1.本发明涉及饲料厂标注技术领域,具体为一种基于遥感图像识别的饲料厂标注系统。
背景技术:
2.为了实现对客户信息的精准把握,实现价值共生,使用最前沿的ai图像识别技术,网络爬虫技术,gis地理信息系统技术,为客户提供更好的服务,通过对遥感卫星影像的分析,我们可以实现在地图上对已存在的饲料厂进行坐标定位,然后通过网络爬虫等工具,我们可以进一步完善饲料厂的其他信息,最终把结果呈现在我们的客户系统之中,因此需要一种基于遥感图像识别的饲料厂标注系统。
技术实现要素:
3.本发明的目的在于提供一种基于遥感图像识别的饲料厂标注系统,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:
5.一种基于遥感图像识别的饲料厂标注系统,包括以下遥感图像识别饲料厂的步骤:
6.s1,使用基于图像拼接的深度学习模型训练和识别方法:由于遥感图像瓦片的数量庞大,单张瓦片识别的话效率较低,所以设计了一种基于图像拼接技术的深度学习模型训练和识别方法;
7.s2,根据饲料厂的特征,在给训练样本打标签的时候,重点对筒仓和生产车间进行标注;
8.s3,使用油桶标签数据的迁移学习方法,来解决样本量不足的问题;
9.s4,根据瓦片id推算地理经纬度的方法;
10.s5,使用闭环增强学习去不断提升神经网络的识别精度;
11.s6,设计了一种饲料厂仓储能力的估算方法;
12.s7,设计了一套饲料厂信息匹配的方法。
13.作为本发明优选的方案,所述使用基于图像拼接的深度学习模型训练和识别方法:把每4张256*256像素大小的瓦片拼接在一起,生成一张512*512大小的图片,然后用拼接后的图片进行模型的训练和识别(具体方法参照s3),这样可以加快模型训练和识别的速度。经过测试,在不改变识别精度的情况下,速度是原有模型的三倍左右。
14.作为本发明优选的方案,所述根据饲料厂的特征,在给训练样本打标签的时候,重点对筒仓和生产车间进行标注:
15.通过对饲料厂卫星影像的观察,发现大部分饲料厂都具有圆筒仓这一特征,所以重点对圆筒仓打标签让模型学习,但是也存在着没有圆筒仓的饲料厂(只有平仓),为了防止漏检这类饲料厂,对生产车间这一特征也打标签进行学习。
16.作为本发明优选的方案,所述使用油桶标签数据的迁移学习方法,来解决样本量不足的问题:
17.在模型训练的时候,使用已公开的yolo_v3神经网络框架对已公开的油桶数据集进行学习,然后保存下darknet网络部分的权重参数,并冻结这些参数,再用打完标签的饲料厂数据集,去重新训练神经网络,最终得到整个模型的权重参数。
18.作为本发明优选的方案,所述根据瓦片id推算地理经纬度的方法:
19.已知瓦片编号xtile,ytile和瓦片层级zoom这三个参数,可以根据这三个参数计算该瓦片对应的地理经纬度;
20.经度的具体算法如下:
[0021][0022]
纬度的具体算法如下:
[0023][0024]
作为本发明优选的方案,所述使用闭环增强学习去不断提升神经网络的识别精度:
[0025]
在模型实际运行的过程中,以行政区域“市”为单位对该片区所有19层级的地图瓦片进行图像识别,最后以行政区域“省”为单位对所有识别结果进行汇总,然后人工剔除掉误判为饲料厂的瓦片,对判断正确的瓦片做更精细的标签,并作成新的数据集,最后在原有的模型基础上进一步训练神经网络,这样不断迭代,可以不断去提升识别的准确率。
[0026]
作为本发明优选的方案,所述一种饲料厂仓储能力的估算方法:
[0027]
根据神经网络bounding-box返回的筒仓坐标值进行筒仓容积大小的估算,令bounding-box返回值为[x1x2y1y2],
[0028]
那么筒仓横截面外接矩形的长为:l=(x
2-x1)
×
512
×
0.2986米;
[0029]
那么筒仓横截面外接矩形的宽为:w=(y
2-y1)
×
512
×
0.2986米;
[0030]
其中,512为单张图片的像素点个数,0.2986为19层级下每个像素点对应的物理大小;
[0031]
由于拍摄的角度和计算误差,这两者很多时候并不是相等的,所以两者取平均作为圆筒仓的直径,那么圆筒仓半径为:
[0032][0033]
由于筒仓的设计高度一般跟r成正比,已知圆筒仓的横截面面积:area=πr2,那么根据体积公式v=πr2h,可以得知v
∝
r3。根据已掌握的饲料厂筒仓容积和该容积下的半径数据,使用最小二乘法,确定方程v=kr3 b,那么之后就可以套用该公式,用图像识别出的半径来估算容积。最后,对该饲料厂所有筒仓容积进行求和,并用该数值来表征饲料厂的仓储能力,进而可以大致判断其产能大小。
[0034]
作为本发明优选的方案,所述一套饲料厂信息匹配的方法:
[0035]
首先使用网络爬虫技术,按照已掌握的饲料厂的名单,爬取已公开的饲料厂的各项信息,包括地址、电话、法人等信息,然后调用地图api,根据地址获取到该饲料厂所在的
经纬度
[0036]
令图像识别出来的饲料厂经纬度为使用最近邻法,依次计算与名单内已知饲料厂经纬度的2范数,再匹配范围δ内最近邻饲料厂的信息,如果2范数不在设定的范围δ内,则判定为新发现的饲料厂:若则匹配最近邻的饲料厂信息;若则判定为新发现的饲料厂。
[0037]
与现有技术相比,本发明的有益效果是:
[0038]
本发明中,通过通过对遥感卫星影像的自动分析,可以实现在地图上对已存在的饲料厂进行精准的坐标定位,然后结合网络爬虫等技术完善饲料厂的其他信息,同时可以根据饲料厂的卫星图去估算其产能的大小,最终把结果呈现在网页版的地理信息系统里,运行速度方面,使用并行处理技术对程序进行优化,识别速度可达40帧每秒,是原始模型识别速度的三倍,识别效果方面,使用多标签的方式对模型进行修改,模型除了可以识别出具有筒仓特征的饲料厂,只有平仓的饲料厂也可以识别。
附图说明
[0039]
图1为本发明的系统流程图;
[0040]
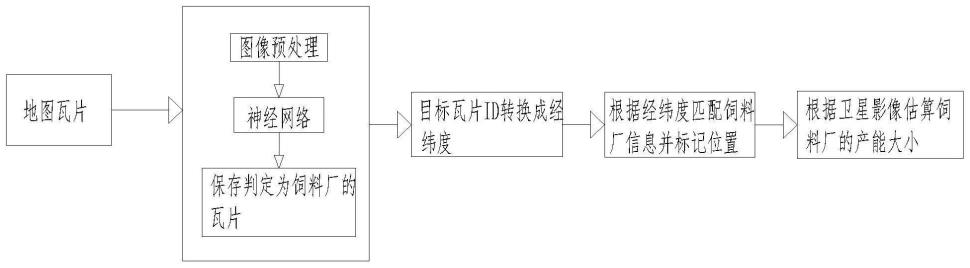
图2为本发明的算法框架图。
具体实施方式
[0041]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0042]
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述,附图中给出了本发明的若干实施例,但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
[0043]
本发明提供一种技术方案:
[0044]
请参阅图1-2,所示的一种基于遥感图像识别的饲料厂标注系统,包括以下遥感图像识别饲料厂的步骤:
[0045]
s1,使用基于图像拼接的深度学习模型训练和识别方法:由于遥感图像瓦片的数量庞大,单张瓦片识别的话效率较低,所以设计了一种基于图像拼接技术的深度学习模型训练和识别方法;
[0046]
s2,根据饲料厂的特征,在给训练样本打标签的时候,重点对筒仓和生产车间进行标注;
[0047]
s3,使用油桶标签数据的迁移学习方法,来解决样本量不足的问题;
[0048]
s4,根据瓦片id推算地理经纬度的方法;
[0049]
s5,使用闭环增强学习去不断提升神经网络的识别精度;
[0050]
s6,设计了一种饲料厂仓储能力的估算方法;
[0051]
s7,设计了一套饲料厂信息匹配的方法。
[0052]
使用基于图像拼接的深度学习模型训练和识别方法:把每4张256*256像素大小的瓦片拼接在一起,生成一张512*512大小的图片,然后用拼接后的图片进行模型的训练和识别(具体方法参照s3),这样可以加快模型训练和识别的速度。经过测试,在不改变识别精度的情况下,速度是原有模型的三倍左右。
[0053]
根据饲料厂的特征,在给训练样本打标签的时候,重点对筒仓和生产车间进行标注:
[0054]
通过对饲料厂卫星影像的观察,发现大部分饲料厂都具有圆筒仓这一特征,所以重点对圆筒仓打标签让模型学习,但是也存在着没有圆筒仓的饲料厂(只有平仓),为了防止漏检这类饲料厂,对生产车间这一特征也打标签进行学习。
[0055]
使用油桶标签数据的迁移学习方法,来解决样本量不足的问题:
[0056]
在模型训练的时候,使用已公开的yolo_v3神经网络框架对已公开的油桶数据集进行学习,然后保存下darknet网络部分的权重参数,并冻结这些参数,再用打完标签的饲料厂数据集,去重新训练神经网络,最终得到整个模型的权重参数。
[0057]
根据瓦片id推算地理经纬度的方法:
[0058]
已知瓦片编号xtile,ytile和瓦片层级zoom这三个参数,可以根据这三个参数计算该瓦片对应的地理经纬度;
[0059]
经度的具体算法如下:
[0060][0061]
纬度的具体算法如下:
[0062][0063]
使用闭环增强学习去不断提升神经网络的识别精度:
[0064]
在模型实际运行的过程中,以行政区域“市”为单位对该片区所有19层级的地图瓦片进行图像识别,最后以行政区域“省”为单位对所有识别结果进行汇总,然后人工剔除掉误判为饲料厂的瓦片,对判断正确的瓦片做更精细的标签,并作成新的数据集,最后在原有的模型基础上进一步训练神经网络,这样不断迭代,可以不断去提升识别的准确率。
[0065]
一种饲料厂仓储能力的估算方法:
[0066]
根据神经网络bounding-box返回的筒仓坐标值进行筒仓容积大小的估算,令bounding-box返回值为[x1x2y1y2],
[0067]
那么筒仓横截面外接矩形的长为:l=(x
2-x1)
×
512
×
0.2986米;
[0068]
那么筒仓横截面外接矩形的宽为:w=(y
2-y1)
×
512
×
0.2986米;
[0069]
其中,512为单张图片的像素点个数,0.2986为19层级下每个像素点对应的物理大小;
[0070]
由于拍摄的角度和计算误差,这两者很多时候并不是相等的,所以两者取平均作为圆筒仓的直径,那么圆筒仓半径为:
[0071][0072]
由于筒仓的设计高度一般跟r成正比,已知圆筒仓的横截面面积:area=πr2,那么
根据体积公式v=πr2h,可以得知v
∝
r3。根据已掌握的饲料厂筒仓容积和该容积下的半径数据,使用最小二乘法,确定方程v=kr3 b,那么之后就可以套用该公式,用图像识别出的半径来估算容积。最后,对该饲料厂所有筒仓容积进行求和,并用该数值来表征饲料厂的仓储能力,进而可以大致判断其产能大小。
[0073]
一套饲料厂信息匹配的方法:
[0074]
首先使用网络爬虫技术,按照已掌握的饲料厂的名单,爬取已公开的饲料厂的各项信息,包括地址、电话、法人等信息,然后调用地图api,根据地址获取到该饲料厂所在的经纬度
[0075]
令图像识别出来的饲料厂经纬度为使用最近邻法,依次计算与名单内已知饲料厂经纬度的2范数,再匹配范围δ内最近邻饲料厂的信息,如果2范数不在设定的范围δ内,则判定为新发现的饲料厂:若则匹配最近邻的饲料厂信息;若则判定为新发现的饲料厂。
[0076]
实施例:使用基于图像拼接的深度学习模型训练和识别方法:由于遥感图像瓦片的数量庞大,单张瓦片识别的话效率较低,所以设计了一种基于图像拼接技术的深度学习模型训练和识别方法;
[0077]
把每4张256*256像素大小的瓦片拼接在一起,生成一张512*512大小的图片,然后用拼接后的图片进行模型的训练和识别(具体方法参照s3),这样可以加快模型训练和识别的速度。经过测试,在不改变识别精度的情况下,速度是原有模型的三倍左右;
[0078]
根据饲料厂的特征,在给训练样本打标签的时候,重点对筒仓和生产车间进行标注:
[0079]
通过对饲料厂卫星影像的观察,发现大部分饲料厂都具有圆筒仓这一特征,所以重点对圆筒仓打标签让模型学习,但是也存在着没有圆筒仓的饲料厂(只有平仓),为了防止漏检这类饲料厂,对生产车间这一特征也打标签进行学习;
[0080]
使用油桶标签数据的迁移学习方法,来解决样本量不足的问题:
[0081]
在模型训练的时候,使用已公开的yolo_v3神经网络框架对已公开的油桶数据集进行学习,然后保存下darknet网络部分的权重参数,并冻结这些参数,再用打完标签的饲料厂数据集,去重新训练神经网络,最终得到整个模型的权重参数;
[0082]
根据瓦片id推算地理经纬度的方法:
[0083]
已知瓦片编号xtile,ytile和瓦片层级zoom这三个参数,可以根据这三个参数计算该瓦片对应的地理经纬度;
[0084]
经度的具体算法如下:
[0085][0086]
纬度的具体算法如下:
[0087][0088]
使用闭环增强学习去不断提升神经网络的识别精度:
[0089]
在模型实际运行的过程中,以行政区域“市”为单位对该片区所有19层级的地图瓦片进行图像识别,最后以行政区域“省”为单位对所有识别结果进行汇总,然后人工剔除掉误判为饲料厂的瓦片,对判断正确的瓦片做更精细的标签,并作成新的数据集,最后在原有的模型基础上进一步训练神经网络,这样不断迭代,可以不断去提升识别的准确率;
[0090]
一种饲料厂仓储能力的估算方法:
[0091]
根据神经网络bounding-box返回的筒仓坐标值进行筒仓容积大小的估算,令bounding-box返回值为[x1x2y1y2],
[0092]
那么筒仓横截面外接矩形的长为:l=(x
2-x1)
×
512
×
0.2986米;
[0093]
那么筒仓横截面外接矩形的宽为:w=(y
2-y1)
×
512
×
0.2986米;
[0094]
其中,512为单张图片的像素点个数,0.2986为19层级下每个像素点对应的物理大小;
[0095]
由于拍摄的角度和计算误差,这两者很多时候并不是相等的,所以两者取平均作为圆筒仓的直径,那么圆筒仓半径为:
[0096][0097]
由于筒仓的设计高度一般跟r成正比,已知圆筒仓的横截面面积:area=πr2,那么根据体积公式v=πr2h,可以得知v
∝
r3。根据已掌握的饲料厂筒仓容积和该容积下的半径数据,使用最小二乘法,确定方程v=kr3 b,那么之后就可以套用该公式,用图像识别出的半径来估算容积。最后,对该饲料厂所有筒仓容积进行求和,并用该数值来表征饲料厂的仓储能力,进而可以大致判断其产能大小;
[0098]
一套饲料厂信息匹配的方法:
[0099]
首先使用网络爬虫技术,按照已掌握的饲料厂的名单,爬取已公开的饲料厂的各项信息,包括地址、电话、法人等信息,然后调用地图api,根据地址获取到该饲料厂所在的经纬度
[0100]
令图像识别出来的饲料厂经纬度为使用最近邻法,依次计算与名单内已知饲料厂经纬度的2范数,再匹配范围δ内最近邻饲料厂的信息,如果2范数不在设定的范围δ内,则判定为新发现的饲料厂:若则匹配最近邻的饲料厂信息;若则判定为新发现的饲料厂;
[0101]
使用最新的深度学习技术,采用较为成熟的yolo-v3架构来搭建模型,对几千家已知饲料厂名单进行筛查,挑选出两千多家有卫星影像数据的饲料厂,并对这些饲料厂的图片分门别类地打上标签,以供模型训练使用,由于训练集的数据量不是很大,在模型网络方面,保持原有的特征提取层级,采用迁移学习的方式,使用预训练的权重,并对输出端的网络进行修改,在高性能gpu服务器上运行完训练模块后,用测试集数据对模型进行评估,再根据结果进一步修改网络,然后再次训练网络,这样反复迭代多次后,挑选出合适的神经网络权重,并将该权重导入最终的模型中,最后加载需要识别的卫星图片,即可完成饲料厂的自动识别,根据神经网络识别出的目标瓦片id,可以推算出对应的地理经纬度,根据经纬度进一步可以匹配饲料厂的信息并在地图上进行标注,最后,结合饲料厂的卫星影像,估算其产能大小。
[0102]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。