1.本实用新型涉及一种储物柜,尤其涉及一种基于物联网的内嵌标准箱驱动的立体储物柜。
背景技术:
2.现有技术中,对于超市、写字楼或者小区等一般均设置有储物柜,用于快递等进行物品存储,现有的储物柜一般为单格式,即储物柜中设置有多个储物单格,每个单格具有一个柜门,用户通过输入相应的取件码后打开储物柜进行货物存取,但是,上述结构的储物柜使得储物的空间受到限制,所存储的物品少,如果增加储物柜的单格数量,那么将导致储物柜的高度增加,不方便用户使用,如果每个单格存储多个用户的物品,那么将导致用户的物品的安全得不到保障。
3.因此,为了解决上述技术问题,亟需提出一种新的技术手段。
技术实现要素:
4.有鉴于此,本实用新型的目的是提供一种基于物联网的内嵌标准箱驱动的立体储物柜,能够使得储物柜不增加高度的基础上能够存储更多的物品,而且能够方便用户存取,并确保用户物品的安全。
5.本实用新型提供的一种基于物联网的内嵌标准箱驱动的立体储物柜,包括储物柜本体以及设置于储物柜本体用于存储和取件的控制单元;
6.所述储物柜本体内设置有多层标准箱承载层,每个标准箱承载层设置一个输出口;
7.每一层标准箱承载层由多个结构相同的标准箱承载驱动单元拼接组成;
8.所述标准箱承载驱动单元包括底板、四个全向轮、四个驱动电机以及驱动控制器;
9.所述四个全向轮可转动设置于底板的上表面且标准箱搁置于四个全向轮上,所述四个驱动电机与四个全向轮一一对应且每一个驱动电机独立驱动相对应的全向轮正转或者反转,所述驱动控制器的控制输出端与四个驱动电机的控制输入端连接,所述驱动控制器与控制单元通信连接。
10.进一步,所述四个全向轮中相邻两个全向轮的轴线相互垂直且正对两个全向轮的轴线共线。
11.进一步,所述底板为正方形结构,所述全向轮的轴线与底板对角线重合。
12.进一步,相邻两个标准箱承载驱动单元上的全向轮距离的最小值小于标准箱的宽度。
13.进一步,所述标准箱承载驱动单元还包括电子标签读写器,所述电子标签读写器的输出端与控制单元连接且用于读取设置于标准箱的电子标签的信息。
14.进一步,所述控制单元包括处理器、存储器、移动通信模块以及触控显示器;
15.所述处理器的输入端与电子标签读写器的输出端通信连接,所述处理器与存储器
通信连接,所述处理器通过移动通信模块与管理平台通信连接,所述处理器与触控显示器通信连接,所述处理器的控制输出端与驱动控制器的控制输入端连接。
16.本实用新型的有益效果:通过本实用新型,能够使得储物柜不增加高度的基础上能够存储更多的物品,而且能够方便用户存取,并确保用户物品的安全。
附图说明
17.下面结合附图和实施例对本实用新型作进一步描述:
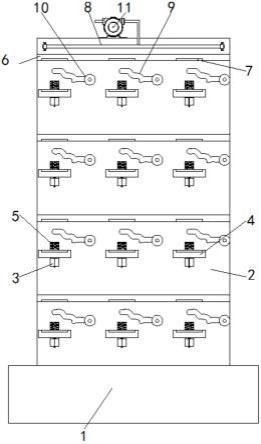
18.图1为本实用新型的储物柜结构示意图。
19.图2为本实用新型标准箱承载驱动单元结构示意图。
20.图3为图2中的俯视图。
21.图4为本实用新型的标准箱移动分析示意图。
22.图5为本实用新型的电气结构示意图。
具体实施方式
23.以下结合说明书附图对本实用新型的结构做出进一步详细说明:
24.本实用新型提供的一种基于物联网的内嵌标准箱驱动的立体储物柜,包括储物柜本体1以及设置于储物柜本体用于存储和取件的控制单元;
25.所述储物柜本体内设置有多层标准箱承载层,每个标准箱承载层设置一个输出口2;其中,被存储的物品设置于标准箱内;当然,输出口设置于仓门,当目标标准箱运动到常空的空位上时,仓门打开,当取货时,仓门关闭,需要归还标准箱时,需要通过触控显示器输入归还标准箱,此时仓门再次打开,归还完后,立即关闭,其仓门的驱动控制由现有技术实现;
26.每一层标准箱承载层由多个结构相同的标准箱承载驱动单元拼接组成;
27.所述标准箱承载驱动单元包括底板4、四个全向轮5、四个驱动电机以及驱动控制器;其中,驱动电机和驱动控制器设置在底板的下表面(图中未示出);驱动电机和全向轮之间的传动连接通过现有技术完成,在此不进行赘述;
28.所述四个全向轮可转动设置于底板的上表面且标准箱搁置于四个全向轮上,所述四个驱动电机与四个全向轮一一对应且每一个驱动电机独立驱动相对应的全向轮正转或者反转,所述驱动控制器的控制输出端与四个驱动电机的控制输入端连接,所述驱动控制器与控制单元通信连接,通过上述结构,能够使得储物柜不增加高度的基础上能够存储更多的物品,而且能够方便用户存取,并确保用户物品的安全。
29.本实施例中,所述四个全向轮5中相邻两个全向轮5的轴线相互垂直且正对两个全向轮的轴线共线,并且,所述底板为正方形结构,所述全向轮的轴线与底板对角线重合,通过上述结构,在全向轮转动时能够使得标准箱按照设定的方向运动到输出口处便于用户取用。
30.本实施例中,所述底板4为正方形结构,所述全向轮5的轴线与底板4对角线重合,通过上述结构,能够确保标准箱的运动方向的准确性,便于标准箱按照既定的方向运动。
31.本实施例中,相邻两个标准箱承载驱动单元上的全向轮距离的最小值小于标准箱的宽度,如图4所示,a和b两个标准箱承载驱动单元的全向轮距离最小值分为别为a2和b1的
距离l1、b4和a3的距离l2,其中,l1和l2是相等的,但是,标准箱的长度和宽度不大于底板的长度和宽度,通过上述结构便于标准箱在相邻两个标准箱承载驱动单元之间移动,防止标准箱从全向轮跌落。
32.本实施例中,所述标准箱承载驱动单元还包括电子标签读写器6,所述电子标签读写器的输出端与控制单元连接且用于读取设置于标准箱的电子标签的信息,电子标签设置于标准箱的外侧底部,通过上述结构,便于获取标准箱内的货物信息。
33.本实施例中,所述控制单元包括处理器、存储器、移动通信模块以及触控显示器;
34.所述处理器的输入端与电子标签读写器的输出端通信连接,所述处理器与存储器通信连接,所述处理器通过移动通信模块与管理平台通信连接,所述处理器与触控显示器通信连接,所述处理器的控制输出端与驱动控制器的控制输入端连接,其中,移动通信模块采用现有的4g或者5g通信模块,当然,移动通信模块也可以采用以太网模块、zigbee模块等进行替代,控制器采用现有的单片机。
35.当然,如果整个立体储物柜用作生鲜食品存储时,则需要在储物柜中设置恒温制冷设备,该恒温制冷设备为现有的冰箱的制冷设备相同,属于现有技术。
36.以下进一步对本实用新型的原理进行描述:
37.标准箱承载驱动单元都设置一个标准箱,并在标准箱内放置货物,但是,需要说明的是:每一层标准箱承载层中均设置有一个标准箱承载驱动单元为常空的空位,该常空的空位位于储物柜的输出口处,该空位用于标准箱在标准箱承载层中进行运转让位。
38.存货:当货物放入标准箱后,然后将标准箱放置在常空的空位上,然后通过触控显示器输入货物信息,并通过常空的空位的标准箱承载驱动单元的读写器向该标准箱上的电子标签写入该货物的对应信息,然后生成相应的取件码,由处理器发送至管理平台,管理平台向用户的手机发送取件码,最后处理器控制各个标准箱承载驱动单元动作,将标准箱运转至非常空的空位处。
39.取货:当用户通过触控显示器输入相应的取件码后,处理器向每一个电子标签读写器发送读取命令,获取标准箱的货物信息,当找到标准箱位置后,控制标准箱所在标准箱承载层的各个标准箱承载驱动单元动作,将标准箱运转至输出口处,由用户取货。
40.标准箱承载驱动单元的动作根据货物所在位置坐标进行动作,其动作原理如图4所示:
41.图4中以两个相邻的标准箱承载单驱动单元a和b为例进行说明:
42.图4中,弧形箭头表示的是各个全向轮的转动方向,以箭头所示的方式为正转,弧形箭头相反的方向为反转;
43.当标准箱从a移动到b时,那么a标准箱承载驱动单元上的全向轮a1正转,全向轮a2正转,全向轮a3和a4反转,由于摩擦的作用,全向轮会向标准箱施加力,其其受力分析如图4所示:
44.当全向轮a1正转时,会向标准箱施加力fa1,此时在图示的水平向右和竖直向上产生两个分力fa11和fa12;全向轮a2同样会向标准箱施加力fa2,此时产生的分力为水平向右分力fa21和水平向下分力fa22;
45.对于全向轮a3和全向轮a4来说,对标准箱所产生的力分别为fa3和fa4,fa3和fa4分别产生水平向右分力fa32、竖直向上分力fa31、水平向右分力fa41和竖直向下分力fa42;
由于这些力同时存在,那么fa11和fa42抵消,fa22和fa31抵消,因此,标准箱在图示的竖直方向上不运动,而fa12、fa21、fa32以及fa41这四个水平力低价,从而形成水平向右的推动力,将标准箱推向b;
46.同时,对于标准箱承载驱动单元b来说,其受理分析与a的受理分析相同,从而其产生一个水平拉力,将标准箱拉向b,当标准箱完全达到b后,则各个全向轮停止工作,当然,如果从a运动到b,那么其控制原理也类似,因此,在存储器中存储有控制表,该控制表中存储有各个标准箱承载驱动单元各个全向轮的转动方向以及标准箱移动方向,当得知标准箱移动方向,就可以直接调用该移动方向上的各个全向轮的转动方向,全向轮的转速一般都是既定的。
47.对于判断标准箱是否完全达到b,则通过现有的定位设备实现,比如:在标准箱的底部外侧壁设置永磁体,在底板上设置常开磁力开关,当常开磁力开关与永磁体正对时,常开磁力开关闭合,常开磁力开关设置在两个电阻串联组成的分压电路中,当常开磁力开关闭合后,两个电阻之间的公共连接点具有电压输出,驱动控制器检测该电压信号,从而得出标准箱完全置于b上,b上的驱动控制器向处理器发送相关信息,由处理器向其他标准箱承载驱动单元输出停止工作命令,全向轮停止转动,当然,定位设备还可以为光电开关等。
48.至于用户的目标标准箱如何运动才能够达到常空的空位上,则由标定的位置信息确定各个标准箱的运动方向,在初始时对各个标准箱承载驱动单元进行标号,每一个标号对应一个位置,标号存储于电子标签中,当用户输入取件码后,由电子标签读写器读取电子标签信息,一方面获取货物信息,一方面获取标号,从而由标号得出其位置,然后根据位置判断标准箱的运动轨迹,运动轨迹为目标标准箱需要通过那几个标准箱承载驱动单元,该轨迹确定后,就可以得知需要控制运动轨迹上的标准箱承载驱动单元的全向轮如何动作。
49.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。