1.本实用新型涉及摄影设备技术领域,尤其涉及一种可自动目标跟随拍摄车。
背景技术:
2.随着智能设备的大众化,消费用户对各类智能电子设备的使用强度与热度越来越高,其中,拍照以及视频录制是当下智能设备中热门的功能,尤其是直播行业的发展,更是扩大的人们对于拍照以及视频录制设备的需求。
3.在现有技术中,虽然已经设计出自动跟随用户移动的跟随车以及用于防止摄像机都抖动的云台设备,但现有的自动目标跟随拍摄车受限于镜头范围和ai技术的发展,摄像头往往难以对准用户所需要拍摄的场景,使得自动目标跟随拍摄车无法满足用户的需求,为此,我们提出一种可自动目标跟随拍摄车来解决上述问题。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的问题,而提出的一种可自动目标跟随拍摄车。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种可自动目标跟随拍摄车,包括跟随车和云台,还包括与云台固定连接的摄像头组件以及用于控制摄像头组件的控制机构;
7.所述摄像头组件包括与云台固定连接的球形壳体,所述球形壳体内固定连接有驱动电机,所述驱动电机的输出端固定连接有橡胶杆,所述橡胶杆远离套管的一端固定连接有球形头,所述球形壳体内滑动连接有球形摄像头,且球形摄像头的一侧开设有与球形头匹配的凹槽,所述球形壳体的内壁滑动连接有锥块,且锥块与球形壳体之间放置有压缩弹簧,所述球形壳体靠近锥块的内壁固定连接有电磁铁。
8.优选地,所述控制机构包括腕套,且腕套内设置有电池组和无线通讯模块,所述摄像头组件上设置有无线接收模块,所述腕套上嵌设有四个拉力传感器,且拉力传感器的一端固定连接有拉绳,所述拉绳远离拉力传感器的一端固定连接有拉环。
9.优选地,所述拉绳上套设有绳扣。
10.优选地,所述压缩弹簧为铜合金弹簧或镍合金弹簧。
11.优选地,所述跟随车上设置有反馈显示屏,且反馈显示屏的上端通过阻尼转轴转动连接有遮光板。
12.与现有技术相比,本实用新型的有益效果是:
13.1、本实用新型,在利用跟随车和云台自动目标跟随拍摄的过程中,用户可以利用控制机构对设置摄像头组件进行控制,进而使摄像头对准用户所需要拍摄的场景,其中利用驱动电机带动橡胶杆转动,配合锥块调整橡胶杆与电机轴心的夹紧,达到调节摄像头焦点位置的目的,可以让用户遥控摄像头完成拍摄目标的切换,尤其适合单人独自操作,满足看用户的实际需求;
14.2、本实用新型,通过设置控制机构,利用腕套配合拉力传感器和拉绳作为控制器,在将拉环套着手指上后,利用手指对摄像头组件进行操控,无需传统的遥控器,使得用户在调节摄像头组件时的操作较为隐秘,不会影响拍摄效果,尤其适用于单人进行直播的场景。
附图说明
15.图1为本实用新型提出的一种可自动目标跟随拍摄车的立体结构示意图;
16.图2为本实用新型提出的一种可自动目标跟随拍摄车的摄像头组件结构示意图;
17.图3为图2中a处的放大结构示意图;
18.图4为本实用新型提出的一种可自动目标跟随拍摄车的控制机构结构示意图;
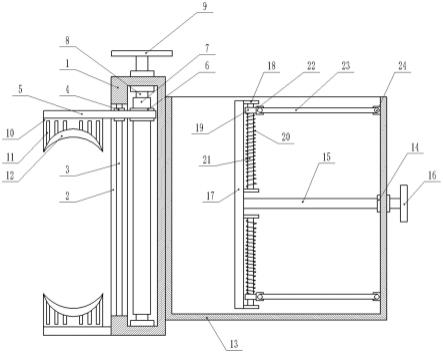
19.图5为本实用新型提出的一种可自动目标跟随拍摄车的局部结构示意图。
20.图中:1、跟随车;2、云台;3、球形壳体;4、驱动电机;5、橡胶杆;6、球形头;7、凹槽;8、锥块;9、压缩弹簧;10、电磁铁; 11、腕套;12、拉力传感器;13、拉绳;14、拉环;15、绳扣;16、反馈显示屏;17、遮光板。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
22.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
23.参照图1-3,一种可自动目标跟随拍摄车,包括跟随车1和云台 2,跟随车1和云台2均为现有设备,其具体工作原理和结构在此不过多赘述,还包括与云台2固定连接的摄像头组件以及用于控制摄像头组件的控制机构;
24.所述摄像头组件包括与云台2固定连接的球形壳体3,所述球形壳体3内固定连接有驱动电机4,驱动电机4为空心轴电机,由于锥形块、电磁铁10以及压缩弹簧9等设备与驱动电机4同轴,为了避免锥形块等部件与弹簧杆发生干涉,故采用穿过空心轴电机,所述驱动电机4的输出端固定连接有橡胶杆5,橡胶杆5远主体部分为弹性橡胶(直杆部分),且远离驱动电机4的一端为弧形,并且为硬质橡胶或者硬质塑料,橡胶杆5具有较好的弹性,并且在一定范围内可以伸长缩短,可以降低设备结构的复杂性,使整个设备成本更低,所述橡胶杆5远离套管的一端固定连接有球形头6,所述球形壳体3内滑动连接有球形摄像头,且球形摄像头的一侧开设有与球形头6匹配的凹槽7,所述球形壳体3的内壁滑动连接有锥块8,且锥块8与球形壳体3之间放置有压缩弹簧9,所述球形壳体3靠近锥块8的内壁固定连接有电磁铁10,用户在调节摄像头组件时,分别控制电磁铁10 的磁力大小和橡胶杆5的位置,进而带动球摄像头在球形壳体3内转动,当需要球形摄像头的焦点靠近驱动电机4的轴线时,控制电磁铁10的磁力变小,这时压缩弹簧9的弹力带动锥形块向球形摄像头的方向移动,与锥形块相抵的橡胶杆5在自身弹性的作用下回弹,使其与驱动电机4轴线的夹角变小,而在需要球形摄像头的焦点远离驱动电机4的轴线时则控制电磁铁10的磁力增大,另一方面,通过控
制驱动电机4转动,可以带动球形摄像头同步转动,进一步调节摄像头焦点位置,实现在一定范围内的无死角调节,满足用户的使用需求,并且结构简单稳点,设备成本,降低了用户的经济负担。
25.进一步而言,所述控制机构包括腕套11,且腕套11内设置有电池组和无线通讯模块,所述摄像头组件上设置有无线接收模块,所述腕套11上嵌设有四个拉力传感器12,四个拉力传感器12分别对应上下左右四个方向,且拉力传感器12的一端固定连接有拉绳13,所述拉绳13远离拉力传感器12的一端固定连接有拉环14,该种控制机构与传统的遥控器而言,具备更高的隐蔽性和动作幅度较小操作方式,同时腕套11也可以作为装饰品或者隐藏在用户的袖子内,而拉绳13则可以使用透明材质线绳,用户在需要对摄像头进行控制是,利用手指配合拉环14使拉绳13触发拉力传感器12,则是拉力传感器12将电信号通过无线通讯模块与跟随车1内的智能设备进行通讯,并经过跟随车1内的智能设备将信号转化为控制指令,驱动摄像头组件运行,值得一提的是,也可以设置同时拉动两个拉环14的方式设置复合指令,用于控制球形摄像头的焦距。
26.进一步而言,所述拉绳13上套设有绳扣15,绳扣15即服装上用于调节绳子长度的扣件,在本实用新型中用于调节拉绳13长度,方便不同体型的用户使用。
27.进一步而言,所述压缩弹簧9为铜合金弹簧或镍合金弹簧,由于普通的压缩弹簧9所用材质具有磁性,并且会在电磁铁10的作用下磁化,导致用户控制摄像头组件时,出现位置偏差,故采用不具备磁性的铜合金弹簧或镍合金弹簧。
28.进一步而言,所述跟随车1上设置有反馈显示屏16,且反馈显示屏16的上端通过阻尼转轴转动连接有遮光板17,设置反馈显示屏 16可以方便用户观察拍摄效果,而设置阻尼转轴连接的遮盖板主要应用于户外拍摄,避免太阳光导致用户无法看清反馈显示屏16所显示的画面。
29.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。