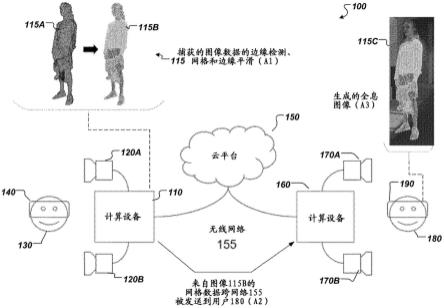
1.本发明涉及一种用于产生对象摄影图像的可重现视角的方法以及具有集成的摄像机的移动设备。
背景技术:
2.从专利文献ep 2608531 a2中已知一种组合的标准光和红外线摄像机,该摄像机根据利用标准光摄像机或另一摄像机对一个视图的第一标准光拍摄和在稍后时刻对相同视图的另一拍摄的当前图像数据输出用于寻找该视图的第一拍摄位置的指示。在此,在到达第一拍摄位置时,进行第二拍摄以产生前后对比效果。
3.从专利文献us 2015/0139535 a1中已知一种用于产生对象图像取向数据组的方法。为了产生对象图像取向数据组,首先建立对象的3d模型。为了将3d对象的相应的视图与实时图像组合,分别从预确定的方向拍摄对象的2d影像。对于对象的3d模型,产生相应于相应的2d影像的视角的截面。紧接着,将与相应的2d影像相应的3d模型截面彼此叠加,并且相应地使截面的表面取向。最终,利用2d图像叠加完成对象。在已知的方法中不利的是,相应的2d影像的视角并不总是与3d模型的截面一致,并且在使2d影像与截面的相应表面对准向时可能产生失真。
技术实现要素:
4.本发明的目的是,产生对象在限定的视角中的可重现的摄影图像。
5.该目的通过独立权利要求的主题实现。通过从属权利要求、以下描述以及附图描述本发明的有利的改进方案。
6.在上下文中,术语“摄像机”理解成集成在移动设备中的摄像机。
7.通过本发明,提供一种用于产生在对象的限定的视角中的可重现的摄影图像的方法。在此,借助于摄像机获取对象的预设的参考视图的第一2d影像/照片,并且从该第一2d影像出发借助于计算机视觉模块获得初始站立点。在此,从初始站立点开始,在对象的周围和在对象处和/或中确定一个或多个预设的和/或可调整的相对位置,作为用于拍摄至少一个第二2d影像所用的摄像机的相应视角的一个或多个可占据的站立点。借助于在地面上和/或对象处的相应的第一增强现实标记,在在摄像机的显示器上显示相应的站立点。换句话说,通过本发明提供这样的方法,即,其实现,从预确定的且相同的视角中分别以可重现的方式拍摄对象。为此,首先利用摄像机获取对象的参考视图。如果对象例如为机动车,则可将看向机动车的前车牌的视图作为参考视图。计算机视觉模块借助于图像处理方法识别参考对象的轮廓和特殊样式,并且从中确定可定位在参考对象上的初始站立点。从初始站立点中,将用于相应的2d影像的相应站立点确定成相对位置。紧接着,从在参考对象上的初始站立点出发,在自动对焦和/或对比在参考视图中的参考对象的尺寸比例的情况下例如借助于三角测量法计算摄像机相对于初始站立点的距离。紧接着,在摄像机的显示器上借
助于增强现实标记为使用者显示摄像机相对于第一视角的站立点的相对距离。借助于加速度传感器和陀螺仪传感器获得并检查,摄像机应如何取向才能在相应的站立点处实现用于拍摄对象影像的相应视角。这使得使用者能识别应占据哪个站立点才能分别在相应的视角中进行对象的相应2d拍摄。通过借助于增强现实标记显示站立点来为使用者提供辅助,从而使用者了解到,应从哪个站立点中进行对象的相应2d拍摄,以便始终从相同的视角以可重现的方式拍摄对象。在此,本发明具有的优点是,可与拍摄的人无关地保证对象图像的品质不变。此外,可由使用者和/或借助于预调整相应地调整拍摄对象的视角。
8.在此描述的增强现实标记的形状和表现形式应理解成示例性的并且也可包括其它形状和表现形式。
9.本发明也包括得到附加的优点的实施方式。
10.一种实施方式规定,在摄像机的显示器上借助于在对象视图中的第二增强现实标记为在一个或多个站立点处的使用者显示一个或多个辅助元素,以用于使摄像机以至少一个预设的和/或可调整的视角取向。换句话说,如果拿着摄像机的使用者到达如下站立点,在该站立点上从一视角对准对象并且要拍摄对象的摄影图像,则应使摄像机的相应取向和定位符合该视角。为此,借助于一个或多个辅助元素为使用者提供辅助,所述辅助元素在显示器上以第二增强现实标记的形式为使用者示出。例如,增强现实标记可表示成一个或多个圆圈,其中,圆圈中的一个具有与靶子相似的在中心的点。这为使用者给出的印象是应瞄准该视点,即,摄像机为实现相应的视角应从相应的站立点处指向该视点。
11.附加地,可借助于至少另一具有贯穿的横条的圆圈作为另一辅助元素,为了校准为相应视角设置的距离应将该横条定位到圆圈的中心。通过横条绕其中心转动,附加地可为使用者给出转动摄像机的反馈。因此,例如在实现为相应的视角设置的水平取向时,横条可例如水平地布置在圆圈的中心,以便通知使用者,达到了为相应视角设置的摄像机旋转角度。在此,可借助于摄像机内置的陀螺仪传感器和加速度传感器获得该旋转角度。由此得到的优点是,为使用者提供了在相应站立点应如何根据相应的视角使摄像机取向的辅助。
12.在此,作为第二增强现实标记的辅助元素的形式不限制在具有和/或没有中心点和横条的圆圈的形式上。
13.一种实施方式规定,在实现至少一个预设的和/或可调整的视角时,所述一个或多个辅助元素布置成彼此对齐/重合。由此得到的优点是,为了实现以上所述视角,如此使各个辅助元素布置成彼此对齐,使得使用者获得瞄准了正确视角的印象。例如借助于至少两个圆圈,其中,一个圆圈具有用于表示靶子的中心点。同样,在实现为相应视角设置的旋转时,例如与圆圈对齐的横条浮动地作为另一辅助元素。通过横条在圆圈中的一个中的漂浮,例如可向使用者表明,实现了为相应视角设置的水平取向。同样,例如通过横条绕其中心在圆圈中的一个中的转动,可附加地为使用者给出旋转摄像机的反馈。在辅助元素布置成彼此对齐时,同样为使用者给出的视觉反馈是,实现了摄像机相对于拍摄视角的正确取向。
14.接下来,描述如何进行对象、例如机动车的拍摄。
15.一种实施方式规定,摄像机借助于计算机视觉模块识别在参考视图中的对象处的参考对象,并且借助于参考对象的轮廓或样式获得相对于对象的初始站立点。换句话说,参考视图可为对象的任意视图,该视图包含参考对象,例如特殊的特征。在此,特殊的特征可为借助于计算机视觉方法可识别的轮廓或样式,例如机动车的车牌。在此,该特殊的特征用
作参考对象,将摄像机的坐标系的原点作为初始站立点设置在参考对象上,以用于确定相对于初始站立点的待占据的站立点和视角。在此,可通过人工智能实时地识别参考对象。
16.根据在坐标系中找到的参考对象的位置,测量摄像机与在对象处的参考对象的距离。在此,将用于摄像机的坐标系的原点作为初始站立点设置到参考对象上,从初始站立点开始,将所有其它的站立点计算为相对于作为初始站立点的原点的相对位置。如果对象是机动车,初始站立点例如设置在前车牌的中心。由现在已知的摄像机与初始站立点的距离可确定摄像机与针对第一视角的第一站立点的相对距离。由此得到的优点是,视角仅仅与对象相关。由于针对相应的对象,各个站立点被确定为从在对象的参考对象上的相应初始站立点出发的相对位置,在此保证了2d影像的稳定的品质。此外,对于相同类型的不同对象、例如相同机动车的不同车型,可重现该2d影像。
17.一种实施方式规定,摄像机借助于至少一个加速度传感器和/或陀螺仪传感器获得其相对于初始站立点的当前相对位置和定向。换句话说,一旦通过计算机视觉模块确定了初始站立点,现在借助于至少一个加速度传感器和/或陀螺仪传感器和三角测量法追踪摄像机为了以视角进行2d拍摄而在各个站立点之间进行的运动。由此得到的优点是,在从对象的不同侧改变站立点时,不需要重新建立参考拍摄来标定摄像机。
18.一种实施方式规定,对象是机动车。由此得到的优点是,在机动车中,可明确地确定相应的参考对象,例如车牌。此外,可以稳定的品质且可重现地拍摄机动车的不同车型。此外,在所述实施方式中,该方法也可扩展到对机动车的内部空间的2d拍摄上。
19.一种实施方式规定,参考对象是机动车的车牌。换句话说,可使用机动车的车牌作为用于确定摄像机的初始位置的参考对象。由于已经存在用于自动地识别机动车车牌的现有方法,所以得到的优点是,此时可使用现有方法,并且可以足够的精度确定初始站立点,从初始站立点出发可计算针对相对于机动车的各个视角的所有其它站立点。由此,在不同机动车中,以相同的尺寸将相应的站立点设置成相同的坐标,从而可重现地确保2d影像的品质不变。
20.一种实施方式规定,为了确定用于摄像机的相应视角的一个或多个站立点,考虑对象的尺寸。换句话说,例如区分出机动车是大型越野车还是小型车。由此,在相应的维度中得到相对偏移。因此,例如在侧视图中指向越野车后门的视角已经在小型车的视图之外,从而对于用于该视角的站立点,必须使针对小型车后门的侧视图进一步向前移动。在这种极限情况中,可将2d影像的视角与相应对象的尺寸相匹配。由此得到的优点是,该方法可针对一个或多个不同的对象以相同的品质重现出相应视角的2d影像。
21.一种实施方式规定,预设的视角的数量或集合不仅包括在对象的周围的视角而且包括在对象的内部空间中的视角。换句话说,可从对象周围的站立点拍摄对象。附加地,当可进入对象内部时,例如具有内部空间的机动车,也可从相应的为此设置的视角相似地拍摄对象的内部空间。为此,同样从初始站立点开始为使用者相应地显示在内部空间中的各个站立点。附加地,对于从在机动车的周围的站立点转移到在机动车的内部空间中的站立点,可为使用者显示如下指示,即,例如打开车门和/或前往确定的座椅,例如在后排的中间座椅。由此得到的优点是,该方法不仅仅限制在对象的外观。
22.一种实施方式规定,借助于对象的3d模型,在对象的外部区域中通过借助于蒙版/遮罩物/掩模(maske)的遮盖自动地从对象中产生抠图/显露/释放的图像和/或构图
(composing)。换句话说,通过使用车辆的3d模型,可在外部区域中通过遮盖产生蒙版并且自动地生成抠图的图像或构图,例如具有阴影或其它背景。在具有参考对象的参考视图的2d影像中,将机动车的2d影像与机动车的相应的3d模型相叠加。从参考视图出发,3d模型具有与相应视角对应的相应剪影。通过将来自一个视角的相应2d影像与相应的3d模型剪影叠加,可产生蒙版。也就是说,可将机动车从背景中剪裁出来。
23.利用抠图的图像或构图,同样可产生与视角和模拟的入射光束相应的阴影。由此得到的优点是,可相应与背景无关地为机动车摄像。通过产生例如具有阴影或其它背景等的构图,得到的优点是,可与机动车的拍摄地点无关地获得稳定的品质。此外得到的优点是,借助于叠化的方式、例如车牌的叠化,相应地能准备好可以销售的图像。
24.一种实施方式规定,由使用者选择3d模型。由此得到的优点是,3d模型与要拍摄的对象相匹配。例如,这可为机动车的确定车型。如果例如使用者为了进行销售想要拍摄特殊的机动车车型,则在菜单中预先选出相应的车型类型,从可从摄像机的存储器和/或服务器单元中调取3d模型。此外,3d模型也包含相应的机动车车型的尺寸。由此得到的优点是,该方法能以相同的品质重现的方式应用到不同对象上。
25.一种实施方式规定,借助于3d模型计算阴影并且可插入少一个2d影像中。换句话说,在2d影像中识别出对象并且将对象与相应于该对象的3d模型相叠加。此时,3d模型的在来自2d影像的视角的相应剪影中进行叠加。通过将相应的2d影像与对象的3d模型的相应剪影相叠加,可从背景中剪裁出2d影像。附加地或备选地,可借助于3d模型模拟并产生相对于虚拟光源的阴影。紧接着,可将该阴影引入2d影像中。由此得到的优点是,无论实际的光照情况如何,可重现地从期望的视角进行拍摄。
26.一种实施方式规定,可借助于叠化或抠图修改对象的第二2d影像。换句话说,可通过使用3d模型和将在2d影像中识别出的对象与相应对象3d模型的叠加,从背景中剪裁出对象。此外,对象的确定的特征可被叠化,例如机动车的车牌。由此得到的优点是,自动地将2d影像匿名化并且由此也自动地实施数据保护方面。此外由此得到的优点是,从背景中将对象抠图并且因此可与背景无关地拍摄对象。此外,由此得到的优点是,无论背景如何,都可以与拍摄地点无关地以稳定的品质拍摄2d影像。
27.一种实施方式规定,由具有集成的摄像机的移动设备实施该方法。由此得到的优点是,可由相应地配备有摄像机的智能电话实施该方法。此外,可借助于智能电话的网络连接实现数据连接。此外,由此得到的优点是,移动设备的相应的加速度传感器和陀螺仪传感器可用于确定相对于对象的站立点。
28.本发明也包括所描述的实施方式的特征的组合。
附图说明
29.接下来描述本发明的实施例。其中:
30.图1示出了机动车形式的待拍摄对象的示意图以及站立点,其中,为相应的站立点分配要拍摄的对象的2d影像的视角,
31.图2示出了对象的视图,其中示出了在摄像机的显示屏上的用于站立点标记的相应的增强现实标记,
32.图3示出了用于确定站立点和标定的对象的第一参考视图的草图,
33.图4示出了用于确定站立点和摄像机定向的增强现实标记的草图,
34.图5示出了作为用于摄像机取向的辅助元素的相应的第二增强现实标记的草图,以及
35.图6示出了被拍摄的对象的涉及中性背景和模拟阴影的、与这种图示相应的抠图(freistellung)。
具体实施方式
36.以下解释的实施例是本发明的优选的实施方式。在实施例中所描述的实施方式的各组成部分分别表示单独的、被视为彼此独立的本发明的特征,这些特征也分别彼此独立地改进本发明。因此,公开内容也应包括与所示出的实施方式的特征组合不同的组合。此外,所描述的实施方式也可通过已经描述的本发明的特征中的其它特征加以补充。
37.在图中,相同的附图标记分别表示功能相同的元件。
38.图1示出了作为机动车12的待拍摄的对象。该示例可以如下示例性的情况为基础:从具有参考对象——参考对象例如可为机动车12的前车牌13的中心——的参考视图出发,将摄像机的坐标系的原点o确定作为初始站立点。相对于原点o,确定具有各自视角1'至11'的所有站立点1至11'。在此,如此定义视角,即,使得使用者在相应的站立点1至11处利用摄像机的镜头以确定的倾斜角度指向在对象处为相应的视角1'至11'设置的点。这可借助于摄像机的加速度传感器和陀螺仪传感器获得。例如,使用者在开始时借助于在摄像机的显示器上显示的指示例如拍摄具有车牌13的机动车12的前部作为参考对象。基于借助于计算机视觉模块的自动化图像识别,识别以车牌13的形式的机动车12参考视图。现在,摄像机例如将车牌13的中心定义成其坐标系的原点o,作为用于确定站立点的初始站立点。
39.此外,借助于计算机视觉模块可识别,摄像机相对于在车牌13上的原点o具有多大距离。这可根据在2d影像中的尺寸比例获得。紧接着,确定摄像机的当前站立点与站立点1的相对位置,并且借助于在地面上显示的增强现实标记为使用者示出。图1示出了在机动车12周围的、具有相应视角的站立点1至11,这些视角作为摄像机的镜头应指向的点示出。点1'至11'以下称为视角1'至11',摄像机的镜头从相应的站立点1至11应指向这些点。在此,区分出在机动车12的外部区域中的站立点1至9,以及区分出在机动车的内部空间中的站立点10至11。
40.根据利用所述站立点确定对参考视图进行2d拍摄,促使使用者运动到站立点1并且使摄像机以第一视角1'取向。此时,第一增强现实标记例如可为具有被围绕的脚印的圆圈。这为使用者示出,使用者应如何站在相应的站立点1至11上,从而使用者已经自主地看向针对该站立点的相应视角。为了在相应的站立点1至11上使摄像机以相应的视角1'至11'取向,使用在实现该视角1'至11'时对齐地布置的辅助元素。由此,当使用者位于站立点1上时,在将摄像机以视角1'取向时使用者获得的印象是,他瞄准了点1',以实现视角1'。此时,一旦相应的辅助元素布置成对齐的,就在实现视角1'时自动地拍摄2d影像。
41.如果完成了在站立点1上以视角1'的2d拍摄,可在摄像机的显示器上借助于第一增强现实标记为使用者显示站立点2。例如,这已经以具有图形的或文字的内容的圆圈实现,在到达站立点时该内容显示两个脚印,以用于为使用者指明,针对视角2'使用者应如何站在站立点2上。站立点2的显示与使用者应如何运动到站立点2的指示相结合。一旦使用者
到达站立点2上,使用者必须使摄像机根据视角2'取向。这通过显示至少一个辅助元素实现。一旦摄像机以视角2'取向,为此辅助元素布置成对齐的并且从站立点1以视角2'进行第二2d拍摄。对于机动车12的外部区域中的站立点3至9重复该过程,其中,在机动车12的周围的地面18上分别以第一增强现实标记显示出站立点1至9。
42.一旦到达了位于机动车12的驾驶员座椅上的站立点10,例如可借助于在摄像机的显示器上的文字指示为使用者示出,首先打开机动车12的驾驶员车门,进入机动车12的内部空间中前往确定的点10。紧接着,给出前往站立点10并且与在外部空间中的视角相似地使摄像机以视角10'取向的说明。此时,分别在为此设置的座椅面和/或机动车底板上显示具有第一增强现实标记的站立点10至11。
43.在此,相应于机动车12的尺寸预设相应的初始站立点。即,例如可区分出,在站立点5处从斜后方的视角中,机动车12是大型机动车还是小型汽车。在极端情况下这可能意味着,对于使用者在使用大型越野车的尺寸的情况下拍摄小型汽车的情况,使用者可能拍摄到错过机动车的影像。因此,在确定站立点时可考虑对象的尺寸。这通过事先选择包含相应的尺寸的相应的机动车模型实现。现在,以相应的尺寸为基础,从作为摄像机的初始站立点的原点o出发计算事先确定的站立点,并且借助于在地面18上的增强现实标记在显示器上为使用者示出该站立点。
44.图2示出了站立点1至11在摄像机显示屏幕上相对于机动车12的示例性的可能图示。在此,借助于第一增强现实标记标识了站立点1至11,该增强现实标记已经包含了用于示出视线方向的脚印。随后,使用者仅仅还需使摄像机相应于正确转动和横摆角取向。这例如是在定位摄像机以实现期望的、与相应的站立点对应的视角时对使用者的第一辅助。在此,针对视角的目标点,在摄像机显示器上,为使用者显示作为辅助元素的第二增强现实标记。该方法设计成,使用者首先拍摄具有车牌13的机动车前部。此时,在该方法中重要的是,对机动车12的车牌13进行车牌识别。这例如可从机动车12的前部或后部进行。
45.一旦已经定义了第一初始站立点,就可参考设置在车牌13上的作为初始站立点的原点o,根据其余站立点2至11相对于初始站立点11的相对位置确定其余站立点。一旦定义了了在车牌13上的原点o为初始站立点,就可借助于摄像机的加速度传感器和陀螺仪传感器(例如智能电话的加速度传感器和陀螺仪传感器)确定站立点变化。由此,摄像机也可识别出,使用者到达了相应的站立点1至11。附加地,将相应的摄像机传感器和陀螺仪传感器用于,在相应的站立点处实现所规定的视角1至11',从而摄像机以相应的视角1'至11'的取向始终不变。
46.图3示例性地示出了涉及机动车12的用于确定作为初始站立点的原点o的参考视图。为了确定原点o,识别在对象12上的参考对象。在此,这例如是车牌13。通过现有的图像识别的方法可识别车牌13,并且借助于来自摄像机的自动对焦的数据和/或存储的车牌13的尺寸——与为车牌13储存的轮廓相比——确定摄像机与车牌13的距离。首先,例如以文字说明14的形式为使用者显示,使用者应前往何处进行对第一参考影像的2d拍摄。这例如是如下指示,即,使用者站在机动车12前方并且在方框15之内拍摄车牌13。
47.在此,方框15代表在对象12上的待检测的区域。借助于在方块15之内识别的车牌和在机动车12上的车牌13,通过储存的车牌13的尺寸确定距离。这例如可借助于已知的和储存的车牌13的尺寸以及在摄像机的自动对焦的情况下的三角测量法实现。从这种方法
中,获得摄像机与机动车的车牌13的第一距离。
48.紧接着,现在将所用的摄像机坐标系的原点o设置在车牌13中心。现在,相对于作为初始站立点的在车牌13中心的原点o,与图1相似地,确定具有各自视角1'至11'的站立点1至11,并且在摄像机的显示器上借助于在地面18上的第一增强现实标记为使用者示出摄像机相对于原点o的相对位置与站立点1至11'相对于原点o的相对位置的偏差。这种情况例如是因为使用者违背文字说明14停留在与机动车12车牌相距小于1米的位置或距离机动车车牌较远的位置。这很难估计出来,从而需要识别摄像机与车牌13的距离来确定摄像机相对于原点o以及相对于站立点1至11的相对位置。这实现了,能从分别相同的视角1'至11'中以始终不变的品质拍摄2d影像。在此,分别在地面18上为使用者显示第一增强现实标记以用于对站立点1至11进行站立点确定。
49.图4示出了作为用于使摄像机以相应的视角1'至11'取向的辅助元素的两个不同的第二增强现实标记的显示内容。为了在站立点2上从例如为此设置的第二视角2'进行2d拍摄,借助于第一增强现实标记为使用者示出:前往站立点2。此时,第一增强现实标记为包含脚印的圆圈,该脚印为使用者规定站立方向,从而使用者的上肢在视角2'的方向上观看。这例如可借助于具有白色压印的脚印的红色圆圈显示。此外,例如可规定,借助于以透明的圆圈的形式的第一增强现实标记显示下一个站立点3。此时,在站立点3上的透明圆圈也可包含其它元素,例如品牌标志。
50.为了在站立点2上使摄像机以相应的视角2'取向,此时可显示以具有中心点17的圆圈的形式的第二增强现实标记作为辅助元素。为了将使用者正在进行哪个视角的拍摄进行排序,例如为使用者显示文字指示16。此在,文字指示16例如可包含如下信息,例如:“12张照片中的第2张(photo 2 of 12)”。在显示器上也以文字说明14的形式为使用者显示前往下一个站立点1至11的指示。此时,文字说明14例如可包含如下指示:“走到前方驾驶员侧位置”(“gehen sie zu der vorderen fahrerseitenposition”)。一旦使用者到达站立点2,除了具有中心点17的圆圈之外,还显示另一用于使摄像机正确地以视角2'取向的圆圈。
51.图5作为辅助元素示出了具有中心点17的圆圈和用于使摄像机正确地以在站立点2上的视角2'取向的圆圈作为第二增强现实标记。例如,在摄像机上从站立点2出发与图1相似地示出显示内容,其中,摄像机的镜头以视角2'取向。在此,视角2'可为在空间中对于使用者不可见的虚拟点。此时,借助于圆圈17和19为使用者提供辅助,即,如何使摄像机取向,以瞄准视角2'。这借助于具有中心点17的一个圆圈和具有横条20的第二圆圈19实现。在此,当摄像机的镜头对准视角2'的目标点(该目标点与圆圈17的中心点重叠)时,圆圈17和19布置成彼此对齐。此时,横条20显示出为视角2'设置的距离。这例如可如此通过横条20显示,即,例如横条20从外部浮现到圆圈19中并且在实现了为视角2'设置的距离时横条布置在圆圈19的中心。此外,通过例如横条20水平地布置在圆圈19的中心,借助于横条20可显示为视角2'设置的摄像机旋转角度。
52.该布置方案也包括相应的文字指示16和文字说明14。文字说明14例如可包含如下指示:“走到前方驾驶员侧位置(go to the front driver side position)”。在文字指示16中,可显示如下信息,例如“12张照片中的第2张(photo 2of 12)”。此时,已经为使用者显示了在地面18上的下一个站立点。一旦圆圈17和19彼此对齐,就进行2d影像的2d拍摄。这或者可手动地进行或者可自动地进行。此后,例如可规定,使用者控制2d拍摄并且必要时可从
相同的视角2'进行第二2d拍摄。一旦成功进行了2d拍摄,就将用于下一个视角3'的下一个站立点3作为第一增强现实标记以透明圆圈的形式为使用者显示。相似地进行以上描述的过程,直至实现在站立点11处的视角11'。文字说明14可用于,为使用者说明站立点信息或者其它行动,例如打开机动车门或者在机动车后排的中间座椅上就座。文字指示16可用于,示出关于2d影像的当前数量相对于2d影像的目标值的信息。
53.图6示出了从背景22中抠图的机动车12视图,以用于与背景无关地建立2d影像。在此,从存储器中提取相应的3d模型,存储器或者可为摄像机的存储器或者服务器单元的存储器。现在,将相应的视角影像1'至11'与机动车12的3d模型的相应剪影叠加,从而可从背景22中将机动车12抠图。附加地,可相应于虚拟光源模拟阴影21。此时,背景或者可设计成中性地作为白色背景或者可为任意其它背景22。
54.通过该方法,为用户提供了用于在经销商或最终顾客处拍摄机动车的摄影图像的标准流程。此时,可以稳定的品质任意地拍摄相应的机动车的照片。
55.总地来说,目前的现有技术是,在经销商或者最终顾客处没有为机动车拍摄照片的标准流程。使用者随意拍摄影像并且对其进行再处理/编辑。在此,本方法的基本想法是,通过标记将使用者引导到预设的位置。在目前的现有技术中的缺点是,图像达不到客户想要的品质。此外,图像品质变化大并且可能需要第三方进行再处理。不能有针对性地使用有利的视角。通过在移动应用形式的app中的这种方法确保了,也能以车辆特定的方式以保持不变的品质且可重复地获得具有规定视角的影像。此外,给出了叠化(例如用于车牌)或者抠图(例如除去背景)的可能性。在该方法中有利的是,与摄像师无关地实现相同品质的影像。这通过利用标记将使用者引导到预设的位置处实现。该方法的效果是,由此可重现影像。此外,影像也可针对对象个性化地设计,这是因为可针对销售对象分别特殊地对站立点进行编程。
56.接下来描述方法的尤其优选的实施方式。
57.在技术上,借助于移动设备的摄像机实施该方法。在借助于移动设备的摄像机获取车辆之后,借助于增强现实以3d元素丰富实时场景。现在,可在车辆周围看到用于期望的视角的站立点和辅助元素。如果使所有元素对齐,自动地拍摄照片。由此,实现了对待拍摄的图像的控制。此外,这可任意多次地在不同的车辆处重复。通过使用车辆的3d模型,可在外部区域中通过遮盖产生蒙版,并且自动地产生被抠图的图像或构图,例如具有阴影或其它背景等。
58.在此,该方法规定8个步骤。在第一步骤中,从前部或后部识别机动车的车牌以用于位置确定。随后,定位与被拍摄的机动车相似的机动车的3d对象。将已拍摄的机动车与机动车的相应的3d模型叠加,以用于图像再处理。在第三步骤中,根据在第一步骤中的车牌识别,在地面上显示ar标记以指示预设的位置。在第四步骤中,为使用者显示用于使摄像机取向的附加标记。在第五步骤中,在实现预设的视角时自动激活摄像机。例如,这在作为附加标记的、用于使摄像机取向的辅助元素布置成彼此对齐的情况下实现。在第六步骤中,在成功触发照片拍摄之后,为使用者显示用于下一站立点的标记。在第七步骤中,将相应的2d影像与3d对象——类似于2d影像在与3d对象相应的剪影中的视角——相叠加,并且从2d影像的背景中剪裁出3d对象。在第八步骤中,事后地借助于3d对象和虚拟光源插入阴影。
59.这具有的优点是,还可分别由使用者配置照片。附加地,可自动地在对象上叠化特
殊标记,例如车牌。此外,通过该方法也实现了,拍摄机动车的内饰图。
60.一种优选的实施方式涉及用于产生对象12的摄影图像的可重现的视角1'至11'的方法。在此,借助于摄像机获取对象12的预设的参考视图的第一2d影像,并且从第一2d影像中,借助于计算机视觉模型确定使用者相对于对象的初始站立点1。在此,从作为摄像机的坐标系的原点o的初始站立点开始,在对象12的周围和/或在对象12中确定一个或多个预设的和/或可调整的相对位置,作为用于拍摄至少一个第二2d影像所用的摄像机的相应视角1'至11'的一个或多个站立点1至11。借助于在地面上和/或在对象上的第一增强现实标记在摄像机的显示器上的对象视图中显示相应的站立点1至11。在此,借助于作为辅助元素的第二增强现实标记实现摄像机在角度和旋转方面根据与相应的站立点1至11对应的视角1'至11'取向。
61.总地来说示例表明,如何通过本发明利用标记将使用者引导到预设的位置处,以用于以不变的品质拍摄对象的摄影图像。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。