技术特征:
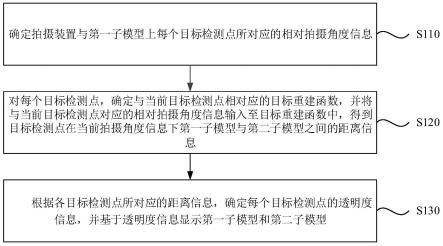
1.一种确定透明度的方法,其特征在于,包括:确定拍摄装置与第一子模型上每个目标检测点所对应的相对拍摄角度信息;对每个目标检测点,确定与当前目标检测点相对应的目标重建函数,并将与所述当前目标检测点对应的相对拍摄角度信息输入至所述目标重建函数中,得到所述目标检测点在所述当前拍摄角度信息下第一子模型与第二子模型之间的距离信息;所述第一子模型为包裹所述第二子模型局部的子模型;重建函数是基于目标检测点在球谐函数中各基函数上的投影系数值构建出来的;根据各目标检测点所对应的距离信息,确定每个目标检测点的透明度信息,并基于所述透明度信息显示第一子模型和所述第二子模型。2.根据权利要求1所述的方法,其特征在于,还包括:确定各个目标检测点所对应的目标重建函数;所述确定各个目标检测点所对应的目标重建函数,包括:根据预先接收到的每个目标检测点在球谐函数中各基函数的投影系数值,确定与每个目标检测点所对应的目标重建函数;目标重建函数用于对输入的当前拍摄角度进行处理,得到与当前拍摄角度所对应的目标检测点所属第一子模型与第二子模型之间的距离信息。3.根据权利要求1所述的方法,其特征在于,在根据预先接收到的每个目标检测点在球谐函数中各基函数的系数值,确定与每个目标检测点所对应的目标重建函数之前,还包括:确定每个目标检测点在所述球谐函数中各基函数上的投影系数值;所述确定每个目标检测点在所述球谐函数中各基函数上的投影系数值,包括:对第一子模型上的各目标检测点,确定当前目标检测点向各方向发射物理射线透过第二子模型时的待处理碰撞点信息,根据所述当前目标检测点与各待处理碰撞点信息,确定当前目标碰撞在各方向上距离值;根据每个目标检测点在各方向上的距离值,确定与每个目标检测点相对应的距离函数;基于所述球谐函数对各目标检测点的距离函数进行处理,得到各目标检测点在球谐函数中各基函数上投影系数值;所述球谐函数中包括多个基函数。4.根据权利要求3所述的方法,其特征在于,所述确定当前目标检测点向各方向发射物理射线透过第二子模型时的待处理碰撞点信息,根据所述当前目标检测点与各待处理碰撞点信息,确定当前目标碰撞在各方向上距离值,包括:以当前目标检测点为球心,向空间中的任意方向发射物理射线,记录各物理射线与所述第二子模型相交时的待处理碰撞点,并确定各待处理碰撞点与目标检测点之间的距离值;若物理射线与所述第二子模型不存在待处理碰撞点时,将与所述物理射线所对应的距离值标记为设定值;基于与各物理射线所对应的距离值和设定值,确定所述当前目标检测点在各方向上的距离值。5.根据权利要求3所述的方法,其特征在于,所述基于所述球谐函数对各目标检测点的距离函数进行处理,得到各目标检测点在球谐函数中各基函数上投影系数值,包括:确定所述球谐函数的阶数,并根据所述阶数确定基函数的表示方式以及基函数的数
量;针对每个目标检测点,基于各基函数对当前目标检测点的距离函数进行处理,得到所述当前目标检测点在基函数方向上投影系数值;所述投影系数值的数量与所述基函数的数量相同。6.根据权利要求3所述的方法,其特征在于,还包括:将每个目标检测点的投影系数值按照空间位置关系对应存储至至少一副图像中,并将所述至少一副图像存储至目标位置,以从所述目标位置获取所有目标检测点在对应阶球谐函数上的投影系数值。7.根据权利要求6所述的方法,其特征在于,所述确定与当前目标检测点相对应的目标重建函数,包括:针对各目标检测点,从所述目标位置调取所述至少一副图像,并确定所述当前目标检测点在所述至少一副图像中的目标像素点位置;分别从所述至少一副图像中的目标像素点位置处,调取存储的各投影系数值;基于球谐函数对与所述当前目标检测点所对应的各投影系数值进行重建处理,得到所述当前目标检测点所对应的目标重建函数。8.根据权利要求1所述的方法,其特征在于,所述将与所述当前目标检测点对应的相对拍摄角度信息输入至所述目标重建函数中,得到所述目标检测点在所述当前拍摄角度信息下第一子模型与第二子模型之间的距离信息,包括:确定当前目标检测点与所述拍摄装置所对应的相对拍摄角度信息;将所述相对拍摄角度信息输入至所述目标重建函数中,确定所述当前碰撞点在所述相对拍摄角度下所对应的距离信息,所述距离信息为所述目标检测点和所述拍摄装置所属直线与第二子模型碰撞时,目标检测点与所述第二子模型碰撞点之间的距离信息。9.根据权利要求1所述的方法,其特征在于,所述根据各目标检测点所对应的距离信息,确定每个目标检测点的透明度信息,包括:根据与各目标检测点所对应的距离信息,按照预先建立的距离信息和透明度信息之间的对应关系,确定与每个目标检测点相对应的透明度信息。10.根据权利要求1所述的方法,其特征在于,所述根据各目标检测点所对应的距离信息,确定每个目标检测点的透明度信息,并基于所述透明度信息显示第一子模型和所述第二子模型,包括:针对每个目标检测点,根据当前目标检测点所对应的距离信息、第一子模型以及第二子模型的属性信息,确定与所述当前目标检测点的透明度信息;所述属性信息包括材质和/或颜色;基于与每个目标检测点所对应的透明度信息,调整所述第一子模型和所述第二子模型的显示信息。11.一种确定透明度的装置,其特征在于,包括:相对拍摄角度信息确定模块,用于确定拍摄装置与第一子模型上每个目标检测点所对应的相对拍摄角度信息;距离信息确定模块,用于对每个目标检测点,确定与当前目标检测点相对应的目标重建函数,并将与所述当前目标检测点对应的相对拍摄角度信息输入至所述目标重建函数
中,得到所述目标检测点在所述当前拍摄角度信息下第一子模型与第二子模型之间的距离信息;所述第一子模型为包裹所述第二子模型局部的子模型;重建函数是基于目标检测点在球谐函数中各基函数上的投影系数值构建出来的;透明显示模块,用于根据各目标检测点所对应的距离信息,确定每个目标检测点的透明度信息,并基于所述透明度信息显示第一子模型和所述第二子模型。12.一种电子设备,所述电子设备包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如权利要求1-10中任一所述的确定透明度的方法。13.一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行如本权利要求1-10中任一所述的确定透明度的方法。
技术总结
本发明实施例提供一种确定透明度的方法、装置、电子设备及存储介质,该方法包括:确定拍摄装置与第一子模型上每个目标检测点所对应的相对拍摄角度信息;对每个目标检测点,确定与当前目标检测点相对应的目标重建函数,并将与当前目标检测点对应的相对拍摄角度信息输入至目标重建函数中,得到目标检测点在当前拍摄角度信息下第一子模型与第二子模型之间的距离信息;重建函数是基于目标检测点在球谐函数中各基函数上的投影系数值构建出来的;根据各目标检测点所对应的距离信息,确定每个目标检测点的透明度信息,并基于透明度信息显示第一子模型和第二子模型。本实施例的技术方案实现了透明显示效果与实际相符,从而提高用户体验的技术效果。验的技术效果。验的技术效果。
技术研发人员:冯乐乐
受保护的技术使用者:上海米哈游天命科技有限公司
技术研发日:2020.12.08
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。