技术特征:
1.基于深度学习的有源数字阵列雷达实时故障诊断方法,包括以下步骤:s1、获取有源数字阵列雷达整机和分系统历史观测数据,而历史观测数据为有源数字阵列雷达的历史工作状态数据、业务数据、机内自检数据;s2、采用有源数字阵列雷达整机和分系统历史观测数据构建训练集,对深度学习模型进行训练,得到该有源数字阵列雷达整机和分系统的故障深度学习模型;s3、采用有源数字阵列雷达故障深度学习模型对实时采集的工作观测数据进行预测,得到下一个时间序列的预测结果;s4、将下一个时间序列的实际测量数据与预测结果通过最小均方误差进行计算,得到真实值与预测值之间的误差;s5、判断真实值与预测值之间的误差是否满足预设的阀值范围,满足,则进行故障诊断程序;否则,重复步骤s3~s5。2.根据权利要求1所述的基于深度学习的有源数字阵列雷达实时故障诊断方法,其特征在于,所述步骤s3的具体训练方法为:s31、建立基于时间序列的深度学习模型,其中,深度学习模型可采用自定义batch方法对训练数据进行训练,所述基于时间序列的深度学习模型包括第一个lstm层、第一个dropout层、第二个lstm层、第三个lstm层、第二个dropout层和全连接层;s32、初始化基于时间序列的深度学习模型内各层输入维度、神经元个数、第一个dropout层和第二个dropout层的数据抛弃率;所述输入维度为m
×
n,其中,m为基于时间序列的深度学习模型滑动窗口大小,n为整机或者分系统的观测数据的特征属性;滑动窗口大小取为有源数字阵列雷达整机和分系统特征的变化周期;神经元个数取为滑动窗口大小的整数倍;s33、采用基于时间序列的深度学习算法,循环将训练集数据输入到深度学习模型,深度学习模型按照用户自定义模式设置激活函数、优化函数、隐层节点数,验证数据分割比,训练批次,每批数据量对训练数据进行学习,得到各层的权重、偏执和深度学习模型的输出数据,将深度学习模型的输出数据与实际数据进行比较,并统计两者的最小均方误差值,直到执行完预设的循环次数,其中,训练集内的数据为无故障标签数据;数据特征权重可采用动态方法进行调整,初始设置学习率为常值,当多次循环均方误差值始终保持在一定的范围内不变时,得到拟合模型;s34、当最小均方误差值超过预设的模型误差阈值时,调整学习率,重新执行步骤s33~s34,直到最小均方误差值小于预设的模型误差阈值,从而确定基于时间序列的深度学习模型。3.根据权利要求2所述的基于深度学习的有源数字阵列雷达实时故障诊断方法,其特征在于还包括以下步骤:s35、将验证集数据输入到步骤s34确定的基于时间序列的深度学习模型,将深度学习模型的输出数据与实际数据进行比较,并统计两者的均方误差值;s36、当步骤s35得到的均方误差值大于预设的模型误差阈值,则认为步骤s34确定的基于时间序列的深度学习模型过拟合,调整学习率,重新执行步骤s33~s35,否则,将步骤s34确定的基于时间序列的深度学习模型确定为最终的深度学习模型。4.根据权利要求2所述的基于深度学习的有源数字阵列雷达实时故障诊断方法,其特
征在于,所述雷达整机和分系统观测数据为经过预处理之后的历史工作状态数据、业务数据、机内自检数据;预处理的方法为:归一化和预编码两种方法,归一化采用最大最小值归一化方法,使参数的值都集中分布在0-1之间,对于枚举型的参数,统一采用one-hot编码方式归一化。5.基于深度学习的有源数字阵列雷达实时故障诊断系统,其特征在于,包括用户操作管理模块、数据管理模块、算法执行引擎、数据集和已训练模型库;数据集即每个有源数字阵列雷达整机或者分系统的历史工作状态数据、业务数据、机内自检数据,并对其进行数据抽取和剔野处理,将处理后的历史工作状态数据、业务数据、机内自检数据再经过归一化或者预编码,存储至相应的训练数据集或者测试数据集;用户操作管理模块,接收外部用户手动输入的训练或者测试指令;当指令为模型定义时,设置深度学习模型配置参数,发送模型参数至算法执行引擎;当指令为训练指令时,将用户指定的训练数据集发送给数据管理模块;当指令为预测指令时,将用户指定的测试数据集发送给数据管理模块;数据管理模块,根据接收到的训练数据集信息字段或者测试数据集信息字段,从数据集库中自动读取训练数据或者测试数据,将训练数据或者测试数据发送给算法执行引擎;算法执行引擎,当训练时,根据初始化的基于时间序列的深度学习模型参数,调用自定义的相关训练函数,构建有源数字阵列雷达故障深度学习模型,循环获取训练数据,并执行自定义的训练函数,直到完成训练过程,确定有源数字阵列雷达故障深度学习模型,将确定后的有源数字阵列雷达故障深度学习模型保存到已训练模型库中;当进行预测操作时,根据预测模型选择指令,从已训练模型库中挑选出相应的模型,获取预测数据集,并运用已训练模型进行预测,得到预测结果,供用户判决。6.根据权利要求8所述的基于深度学习的有源数字阵列雷达实时故障诊断系统,其特征在于:所述模型架构包括第一个lstm层、第一个dropout层、第二个lstm层、第三个lstm层、第二个dropout层和全连接层。7.根据权利要求1所述的基于深度学习的有源数字阵列雷达实时故障诊断方法,其特征在于,所述步骤s2中的深度学习模型具体训练方法为:s21、初始化基于时间序列的深度学习模型第一个dropout层和第二个dropout层的数据抛弃率,各层输入维度;所述输入维度为m
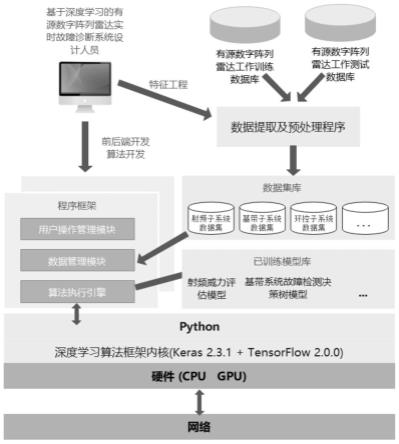
×
n,其中,m为基于时间序列的深度学习模型滑动窗口大小,n为有源数字阵列雷达整机或者分系统的观测数据的特征属性;滑动窗口大小取为有源数字阵列雷达整机和分系统特征的变化周期;s22、读取用户自定义参数包括:训练函数,验证集分割比,训练批数,神经元个数;所述神经元个数取为滑动窗口大小的整数倍;s23、采用基于时间序列的深度学习算法,循环将训练集数据输入到深度学习模型,深度学习模型按照预设的学习率对训练数据进行学习训练,得到各层的权重、偏执和深度学习模型的输出数据,将深度学习模型的输出数据与实际数据进行比较,并统计两者的最小均方误差值,直到执行完预设的循环次数;s24、当最小均方误差值超过预设的模型误差阈值时,调整模型参数,重新执行步骤s22~s23,直到最小均方误差值小于预设的模型误差阈值,从而确定基于时间序列的深度学习模型。
8.根据权利要求5所述的基于深度学习的有源数字阵列雷达实时故障诊断系统,其特征在于:所述数据集还包括验证数据集。9.根据权利要求7所述的基于深度学习的有源数字阵列雷达实时故障诊断方法,其特征在于,所述深度学习模型具体训练方法还包括如下步骤:s25、将验证集数据输入到步骤s4确定的基于时间序列的深度学习模型,将深度学习模型的输出数据与实际数据进行比较,并统计两者的均方误差值;s26、当步骤s25得到的均方误差值大于预设的模型误差阈值,则认为步骤s24确定的基于时间序列的深度学习模型欠拟合,调整模型参数,重新执行步骤s22~s26,反之,将步骤s4确定的基于时间序列的深度学习模型确定为最终的深度学习模型。10.根据权利要求5所述的基于深度学习的有源数字阵列雷达实时故障诊断方法,其特征在于确定后的有源数字阵列雷达故障深度学习模型采用h5格式进行存储。
技术总结
本发明公开了基于深度学习的有源数字阵列雷达实时故障诊断方法,涉及有源数字阵列雷达实时故障诊断技术领域,具体为基于深度学习的有源数字阵列雷达实时故障诊断方法,包括以下步骤:S1、获取有源数字阵列雷达整机和分系统历史观测数据,而历史观测数据为有源数字阵列雷达的历史工作状态数据、业务数据、机内自检数据;S2、采用有源数字阵列雷达整机和分系统历史观测数据构建训练集,对深度学习模型进行训练,得到该有源数字阵列雷达整机和分系统的故障深度学习模型。本发明可通过数据解析、剃野等方式处理有源数字阵列雷达数据,形成训练及测试数据集,实现有源数字阵列雷达历史数据库、与成熟软件算法平台。与成熟软件算法平台。与成熟软件算法平台。
技术研发人员:裴平
受保护的技术使用者:裴平
技术研发日:2022.03.30
技术公布日:2022/6/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。