1.本发明涉及虚拟现实技术领域,尤其涉及一种虚拟现实同步系统及方法。
背景技术:
2.随着vr技术在物联网设备交互、动作采集等领域得到深入的发展应用,现有vr交互方案在交互过程中所存在的同步问题随之凸显。由于简易交互设备所采用的三轴陀螺仪存在累积漂移现象,因而随着用户无规律挥动交互设备,交互设备所判定的用户姿态会与用户实际的姿态产生同步误差,在采用vr技术与家电等实物进行物联网交互时,同步误差的存在可能造成无效操作或者误操作。而在进行动作采集时,同步误差也会造成采集失真,影响模型的精确性与拟真程度。
技术实现要素:
3.本发明的目的是解决现有技术的不足,提供一种虚拟现实同步系统及方法。
4.本发明实施例的第一方面公开了一种虚拟现实同步系统,该系统包括:
5.与处理模块通信连接的空间定位模块、姿态捕捉模块及显示模块;
6.所述空间定位模块包括布设于活动区域顶部的光学摄像头,以及环绕活动区域布设的若干红外发射器;
7.所述显示模块采用vr头盔;
8.所述姿态捕捉模块采用九轴陀螺仪,所述九轴陀螺仪布设于所述vr头盔内部;
9.所述处理模块获取所述空间定位模块所拍摄的空间数据与所述姿态捕捉模块所捕捉的人体的姿态数据;
10.所述处理模块对所述空间数据及所述姿态数据进行同步处理,构造虚拟场景。
11.优选的,所述红外发射器用以测定人体在活动区域中的相对位置,获得相对位置数据;
12.优选的,所述光学摄像头用以拍摄活动区域中人体的轮廓影像。
13.优选的,所述九轴陀螺仪至少具备三轴加速度计、三轴陀螺仪及三轴磁力计,所述三轴加速度计用以测定人体的加速度值,所述三轴陀螺仪用以测定人体运动的角速率。
14.优选的,所述三轴磁力计用以标定、校正检测方向。
15.优选的,所述vr头盔用以获取所述虚拟场景并进行输出。
16.本发明实施例的第二方面公开了一种虚拟现实同步方法,该方法包括:
17.获取光学摄像头拍摄人体的轮廓影像,以及,获取红外发射器测得人体在活动区域的相对位置数据;
18.基于所述轮廓影像及所述相对位置数据,确定人体在活动区域的实时位置;
19.获取九轴陀螺仪中三轴加速度计与三轴陀螺仪所测定的加速度值与角速率,确定人体在活动区域的实时姿态;
20.基于实时位置与实时姿态构造虚拟场景。
21.优选的,设定自检周期,在到达自检周期时通过三轴磁力计校正九轴陀螺仪的检测方向。
22.本发明与现有技术相比具有以下优点:
23.相比传统仅采用三轴陀螺仪的动捕方案,通过采用光学摄像头配合红外发射器进行外部定位,以及采用九轴陀螺仪进行姿态定位,可准确测得人体的实时位姿,进而再根据实时位姿构造同步的虚拟场景,有效避免了交互过程中现实与虚拟环境所存在的同步问题,提高交互的精准度。
附图说明
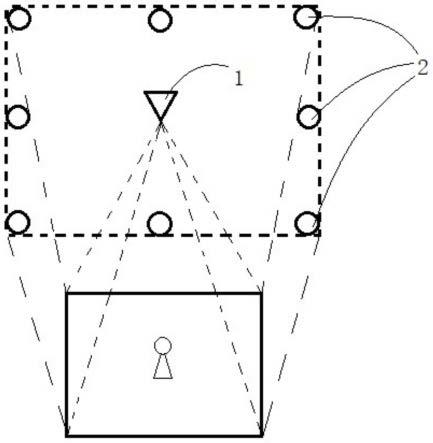
24.图1是本发明的一种虚拟现实同步系统中空间定位模块的结构示意图;
25.图2是本发明的一种虚拟现实同步方法的工作流程示意图。
26.主要结构符号说明:
27.光学摄像头1红外发射器2
具体实施方式
28.为加深本发明的理解,下面将结合实施案例和附图对本发明作进一步详述。本发明可通过如下方式实施:
29.实施例一
30.请参照图1,一种虚拟现实同步系统,包括:
31.与处理模块通信连接的空间定位模块、姿态捕捉模块及显示模块;
32.空间定位模块包括布设于活动区域顶部的光学摄像头,以及环绕活动区域布设的若干红外发射器;
33.显示模块采用vr头盔;
34.姿态捕捉模块采用九轴陀螺仪,九轴陀螺仪布设于vr头盔内部;
35.处理模块获取空间定位模块所拍摄的空间数据与姿态捕捉模块所捕捉的人体的姿态数据;
36.处理模块对空间数据及姿态数据进行同步处理,构造虚拟场景。
37.本实施例中,红外发射器用以测定人体在活动区域中的相对位置,获得相对位置数据。具体地,通过将多个红外发射器环绕活动区域布设,可从多角度对人体进行距离测定,避免出现监测死角。通过对同一时刻多角度测得的距离进行综合分析,可获知人体在活动区域中的相对位置。
38.本实施例中,光学摄像头用以拍摄活动区域中人体的轮廓影像。
39.作为一种可选的实施方式,光学摄像头及红外发射器可布设于活动区域上方,以避免影响人体活动。
40.本实施例中,九轴陀螺仪至少具备三轴加速度计、三轴陀螺仪及三轴磁力计,三轴加速度计用以测定人体的加速度值,三轴陀螺仪用以测定人体运动的角速率。
41.三轴磁力计用以标定、校正检测方向。
42.从而,在对人体的加速度值与角速率进行综合分析后,可准确获知人体的实际运动情况,还通过三轴磁力计标定磁场方向,相比于传统仅有的三轴陀螺仪,有效确保了姿态
捕捉过程时刻精准。
43.本实施例中,vr头盔用以获取虚拟场景并进行输出。
44.综上,相比传统仅采用三轴陀螺仪的动捕方案,通过采用光学摄像头配合红外发射器进行外部定位,以及采用九轴陀螺仪进行姿态定位,可准确测得人体的实时位姿,进而再根据实时位姿构造同步的虚拟场景,有效避免了交互过程中现实与虚拟环境所存在的同步问题,提高交互的精准度。
45.实施例二
46.请参照图2,一种虚拟现实同步方法,包括以下步骤:
47.获取光学摄像头拍摄人体的轮廓影像,以及,获取红外发射器测得人体在活动区域的相对位置数据;
48.基于轮廓影像及相对位置数据,确定人体在活动区域的实时位置;
49.获取九轴陀螺仪中三轴加速度计与三轴陀螺仪所测定的加速度值与角速率,确定人体在活动区域的实时姿态;
50.基于实时位置与实时姿态构造虚拟场景。
51.可见,通过光学摄像头、红外发射器及九轴陀螺仪配合,可构造得到同步的虚拟场景,有效避免了交互过程中现实与虚拟环境所存在的同步问题,提高交互的精准度。
52.本实施例中,设定自检周期,在到达自检周期时通过三轴磁力计校正九轴陀螺仪的检测方向,相比于传统仅有三轴陀螺仪的交互设备,有效确保了姿态捕捉过程时刻精准。
技术特征:
1.一种虚拟现实同步系统,其特征在于,包括:与处理模块通信连接的空间定位模块、姿态捕捉模块及显示模块;所述空间定位模块包括布设于活动区域顶部的光学摄像头,以及环绕活动区域布设的若干红外发射器;所述显示模块采用vr头盔;所述姿态捕捉模块采用九轴陀螺仪,所述九轴陀螺仪布设于所述vr头盔内部;所述处理模块获取所述空间定位模块所拍摄的空间数据与所述姿态捕捉模块所捕捉的人体的姿态数据;所述处理模块对所述空间数据及所述姿态数据进行同步处理,构造虚拟场景。2.根据权利要求1所述的一种虚拟现实同步系统,其特征在于,所述红外发射器用以测定人体在活动区域中的相对位置,获得相对位置数据。3.根据权利要求1所述的一种虚拟现实同步系统,其特征在于,所述光学摄像头用以拍摄活动区域中人体的轮廓影像。4.根据权利要求1所述的一种虚拟现实同步系统,其特征在于,所述九轴陀螺仪至少具备三轴加速度计、三轴陀螺仪及三轴磁力计,所述三轴加速度计用以测定人体的加速度值,所述三轴陀螺仪用以测定人体运动的角速率。5.根据权利要求4所述的一种虚拟现实同步系统,其特征在于,所述三轴磁力计用以标定、校正检测方向。6.根据权利要求1所述的一种虚拟现实同步系统,其特征在于,所述vr头盔用以获取所述虚拟场景并进行输出。7.一种虚拟现实同步方法,其特征在于,包括:获取光学摄像头拍摄人体的轮廓影像,以及,获取红外发射器测得人体在活动区域的相对位置数据;基于所述轮廓影像及所述相对位置数据,确定人体在活动区域的实时位置;获取九轴陀螺仪中三轴加速度计与三轴陀螺仪所测定的加速度值与角速率,确定人体在活动区域的实时姿态;基于实时位置与实时姿态构造虚拟场景。8.根据权利要求7所述的一种虚拟现实同步方法,其特征在于,所述方法还包括:设定自检周期,在到达自检周期时通过三轴磁力计校正九轴陀螺仪的检测方向。
技术总结
本发明涉及一种虚拟现实同步系统及方法,该系统包括与处理模块通信连接的空间定位模块、姿态捕捉模块及显示模块;空间定位模块包括布设于活动区域顶部的光学摄像头,以及环绕活动区域布设的若干红外发射器;显示模块采用VR头盔;姿态捕捉模块采用九轴陀螺仪,九轴陀螺仪布设于所述VR头盔内部。本发明相比传统仅采用三轴陀螺仪的动捕方案,通过采用光学摄像头配合红外发射器进行外部定位,以及采用九轴陀螺仪进行姿态定位,可准确测得人体的实时位姿,进而再根据实时位姿构造同步的虚拟场景,有效避免了交互过程中现实与虚拟环境所存在的同步问题,提高交互的精准度。提高交互的精准度。提高交互的精准度。
技术研发人员:曾锦鸿 贺轩 朱万军
受保护的技术使用者:广州视宴信息科技有限公司
技术研发日:2022.02.23
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。