1.本发明涉及计算机、航空、无人机、人工智能和自动控制的技术领域,尤其涉及到无人机巡查视频中目标的地理坐标的建模与计算的方法。
背景技术:
2.无人机具有高机动性,并且操作灵活,可以非常有效的在多种环境中实施巡查以获取各种信息,常用于侦查监视、目标定位、气象探测、勘探测绘、航空摄影等项目中。
3.如果能将无人机应用于目标定位,则可以实时获取目标点的实际地理坐标信息,对地面以及海移动目标也可以实时定位,定位效率高,且可操作性强。例如公路巡视时对道路违章车辆进行定位、批量获取车辆的gps信息数据等;对江面上的船舶进行定位,将船位信息与数据库进行比对,判断其是否开启船载自动识别系统(ais);在无人机巡检的实时视频画面中,叠加由真实航道gps位置计算得到的虚拟航道,掌握航线安全等。
技术实现要素:
4.为了解决上述技术问题,本申请提供了无人机巡查视频中目标的地理坐标的建模与计算的方法,把视频图像中目标的像素位置与真实场景中物体的gps一一对应起来,并根据无人机的姿态信息和相机的内参计算出图像坐标系和大地坐标系之间的转换关系,最后换算得出目标的地理坐标信息。
5.无人机巡查视频中目标的地理坐标的建模与计算的方法,其特征在于,应用于目标定位,所述方法,包括步骤:相机标定、计算目标与无人机之间的距离、计算目标相对于无人机的方位角和计算目标的地理坐标。
6.进一步地,所述相机标定,首先对无人机的内置相机进行标定,获取相机的主点和焦距,并根据相机的传感器参数信息计算像元尺寸。
7.进一步地,所述计算目标与无人机之间的距离,首先根据相机的主点和像元尺寸信息计算图像上的目标点到主点的物理距离,再根据无人机拍摄影像时的飞行高度和俯仰角,基于相机成像原理推算出图像中的目标点在地面上的位置,进而计算出该目标与无人机之间的距离。
8.进一步地,所述计算目标相对于无人机的方位角,利用投影变换,获取无人机在地面上的投影点与目标之间的相对位置关系,并根据无人机拍摄影像时的偏航角计算目标相对于无人机的方位角。
9.进一步地,所述计算目标的地理坐标,根据无人机的地理坐标信息、目标相对于无人机的方位角以及目标到无人机的距离和计算得到目标点的地理坐标信息。
10.本发明的技术效果在于:在本发明中,提供了无人机巡查视频中目标的地理坐标的建模与计算的方法,其特征在于,应用于目标定位,包括步骤:相机标定、计算目标与无人机之间的距离、计算目标相对于无人机的方位角和计算目标的地理坐标。通过本发明,能够实时获取目标点的实际
地理坐标信息,对地面以及海移动目标能够实时高效率地定位和保障航线安全。
附图说明
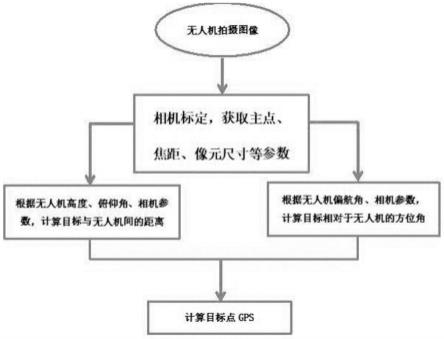
11.图1是无人机巡查视频中目标的地理坐标的建模与计算的方法示意图。
具体实施方式
12.下面是根据附图和实例对本发明的进一步详细说明:图1是无人机巡查视频中目标的地理坐标的建模与计算的方法示意图。如图1所示,无人机巡查视频中目标的地理坐标的建模与计算,主要是把视频图像中目标的像素位置与真实场景中物体的gps一一对应起来,主要方法是根据无人机的姿态信息和相机的内参计算出图像坐标系和大地坐标系之间的转换关系,换算得出目标的地理坐标信息。
13.本发明无人机巡查视频中目标的地理坐标的建模与计算的方法,能够应用于目标定位,包括如下步骤:1、相机标定:首先对无人机的内置相机进行标定,获取相机的主点和焦距,并根据相机的传感器参数信息计算像元尺寸。
14.2、计算目标与无人机之间的距离:首先根据相机的主点和像元尺寸信息计算图像上的目标点到主点的物理距离;再根据无人机拍摄影像时的飞行高度和俯仰角,基于相机成像原理推算出图像中的目标点在地面上的位置,进而计算出该目标与无人机之间的距离。
15.3、计算目标相对于无人机的方位角:利用投影变换,获取无人机在地面上的投影点与目标之间的相对位置关系,并根据无人机拍摄影像时的偏航角计算目标相对于无人机的方位角。
16.4、计算目标的地理坐标:根据无人机的地理坐标信息、目标相对于无人机的方位角以及目标到无人机的距离,计算得到目标点的地理坐标信息。
17.以上所述仅为本发明的较佳实施例,并非用来限定本发明的实施范围;凡是依本发明所作的等效变化与修改,都被视为本发明的专利范围所涵盖。
技术特征:
1.无人机巡查视频中目标的地理坐标的建模与计算的方法,其特征在于,应用于目标定位,所述方法,包括步骤:相机标定、计算目标与无人机之间的距离、计算目标相对于无人机的方位角和计算目标的地理坐标。2.如权利要求1所述的无人机巡查视频中目标的地理坐标的建模与计算的方法,所述相机标定,首先对无人机的内置相机进行标定,获取相机的主点和焦距,并根据相机的传感器参数信息计算像元尺寸。3.如权利要求1所述的无人机巡查视频中目标的地理坐标的建模与计算的方法,所述计算目标与无人机之间的距离,首先根据相机的主点和像元尺寸信息计算图像上的目标点到主点的物理距离,再根据无人机拍摄影像时的飞行高度和俯仰角,基于相机成像原理推算出图像中的目标点在地面上的位置,进而计算出该目标与无人机之间的距离。4.如权利要求1所述的无人机巡查视频中目标的地理坐标的建模与计算的方法,所述计算目标相对于无人机的方位角,利用投影变换,获取无人机在地面上的投影点与目标之间的相对位置关系,并根据无人机拍摄影像时的偏航角计算目标相对于无人机的方位角。5.如权利要求1所述的无人机巡查视频中目标的地理坐标的建模与计算方法,所述计算目标的地理坐标:根据无人机的地理坐标信息、目标相对于无人机的方位角以及目标到无人机的距离和计算得到目标点的地理坐标信息。
技术总结
本申请公开了无人机巡查视频中目标的地理坐标的建模与计算的方法,其特征在于,应用于目标定位,包括步骤:相机标定、计算目标与无人机之间的距离、计算目标相对于无人机的方位角和计算目标的地理坐标。通过本发明,能够实时获取目标点的实际地理坐标信息,对地面以及海移动目标能够实时高效率地定位和保障航线安全。安全。安全。
技术研发人员:陈尧
受保护的技术使用者:南京迈界遥感技术有限公司
技术研发日:2020.12.08
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
