技术特征:
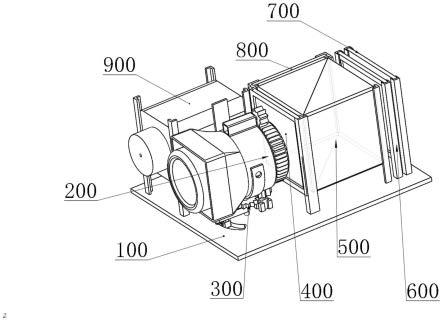
1.一种基于机器视觉的可调焦微动云台式激光测距仪,其特征在于:包括主体(100),所述主体(100)上设置有激光发射模块(900)、调焦模块(200)、微动云台模块(300)、液晶模块(400)、分光模块(500)、图像数据信息采集模块(600)、光敏传感器模块(800)以及控制系统(700);所述激光发射模块(900)用于发射激光;所述调焦模块(200)用于对反射光进行自动调焦和聚焦;所述微动云台模块(300)用于对调焦模块(200)进行角度微调;所述液晶模块(400)用于屏蔽非目标点杂光;所述分光模块(500)用于将光束传递给图像数据信息采集模块(600)与光敏传感器模块(800);所述图像数据信息采集模块(600)用于对光束进行感光处理;所述光敏传感器模块(800)用于感知激光;所述控制系统(700)用于控制各个模块以及分析计算处理数据信息。2.根据权利要求1所述的基于机器视觉的可调焦微动云台式激光测距仪,其特征在于:所述调焦模块(200)包括外镜筒(215)与内镜筒(214),所述外镜筒(215)和内镜筒(214)之间通过内外螺纹连接,所述外镜筒(215)内设置有第一凸透镜(231)和第二凸透镜(232),所述内镜筒(214)内设置有第三凸透镜(233);所述外镜筒(215)外侧设置有第一步进电机(211),所述第一步进电机(211)输出端上设置有第一齿轮(212),所述内镜筒(214)端部套设有第二齿轮(213),所述第一齿轮(212)与第二齿轮(213)相啮合;所述第一步进电机(211)能够驱使第一齿轮(212)转动并带动第二齿轮(213)转动,进而带动内镜筒(214)转动,从而使外镜筒(215)相对内镜筒(214)移动。3.根据权利要求2所述的基于机器视觉的可调焦微动云台式激光测距仪,其特征在于:所述调焦模块(200)还包括设置于外镜筒(215)前端的滤光模块(220),所述滤光模块(220)用于滤除杂光。4.根据权利要求1所述的基于机器视觉的可调焦微动云台式激光测距仪,其特征在于:所述微动云台模块(300)设置在调焦模块(200)底部,所述微动云台模块(300)包括安装在主体(100)上的第三步进电机(331)以及转动安装在主体(100)上的转轴(321),所述第三步进电机(331)输出端设置有第三齿轮(332),所述转轴(321)上设置有第四齿轮(333),所述第四齿轮(333)与第三齿轮(332)相啮合;所述第三步进电机(331)能够驱使第三齿轮(332)转动并带动第四齿轮(333)转动,进而带动转轴(321)转动以控制调焦模块(200)水平旋转。5.根据权利要求4所述的基于机器视觉的可调焦微动云台式激光测距仪,其特征在于:所述微动云台模块(300)还包括固接于转轴(321)上的连接杆(320),安装在连接杆(320)底部的第二步进电机(316),转动安装在连接杆(320)端部的螺纹伸缩杆(313),以及转动连接在螺纹伸缩杆(313)顶端的滑块(311);所述第二步进电机(316)输出端设置有第二锥齿轮(315),所述螺纹伸缩杆(313)底端设置有第一锥齿轮(314),所述第一锥齿轮(314)与第二锥齿轮(315)相啮合;所述转轴(321)顶端还设置有u形支撑架(334),所述调焦模块(200)转动安装在u形支
撑架(334)上,所述调焦模块(200)底端还设置有滑轨(310),所述滑块(311)滑动卡接在滑轨(310)上;所述第二步进电机(316)能够驱使第二锥齿轮(315)转动并带动第一锥齿轮(314)转动,进而带动螺纹伸缩杆(313)下半部转动转化为上半部上下伸缩移动,从而控制调焦模块(200)上下旋转。6.根据权利要求1-5任一项所述的基于机器视觉的可调焦微动云台式激光测距仪,其特征在于:所述控制系统(700)包括终端控制器(710)以及共同受控于终端控制器(710)的图像数据接收及分析单元(720)、电机控制单元(730)、液晶选择单元(740)、时间计算单元(750)、数据信息显示单元(760);当激光反射回来时,所述图像数据信息采集模块(600)能够将光信号转换为电信号传输给图像数据接收及分析单元(720),所述图像数据接收及分析单元(720)将对像素点进行分析,解析出激光强度与激光在被测物表面形状数据;所述电机控制单元(730)能够控制微动云台模块(300)工作,进而对调焦模块(200)进行微调;微调结束后,所述电机控制单元(730)能够控制调焦模块(200)进行调焦和聚焦,使其焦距从最短延伸至最长,并记录激光强度随焦距长度变化的数据,选择数据中激光强度最大的焦距,然后控制调焦模块(200)调回到该焦距位置;根据所述图像数据接收及分析单元(720)解析出的激光在被测物表面形状数据,捕捉该形状的近似中心,随后控制液晶模块(400)选择该中心区域透光,其余面积的液晶均成黑色遮光;上述工作完成后,所述时间计算单元(750)将控制激光发射模块(900)发射激光脉冲,并接收光敏传感器模块(800)的电平变化,记录激光发射到光敏传感器模块(800)感知到激光的时间,多次重复操作,取平均值。7.根据权利要求1-5任一项所述的基于机器视觉的可调焦微动云台式激光测距仪,其特征在于:所述分光模块(500)位于调焦模块(200)后方,所述分光模块(500)采用分光片,能够将聚焦的光线分成两份,一份沿直线照射到所述图像数据信息采集模块(600),另一份折射到所述光敏传感器模块(800)。8.根据权利要求1-5任一项所述的基于机器视觉的可调焦微动云台式激光测距仪,其特征在于:所述图像数据信息采集模块(600)位于分光模块(500)后方,所述图像数据信息采集模块(600)采用能够感光的电荷耦合器感光器件,所述电荷耦合器感光器件能够根据被测量目标反射的光线成像并将成像结果传输到控制系统(700)进行判断。9.根据权利要求1-5任一项所述的基于机器视觉的可调焦微动云台式激光测距仪,其特征在于:所述光敏传感器模块(800)位于分光模块(500)侧方,所述光敏传感器模块(800)采用雪崩光电二极管,所述雪崩光电二极管能够感知被测量目标反射的光线并将感知结果通过高低电平的形式传输到控制系统(700)进行判断。
技术总结
本发明公开了一种基于机器视觉的可调焦微动云台式激光测距仪,它包括主体,所述主体上设置有激光发射模块、调焦模块、微动云台模块、液晶模块、分光模块、图像数据信息采集模块、光敏传感器模块以及控制系统;激光发射模块用于发射激光;调焦模块用于对反射光进行自动调焦和聚焦;微动云台模块用于对调焦模块进行角度微调;液晶模块用于屏蔽非目标点杂光;分光模块用于将光束传递给图像数据信息采集模块与光敏传感器模块;图像数据信息采集模块用于对光束进行感光处理;光敏传感器模块用于感知激光;控制系统用于控制各个模块以及分析计算处理数据信息。本发明应用场景广泛,操作便捷,响应快,精度高,无需多人参与,自动化程度高。度高。度高。
技术研发人员:陶彬彬 汝俊杰 王世杰
受保护的技术使用者:皖江工学院
技术研发日:2022.02.24
技术公布日:2022/6/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。