具体应用,具体流程则如下所示:
68.1、下位机收到上位机的数据采集指令后启动三轴加速度传感器采集4秒的加速度数据,对数据进行低通滤波并去除加速度数据中的重力加速度分量,然后再进行卡尔曼滤波,得到滤波后的加速度数据a
x
,ay,az。
69.2、根据加速度数据使用遍历搜索确定震动信号极值点的时间t
amaxi
(i=1,
…
,n)和t
aminj
(i=1,
…
,m),然后通过相邻的极值点的时间计算信号的振荡周期t
ak
(k=1,
…
,n,n<m,否则k=1,
…
m),通过求取均值的方式确定信号周期ta,进而确定震动装置的震动频率fa。
70.3、通过非线性补偿函数计算低通滤波器造成的信号幅值衰减比例系数a
lp
和信号滞后的相位使用a
lp
和对a
x
,ay,az进行幅值矫正和相位补偿得到矫正后的加速度数据a
x2
,a
y2
,a
z2
;其中,此时的非线性补偿函数公式为:
[0071][0072]
其中,f
in
为输入信号的频率,a
lp
为低通滤波器造成的信号幅值衰减的比例系数,为低通滤波器造成的信号滞后的相位,f
lp
为非线性补偿函数;在实际计算时,将震动频率fa作为输入信号的频率进行输入。
[0073]
4、对a
x2
,a
y2
,a
z2
进行积分,得到三个方向的速度数据,然后对数据进行高通滤波和低通滤波得到滤波后的速度数据v
x
,vy,vz。并非线性补偿函数计算高通滤波器造成的信号幅值衰减比例系数a
hp
和信号滞后的相位使用a
lp
,a
hp
和和对v
x
,vy,vz进行幅值矫正
和相位补偿得到矫正后的速度数据v
x2
,v
y2
,v
z2
,其中,此时的非线性补偿函数公式为:
[0074][0075]
其中,f
in
为输入信号的频率,a
hp
为高通滤波器造成的信号幅值衰减的比例系数,为高通滤波器造成的信号滞后的相位,f
lp
为非线性补偿函数;在实际计算时,将震动频率fa作为输入信号的频率进行输入。
[0076]
5、对v
x2
,v
y2
,v
z2
进行积分,得到三个方向的位移数据,然后对数据进行高通滤波得到滤波后的位移数据x
x
,xy,xz。使用a
hp
和对x
x
,xy,xz进行幅值矫正和相位补偿得到矫正后的位移数据x
x2
,x
y2
,x
z2
。
[0077]
6、通过遍历搜索x
x2
,x
y2
,x
z2
的极值点x
xmaxi
,x
ymaxi
,x
zmaxi
(i=1,
…
,n)和x
xminj
,x
yminj
,x
zminj
(j=1,
…
,m),和z轴极值点对应对的时间t
maxi
和t
minj
。根据相邻极值点计算出位移信号的幅值a
xk
,a
yk
,a
zk
和周期t
sk
(若n>m,k=1,
…
,m,否则k=1,
…
,n)。
[0078]
7、对a
xk
,a
yk
,a
zk
和t
sk
进行坏值剔除,然后剩余值通过求均值的方式确定三个方向的震动位移的幅值a
sx
,a
sy
,a
sz
和震动的周期ts,然后通过震动周期确定信号的震动频率fs。
[0079]
8、等待上位机的上传指令,将计算的震动位移,震动幅值和震动频率数据上传显示。
[0080]
如图5所示,根据本发明实施例的一种结晶器振动偏摆检测系统包括:
[0081]
数据接收模块501,用于接收预先配置的三轴加速度传感器所采集的结晶器x轴、y轴、z轴方向的加速度数据;
[0082]
数据处理模块503,用于根据所述加速度数据确定结晶器x轴、y轴、z轴方向的振动位移幅度、振动位移周期以及振动位移频率;
[0083]
偏摆及曲线确定模块505,用于根据所述振动位移幅度、所述振动位移周期以及所述振动位移频率,确定对应的结晶器振动偏摆数据和振动曲线;
[0084]
上传和/或显示模块507,用于上传和/或显示述振动位移幅度、所述振动位移周期、所述振动位移频率、所述结晶器振动偏摆数据和振动曲线。
[0085]
在一个实施例中,所述显示的显示方式为三维显示图显示、和/或频谱分析图显示。此外,所述数据处理模块503包括数据预处理子模块(图中未示出)、数据计算子模块(图中未示出),其中,所述数据预处理子模块(图中未示出),用于对所述加速度数据进行预处理,得到速度数据,并对速度数据进行积分处理,得到位移数据;所述数据计算子模块(图中未示出),用于根据所述位移数据,采用傅里叶变换法确定振动位移幅度和振动位移周期,并根据振动位移周期,确定振动位移频率。
[0086]
具体的,对所述加速度数据进行预处理包括:通过预先配置的低通滤波器,对所述加速度数据进行低通滤波,去除加速度数据中的重力加速度分量,并对低通滤波后的数据进行卡尔曼滤波,得到滤波后的加速度数据;对滤波后的加速度数据采用傅里叶变换法确定震动装置的震动频率,并根据该震动频率,通过非线性补偿函数,计算得到低通滤波的信号幅值衰减比例系数及信号滞后的相位,利用低通滤波的信号幅值衰减比例系数及信号滞后的相位,对滤波后的加速度数据进行矫正,得到矫正后的加速度数据;对矫正后的加速度数据进行积分处理,得到速度数据;通过预先配置的高通滤波器和低通滤波器,对所述速度数据进行滤波处理,得到滤波后的速度数据,并根据所述震动频率,通过非线性补偿函数,
计算得到高通滤波的信号幅值衰减比例系数及信号滞后的相位,利用高通滤波的信号幅值衰减比例系数及信号滞后的相位,对滤波后的速度数据进行矫正,得到矫正后的速度数据。
[0087]
综上所述,借助于本发明的上述技术方案,本发明采用三轴加速度传感器的非接触检测法,具有很高的灵敏度和精度,检测过程中传感器安装方便,无磨损,检测时,加速度传感器的加速度信号通过二次积分转换成位移信号,然后根据位移信号计算振动参数(振幅,振频,偏摆等),并分析振动曲线,为查找故障原因提供依据。可以实时的检测结晶器的振动情况,振频、振幅和振动曲线变化的过程,进而判断传动系统磨损、导向系统偏差等故障,对铸坯的质量和拉速的提高有重要的意义。
[0088]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。