deep reinforcement learning for distributed handover management in dense mmwave networks[c],in proc.icassp 2020-2020 ieee international conference on acoustics,speech and signal processing(icassp),pp.8976
–
8980,may 2020.中采用深度多代理rl框架来优化网络吞吐量。然而,此类方案[3][4][5]主要关注地面场景,在此场景中,中断主要由多个bs小区边缘区域中ue的高移动性引起。在这种情况下,可收集的与切换事件相对应的位置相关特征可能相对模糊的,这可能会降低可实现的切换性能。同时,因为bs的实际部署要求因地而异,在海洋场景中,bs只能部署在选定的典型位置,如海岸沿线或岛屿上的山顶,相比之下,在海洋场景中基于位置的特征可能更稳定。因此,为地面系统设计的现有基于dl的波束赋形方案[3][4][5]必须进行调整甚至重构,以期将其应用于海洋通信中。
[0005]
同时,在系统设计中,可以利用与海洋环境中的切换相对应的相对稳定的基于位置的特征。具体而言,将中断现象视为海洋通信场景中的异常事件,这有利于识别其发生情况,以便采取措施减轻其负面影响。当前,现有技术提出了一些识别异常模式的机制,包括基于高斯的异常检测(gaussian based anomaly detection,gad)算法的低延迟解决方案。此算法广泛用于解决基于大数据的异常检测问题。
[0006]
此外,与传统的位置辅助的bv分配方案相比,最近出现的dl技术通过分析位置信息特征以实现高接收信噪比(signal-to-noise ratio,snr),从而提高通信性能,在解决bv分配问题方面显示出巨大的潜力。例如,在文献[6]y.song,j.kang,s.kim,h.jwa,and j.na,fast beamforming strategy:learning the aod of the dominant path[c],in proc.2020 international conference on artificial intelligence in information and communication(icaiic),pp.267
–
271,apr.2020中提出基于ue的位置估计主路径的aod,利用深度神经网络(deep neural network,dnn)的快速波束赋形策略。在[7]h.p.tauqir and a.habib,deep learning based beam allocation in switched-beam multiuser massive mimo systems[c],in proc.2019 second international conference on latest trends in electrical engineering and computing technologies(intellect),pp.1
–
5,jan.2019.中,研究者使用卷积神经网络(convolutional neural network,cnn)设计了m-mimo系统的bv分配方案。其他研究人员利用方向和位置信息,开发了一种用于毫米波(millimeter wave,mmwave)通信的基于dnn[8]s.rezaie,c.n.manchn,and e.de carvalho,location-and orientation-aided millimeter wave beam selection using deep learning[c],in proc.icc 2020-2020 ieee international conference on communications(icc),pp.1
–
6,jul.2020.数据驱动的bv分配方案。然而,上述方案[6][7][8]几乎没有考虑切换事件或海洋场景的特定特性。
技术实现要素:
[0007]
本发明针对上述现有技术中至少一种技术缺陷,提供一种大规模多天线海洋通信系统的波束分配方法,即一种适用于m-mimo海洋通信系统的位置辅助的基于gad和cdbn的bv分配方法,简称为lgcb方法,其适用于m-mimo海洋通信系统的位置辅助,有效提高系统性能。
[0008]
为解决上述技术问题,本发明的技术方案如下:
[0009]
一种大规模多天线海洋通信系统的波束分配方法,包括以下步骤:
[0010]
s1:构建具有若干个bs和一个ue的海洋m-mimo通信场景模型,假设ue在第t-1个位置,获取ue从出发点到第t-1个位置的历史轨迹信息和规划航道信息;
[0011]
s2:构建gad模型和cdbn模型,基于规划航道信息与历史轨迹信息构建gad特征向量和cdbn特征矩阵及其对应标签;gad标签用于预测ue下一个位置发生中断的标志,即预测ue在第t个位置发生中断的标志,cdbn标签用于预测bv分配结果;
[0012]
s3:将gad特征向量、cdbn特征矩阵分别作为gad模型、cdbn模型的输入,对gad模型、cdbn模型进行训练,得到训练完成的gad模型和cdbn模型;利用训练完成的模型,得到测试过程中的gad标签及cdbn标签,从而辅助步骤s4-s7,进行bv分配;
[0013]
s4:若预测ue在第t个位置发生中断,此时服务该ue的bs向邻近bs广播ue的历史轨迹信息;
[0014]
s5:根据第t个位置的bv分配结果计算bs选择接收bv的索引,同时获取ue第t个位置实时的中断状态;若中断未发生,执行步骤s6,若中断发生,执行步骤s7;
[0015]
s6:ue向服务该ue的bs报告当前状态,将位置信息增加到ue的历史轨迹信息中并结束流程,开始对第t 1个位置的bv分配过程;
[0016]
s7:由ue决定进行一个常规的harq或一个随机的接入过程;若进行harq,ue向服务该ue的bs发送重传丢包请求,基于ue的实时位置信息,bs保持原来的bv分配结果或选择更合适的bv配对结果给ue;若进行随机的接入过程,在重新选择服务bs后,ue与原来服务的bs重接或接入新的bs,无论是哪种连接情况,连接到的bs将开始对第t 1个位置的bv分配过程;
[0017]
其中:bs表示基站;ue表示用户设备;m-mimo通信场景模型表示大规模多输入多输出通信场景模型;gad模型表示高斯异常检测算法模型;cdbn模型卷积深度置信神经网络模型;bv分配结果表示波束向量分配结果;harq为hybrid automatic repeat request,表示混合自动重传请求。
[0018]
上述方案中,测试过程中的gad标签及cdbn标签共同辅助步骤s4-s7,完成bv分配过程。具体来说:测试过程中,gad标签用于预测第t个位置是否发生中断,cdbn标签为第t个位置预测bv分配结果。
[0019]
与现有技术相比,本发明技术方案的有益效果是:
[0020]
本发明提出一种大规模多天线海洋通信系统的波束分配方法,针对海洋通信场景构建了gad模型,利用规划航道信息和ue的位置信息,来提高系统性能;同时,将bv分配问题转化为一个基于位置的人工灰度分类问题,其次利用cdbn模型根据位置相关的特征矩阵,预测预定义码本中的bv索引,其适用于m-mimo海洋通信系统的位置辅助,有效提高系统性能。
附图说明
[0021]
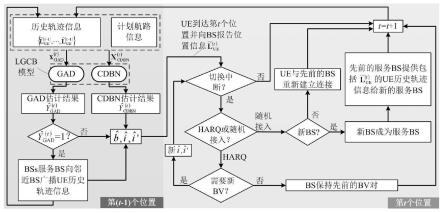
图1为本发明中一种大规模多天线海洋通信系统的波束分配方法的部署流程图;
[0022]
图2为本发明一实施例中具有多个bss和一个目标ue的海洋通信场景模型图;
[0023]
图3为本发明一实施例中基于位置信息的海洋收发机模型示意图;
[0024]
图4为本发明一实施例中lgcb方法的训练流程图;
[0025]
图5为本发明一实施例中cdbn模型结构示意图;
[0026]
图6为本发明一实施例中crbm模型示意图;
[0027]
图7为本发明一实施例中切换区baer性能对比图;
[0028]
图8为本发明一实施例中整个测试区域baer性能对比图;
[0029]
图9为本发明一实施例中平均系统数据率性能分析图。
具体实施方式
[0030]
附图仅用于示例性说明,不能理解为对本专利的限制;
[0031]
为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;
[0032]
对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
[0033]
下面结合附图和实施例对本发明的技术方案做进一步的说明。
[0034]
实施例1
[0035]
如图1所示,一种大规模多天线海洋通信系统的波束分配方法,包括以下步骤:
[0036]
s1:构建具有若干个bs和一个ue的海洋m-mimo通信场景模型,假设ue在第t-1个位置,获取ue从出发点到第t-1个位置的历史轨迹信息和规划航道信息;
[0037]
s2:构建gad模型和cdbn模型,基于规划航道信息与历史轨迹信息构建gad特征向量和cdbn特征矩阵及其对应标签;gad标签用于预测ue下一个位置发生中断的标志,即预测ue在第t个位置发生中断的标志,cdbn标签用于预测bv分配结果;
[0038]
s3:将gad特征向量、cdbn特征矩阵分别作为gad模型、cdbn模型的输入,对gad模型、cdbn模型进行训练,得到训练完成的gad模型和cdbn模型;利用训练完成的模型,得到测试过程中的gad标签及cdbn标签,从而辅助步骤s4-s7,进行bv分配;
[0039]
s4:若预测ue在第t个位置发生中断,此时服务该ue的bs向邻近bs广播ue的历史轨迹信息;
[0040]
s5:根据第t个位置的bv分配结果计算bs选择接收bv的索引,同时获取ue第t个位置实时的中断状态;若中断未发生,执行步骤s6,若中断发生,执行步骤s7;
[0041]
s6:ue向服务该ue的bs报告当前状态,将位置信息增加到ue的历史轨迹信息中并结束流程,开始对第t 1个位置的bv分配过程;
[0042]
s7:由ue决定进行一个常规的harq或一个随机的接入过程;若进行harq,ue向服务该ue的bs发送重传丢包请求,基于ue的实时位置信息,bs保持原来的bv分配结果或选择更合适的bv配对结果给ue;若进行随机的接入过程,在重新选择服务bs后,ue与原来服务的bs重接或接入新的bs,无论是哪种连接情况,连接到的bs将开始对第t 1个位置的bv分配过程;
[0043]
其中:bs表示基站;ue表示用户设备;m-mimo通信场景模型表示大规模多输入多输出通信场景模型;gad模型表示高斯异常检测算法模型;cdbn模型卷积深度置信神经网络模型;bv分配结果表示波束向量分配结果;harq为hybrid automatic repeat request,表示混合自动重传请求。
[0044]
在具体实施过程中,本实施例提出一种大规模多天线海洋通信系统的波束分配方
法,针对海洋通信场景构建了gad模型,利用规划航道信息和ue的位置信息,来提高系统性能;同时,将bv分配问题转化为一个基于位置的人工灰度分类问题,其次利用cdbn模型根据位置相关的特征矩阵,预测预定义码本中的bv索引,其适用于m-mimo海洋通信系统的位置辅助,有效提高系统性能。
[0045]
实施例2
[0046]
更具体的,在实施例1的基础上,所述步骤s1具体实现步骤为:
[0047]
如图2所示,构建具有b个bs和一个ue的海洋m-mimo通信场景模型,其中,bs设置在岸边或岛屿上,ue在一帧内只与单个bs建立连接;每个bs装配有具有m个天线阵元的ula,ue装备一个具有n
rx
天线的ula;同时,bs已知ue的规划航道信息,且通过全球定位系统(global positioning system,gps)和北斗系统了解航行过程中ue的实时位置信息;其中,ula为uniform linear array,表示均匀线性阵列;n
rx
表示接收天线数。
[0048]
在具体实施过程中,规划的航道可被划分为t个gps坐标离散点。由于实际原因,船舶的实际移动通常与规划航道有或多或少的不同,因此还使用规划航道周围的t采样点来表示ue的实际位置。特别的,如图2中的虚线圆圈所示的区域表示相邻bs的小区边缘区域之间的切换区域,在此区域,有必要确保平滑切换以满足服务质量(quality-of-service,qos)要求。基于规划的航道和ue的实际轨迹,本实施例设计的lgcb方法将允许bs在ue到达下一个位置之前预测和准备近似最佳的bv,从而提高系统性能。
[0049]
更具体的,对海洋m-mimo通信场景模型的通信过程进行介绍。具体来说,介绍海洋通信的大规模衰落信道模型和m-mimo波束形成通信系统的收发器结构。
[0050]
(a)信道模型
[0051]
图3展示了包含bs b和ue的海洋通信场景模型。令定义第b个bs的位置向量,b=1,...,b;为3
×
1向量,每一维度对应特定bs的三维坐标;令和分别定义规划航道和实际航路上的第t个离散位置点,t=1,...,t,t为规划航道周围的t采样点,表示ue的实际位置,则:
[0052][0053]
其中e
(t)
表示偏航,其具体取值通过卫星定位系统获得;由此得到位置偏移的期望值:
[0054]
e=ε(||e
(t)
||2)
ꢀꢀꢀꢀ
(2)
[0055]
其中,ε(
·
)表示期望,||
·
||2为模2范数;利用第二个式子(2)得到bs b和ue的第t个实际位置之间的los距离为[1]:
[0056][0057]
现考虑两种典型的海洋通信场景,即:近海岸(near-shore,ns)和远海岸(off-shore,os)通信场景,其大尺度衰落模型表示为:
[0058]
对于海洋通信中的近海岸通信场景,使用经验损耗rician衰落模型来描述大尺度衰落:
[0059]
[0060]
其中,ω表示路径损耗指数;
[0061]
对于海洋通信中的远海岸通信场景,采用一种修正的受瑞利衰落影响的双射线反射模型来描述大尺度衰落:
[0062][0063]
其中,λ表示信号波长,和h
ue
分别代表了第b个bs和ue的天线高度;
[0064]
总的来说,定义海洋通信场景大尺度衰落为g
b,(t)
,则基于第四个式子(4)和第五个式子(5),有:
[0065][0066]
考虑海洋通信场景大尺度衰落模型,n
rx
×
m的信道矩阵h
b,(t)
表示为[6]:
[0067][0068]
其中,和ar分别为m
×
1和n
rx
×
1的向量,分别代表bs b和ue的天线响应,(
·
)h定义了矩阵的厄米特变换;
[0069]
(b)收发机结构
[0070]
受波束赋形方案[2]的启发,将ue的规划航道划分为n
bv
段,然后利用butler方法,根据航道上连续位置形成的不同角度,为每个分段生成bv。在实际训练过程中,ue的规划航道和一些预先测量的实际位置样本可被用于为n
bv
段中的每一个位置产生最优的发送-接收bv对。这样的发送-接收bv对从所有bss和ue之间共享的码本中离线生成。值得注意的是,一个段的最佳发送-接收bv对可能不同于下一个段的最佳发送-接收bv对,这是因为bs覆盖范围内的规划航道段角度取值由其特定形状和路径决定。
[0071]
因此,令和分别表示bs b的发射bv和ue的接收bv,i,i
′
∈{1,...,n
bv
}为分段的索引;当ue移动到其实际轨迹的第(t-1)个位置时,ue通过上行控制信道向bs报告其位置及移动信息,从而获取ue历史轨迹信息。随后,通过训练好的lgcb网络,bs为ue的下一个位置,即第t个位置,从码本中预测最优bv对并将预测bv对的索引通过下行控制链路发送给ue。这样,当ue到达第t个位置时,bs和ue分别利用传输bv和接收bv进行信息传输。
[0072]
考虑ue移动的不确定性,bs端为ue的第t个位置分配“最佳bv对”的过程可描述为分类问题,进而利用dl算法解决进行解决。注意到,在本实施例中,主要关注发射bv索引i和服务bs索引b,因为接收bv索引i
′
可在选择了i和b之后轻松获得。在本实施例提出的lgcb方案中,采用此收发机模型来生成训练数据集。
[0073]
更具体的,在所述步骤s2中,gad模型和cdbn模型共同构成了lgcb模型,lgcb模型的训练结构如图4所示,在这里将发生中断的样本归类为异常样本。基于gad模型,可以找到异常数据。在重新排列所选bv的标签索引后,再对cdbn模型进行训练,从而进一步提高分类精度。
[0074]
具体的,通过对gad模型、cdbn模型进行训练,得到训练好的lgcb模型,bs为ue的下
一个位置,即第t个位置,从码本中预测最优bv对并将预测bv对的索引通过下行控制链路发送给ue;当ue到达第t个位置时,bs和ue分别利用传输bv和接收bv进行信息传输;其中:
[0075]
训练数据集由特征向量/矩阵和标签组成,特征向量/矩阵和标签的对应关系描述了ue位置与bv之间的关系;特别的,受到文献[9]r.r.h.lee and a.ng,unsupervised learning of hierarchical representations with convolutional deep belief networks[j],communications of the acm,vol.54,pp.95
–
103,oct.2011的启发,基于矩阵集合ψ生成特征向量/矩阵,其中,矩阵集合ψ中的元素为ue的规划航道和训练轨迹的位置信息转化而得到的矩阵,具体为:
[0076]
构建一个训练区域,将其划分为na×
na个子区域,则整个区域表示为大小为na×
na的矩阵x,每个子区域表示为x中的一个元素;这样,定义ue实际轨迹上的或规划航道上的第t个位置为大小为3
×
1的向量l
(t)
(t=1...,t),此向量转化为x中的一个元素其中,行列索引{i,j},i,j=1,...,na表示了l
(t)
落入相应的子区域的索引;因此,有:
[0077][0078]
其中,||l
(t)-c
i,j
||2表示l
(t)
与大小为3
×
1、表示子区域中心的向量c
i,j
之间的物理距离,同时,f
p
(
·
)表示一系列包括图像归一化、灰度值转换等操作的综合处理过程[9];特别的,注意到为一个散度指标,同时也可视为图像处理领域的一个像素的灰度值。
[0079]
由此,经过上述操作,将ue的位置信息转化为矩阵集合ψ。其矩阵元素矩阵可视为由像素化的“灰度位置”形成的某些“图像”。基于这种与图像的相似性,某些图像处理技术,例如cdbn可用来解决我们的问题,即,本实施例从训练数据中提取ue位置、面向切换的中断和bv分配策略之间关系的特征。
[0080]
更具体的,下面对如何生成gad和cdbn训练数据集的细节进行介绍。具体来说,训练数据可以分为特征向量和标签,介绍gad和cdbn的训练数据集。
[0081]
(a)gad训练数据集
[0082]
在所述步骤s2中,gad模型训练数据集的获取过程具体为:
[0083]
gad模型输入包含了gad特征向量和gad标签,将定义gad特征向量,每个对应一个gad标签,其中,t=1,...,t;在本实施例中,考虑ue移动的连续性和已知/规划的轨迹,如图4左侧所示,用位置坐标构建特征向量具体表示为:
[0084][0085]
其中,对于t∈{1,2},初始值设定为且由第一个式子(1)得到;然后,将第九个式子(9)中的每个向量元素分别代入第八个式子(8)中的l
(t)
;这样,从矩阵集合ψ中提取三个相关散度值来构建gad向量注意到,对于ue的第(t-1)个位置,在第九个式子(9)中,仅考虑最近的ue实际轨迹信息九个式子(9)中,仅考虑最近的ue实际轨迹信息和下一时刻ue规划的航道信息而非整个规划航道信息,这样的操作使得特征向量的维度减小,进而可以获得相对较低的计算复杂度。
[0086]
此外,每个对应一个标签这个标签反映了潜在的由切换引发的中断的标志,具体而言,定义:
[0087][0088]
其中,令表示当ue在第t个位置时测量的接收snr,表示为:
[0089][0090]
其中,h
b,(t)
表示ue实际轨迹中第t个位置上的信道矩阵,由实际测量或第七个式子(7)计算得到,ρ2表示加性高斯白噪声的功率,ρ满足均值为0,方差为σ2的复高斯分布,即:同时,在第十一个式子(11)中,b定义了基于ue规划航道的第t个位置设计的服务bs的索引,i和i
′
分别表示bs选择的发射和接收bv的索引;为了得到i和i
′
的取值,首先将第三个式子(3)中的替换为ue规划航道的第t个位置进而计算d
b,(t)
;随后,通过将d
b,(t)
代入第四个式子(4)、第五个式子(5)、第六个式子(6)中,计算得到g
b,(t)
,进而利用第七个式子(7)来计算信道矩阵随后,得到:
[0091][0092]
基于第十个式子(10)中的取值,将位置索引集{1,...,t}分为两个子集,即:gad正常数据集(gad normal set,gad-n)和gad异常数据集(gad anomaly set,gad-n)其中:
[0093][0094]
此外,通过随机选择中t
gad-p
个元素来构成gad预训练集(gad pre-training set,gad-p)并将中剩余的所有元素和中的元素归为gad交叉校验集(gad cross examination set,gad-c)其中,中共有t
gad-c个
元素;为了便于表达,将上述集合之间的关系总结如下:
[0095][0096][0097][0098][0099]
t
gad-c
=t
gad-n-t
gad-p
t
gad-a
ꢀꢀꢀꢀ
(18)
[0100]
至此,得到gad模型的训练数据集。
[0101]
(b)cdbn训练数据集
[0102]
在所述步骤s2中,cdbn模型的训练数据集获取过程具体为:
[0103]
如图4所示,令和分别定义为cdbn的特征矩阵及对应标签;是一个由矩阵集合ψ中的元素构成的大小为nv×
nv的矩阵,包含了整个航道的信息和从起点到第(t-1)个样本的实际轨迹信息;此外,相对应的标签表示了系统为第t个位置预测的bv索引,表示为:
[0104][0105]
其中,对于给定的b,bv索引i∈{1,...,n
bv
}由第十二个式子(12)决定;假设在第t个位置,ue仅接入一个bs,则基于第十九个式子(19)获得cdbn的分类类别总数:
[0106][0107]
经过系统训练和实际场景中的部署,我们注意到只要确定,b和i这两个分别对应着服务bs和其对于第t个位置的bv分配结果的参数,便由第十九个式子(19)唯一确定;特别的,如果分别定义和表示的商和余数,则获得服务bs索引表示为:
[0108][0109]
同时,对第t个位置分配的bv的索引表示为:
[0110][0111]
至此,得到cdbn模型的训练数据集。
[0112]
更具体的,基于训练数据集,图4所示gad和cdbn的训练过程具体处理过程如下。
[0113]
(a)gad训练过程
[0114]
gad算法具有分析特征和异常现象之间的相关性的能力,被广泛应用于数据中心监测和网站用户行为检测中[10]a.saci,a.al-dweik,and a.shami,autocorrelation integrated gaussian based anomaly detection using sensory data in industrial manufacturing[j],ieee sensors journal,vol.21,pp.9231
–
9241,jan.2021.[11]l.wang,j.yu,l.shi,s.lu,h.pang,h.chen,z.mei,m.xu,and l.qian,anomaly monitoring in high-density data centers based on gaussian distribution anomaly detection algorithm[c],in proc.2020 ieee international conference on advances in electrical engineering and computer applications(aeeca),pp.836
–
841,oct.2020。值得注意的是,通信系统中的中断状态似乎与数据中心监测和网站用户行为检测场景中异常数据或异常用户状态有相似的结构特征。这启发采用gad算法思想来检测中断事件(常发生在切换区域),进而促使bs在bv分配上做出更好的决策。如前所述,本实施例将ue的位置信息转化为图像像素化灰度值的散度向量,中断检测问题可以看作是图像处理中的区域划分问题[9]。由此,任务变成了在整个训练区域中寻找如图2所示的切换区域中,预测中断发生的子区域。
[0115]
为了达到这个设计目标,利用对gad模型进行训练,这样,基于第九个式子(9)得到的gad特征向量与第十个式子(10)定义的中断标志之间的关系特征将被提取出来;具体而言,将估计的中断标志表示为:
r.d.gitlin,accelerating beam sweeping in mmwave standalone 5g new radios using recurrent neural networks[c],inproc.2018 ieee 88th vehicular technology conference(vtc-fall),pp.1
–
4,apr.2018不同,cdbn的优点是,即使在训练过程中缺少标记数据,依然可通过无监督预训练步骤进行训练[9]。这意味着在极端情况下,如果标记数据不可用或不足,cdbn仍然可以进行初步训练。
[0131]
基于以上考虑,本实施例以提高实际海洋通信场景部署适应性和灵活性为目标,利用cdbn来解决bv分配问题。在所述步骤s3中,对cdbn模型的训练过程具体为:
[0132]
如图5所示,将cdbn模型视为一个由多个最大池化的crbm堆叠而成的网络,crbm为convolutional restricted boltzmann machine,表示卷积受限玻尔兹曼机;定义cdbn模型中crbm的数量为nr,对于μ=1...,nr,第μ个最大池化的crbm包含一个可视层v
μ
、一个检测层d
μ
和一个池化层p
μ
;具体而言,nv×
nv矩阵为cdbn模型的输入v,这也是第一个crbm的输入;此外,cdbn模型的输出层o为向量,每个元素对应一个单元,其中,第i个单元表示了被分入第i类的概率,总体而言,如图5所示,cdbn模型包含如下的若干层:
[0133][0134]
不失一般性的,对于第μ个crbm的结构,如图6所示,第μ个crbm包含以下三层:
[0135]
1)可视层v
μ
:包含u
μ
个大小为n
v,μ
×nv,μ
的矩阵
[0136]
2)检测层d
μ
:包含k
μ
个大小为n
d,μ
×nd,μ
的矩阵
[0137]
3)池化层p
μ
:包含k
μ
个大小为n
p,μ
×np,μ
的矩阵
[0138]
令表示对矩阵a进行水平和垂直翻转,则有[9]:
[0139][0140][0141]
其中,为连接和第k个大小为n
w,μ
×nw,μ
的权重矩阵,n
w,μ
=n
v,μ-n
d,μ
1;为检测层大小为n
d,μ
×nd,μ
,元素为的偏置矩阵;c
μ
为可视层大小为n
v,μ
×nv,μ
,元素为c
μ
的偏置矩阵,*表示卷积运算;其中,中的所有单元共享相同的和v
μ
的所有单元共享相同的c
μ
;cdbn模型训练过程的目标是优化包含;cdbn模型训练过程的目标是优化包含和c
μ
在内的网络参数;然而,由第二十九个式子(29)、第三十个式子(30)得到,和c
μ
取决于多个耦合变量和因此,需要对其进行解耦合,进而计算和c
μ
的优化结果;
[0142]
图6展示了图5所示的cdbn中第μ个crbm的结构,其中,利用第二十九条式子(29)、第三十条式子(30)将与进行卷积,生成的每个单元,直到构建完整的检测层d
μ
;随后,将分为n
b,μ
个大小为n
c,μ
×nc,μ
的不相交的块,令表示第α个块,α=1,...,n
b,μ
;为表述方便,定义为从矩阵中选择第α个块的操作,则更进一步的,每个只与池化层组中的一个单元相连,此单元用于提取高层的特征信息[9],有当第μ个crbm的池化层p
μ
生成后,将其用于第μ 1个crbm的可视层v
μ 1
,即:
[0143]
[0144]
其中u=k,u
μ 1
=k
μ
和μ=1,...,n
r-1;其次,如图5所示,通过拼接k
μ
个矩阵中每一列的元素,将nr个crbm中的nr个池化层p
μ
重排为大小为lr×
1的向量r,随后,一个大小为的权重矩阵将向量r映射为输出o;为表述方便,定义cdbn模型的目标训练参数为:
[0145][0146]
接着,对所有的crbm引入一个无监督预训练过程以得到式(32)中的优化参数接着,对所有的crbm引入一个无监督预训练过程以得到式(32)中的优化参数和c
μ
,进而提高下一步cdbn模型训练过程的学习能力;
[0147]
最后,基于预训练所得到的参数,利用有限存储的broyden-fletcher-goldfarb-shanno算法,即l-bfgs算法进一步训练cdbn模型,最终完成cdbn模型的训练;
[0148]
所述无监督预训练过程具体为:
[0149]
为了描述预训练过程,定义相关函数和运算操作:
[0150]
1)sigmoid函数定义为:
[0151]
2)求和函数f
sum
(x)表示对给定向量/矩阵x的所有元素求和;
[0152]
3)gibbs采样函数定义为:
[0153][0154]
其中,∈∈(0,1)为随机数,xi和yi分别为向量x和y的第i个元素;第一个crbm到最后一个crbm的预训练过程中,第μ个crbm的可视层表示为:
[0155][0156]
其中,对于u=1,...,u
μ
,上标(
·
)
《j》
表示预训练中的第j个阶段,根据两步对比散度算法[9],设j∈{0,1};随后,将定义为检测单元被激活的概率[9]:
[0157][0158]
通过设第三十五个式子(35)中j=0,得到并以此重构第二阶段的可视层:
[0159][0160]
这样,通过第三十六个式子(36),设j=1,计算第三十五个式子(35)中的
[0161]
经过运算,对目标参数和c
μ
进行更新:
[0162][0163][0164][0165]
其中,和c
μ
初始化为0,由高斯分布初始化,λ
cdbn
为学习率;此外,第三十八个式子(38)中为:
[0166][0167]
其中,ζ为目标稀疏度。基于第三十七个式子(37)-第三十九个式子(39)更新过的参数,生成池化层矩阵具体来说,令定义第α个池化单元被激活的概率,则
[0168][0169]
利用第四十一个式子(41)中的概率,构建矩阵:
[0170][0171]
其中,α=j
p
n
p,μ
(i
p-1),i
p
=1,...,n
p,μ
和j
p
=1,...,n
p,μ
分别为中元素所属行和列的索引;将第四十二个式子(42)代入第三十四个式子(34)中,进行下一个crbm的预训练过程;
[0172]
所述l-bfgs算法对cdbn模型[13]d.chang,s.sun,and c.zhang,an accelerated linearly convergent stochastic l-bfgs algorithm[j],ieee transactions on neural networks and learning systems,vol.30,pp.3338
–
3346,jan.2019,进一步训练的过程具体为:
[0173]
对于第t个位置,给定的第二十九个式子(29),第三十个式子(30),第三十一个式子(31)和第四十二个式子(42),得到优化过后的并用nr个池化层输出重排得到r
(t)
;
[0174]
随后,利用softmax模型生成cdbn模型输出层的输出,进而得到对的估计:
[0175][0176]
其中,θ由高斯分布初始化;更进一步的,为提高训练过程收敛速度,不同于二次损失函数[6],本实施例采用如下损失函数:
[0177]
其中,fb(x)为布尔函数,定义为:
[0178][0179]
基于第四十四个式子(44),第三十二个式子(32)定义的参数集χ
cdbn
,通过l-bfgs算法[13]更新如下:
[0180][0181]
随后更新后的θ用于计算值得注意的是,第四十三个式子(43),第四十四个式子(44)到第四十六个式子(46)的过程反复迭代直到j
cdbn
小于一定门限,此时cdbn模型训练过程完成。
[0182]
更具体的,本实施例给定经过训练的gad模型和经过训练的cdbn参数集χ
cdbn
(如式(46)所示),即可根据图1中概述的系统部署方式,为实际海洋通信场景部署本实施例提出的方案。
[0183]
不失一般性的,假设ue在第(t-1)个位置。基于从出发点到第(t-1)个位置收集的历史位置信息,和规划航道位置信息,如图1所示。在所述步骤s3中,gad特征向量由服务ue的bs利用第九个式子(9)计算生成,cdbn特征矩阵由矩阵集合ψ中挑选得到;在所述步骤s4中,gad标签表示为cdbn标签表示为其中:
[0184]
gad标签用来预测ue下一个位置,具体来说,说明由切换带来的中断可能在ue的第t个位置发生;因此,服务bs应为潜在的切换做好准备,将ue的历史轨迹信息广播给临近bss;
[0185]
cdbn标签基于第二十一个式子(21)和第二十二个式子(22)用来预测bv分配结果
[0186]
其次,ue继续移动并到达第t个位置,并将最近的位置信息报告给bs。注意到尽管第t个位置的中断状态已通过得到了预测,实际中依然存在预测错误的情况,这种情况往往是由于ue移动方向的临时变化等原因导致ue出现在了一个意料之外的第t个位置而引起的。因此,本实施例在实际实施过程中,需要检测实际情况中,中断究竟是否发生,以便在必要时及时修改预测的bv分配。
[0187]
随后,在所述步骤s5中,分别用和替换第十二个式子(12)中的b和i,基于通过使第十一个式子(11)中接收snr最大计算得到bs选择接收bv的索引此时,利用第十个式子(10),比较与门限γ
ho
之间的大小关系,获取ue第t个位置实时的中断状态。则有以下两种情况:
[0188]
1)情况1:当中断未发生时,ue向服务bs报告当前状态,这会使得位置信息增加到ue历史轨迹信息中。随后,系统进行针对下个位置,即第t 1个位置的bv分配过程。
[0189]
2)情况2:当中断发生时,ue将决定是进行一个常规的harq还是一个随机接入过程。
[0190]
如果需要进行harq,ue向服务bs发送重传丢包的请求。基于ue实时位置信息,bs可选择保持原来的bv对或选择更为合适的bv对给ue。
[0191]
如果需要进行随机接入,在小区选择过程后,ue可能与原来服务bs重接或接入新的bs。无论何种情况发生,连接到的bs将开始lgcb过程,利用规划航道信息和来自前一个服务bs的、包含了的历史位置信息,为第t 1个位置选择bv,进而实现对第t 1个位置的bv分配过程。
[0192]
本实施例针对海洋通信场景构建了基于gad模型,利用规划航道信息和ue的位置信息,来提高系统性能。此外,受到基于dl的图像处理算法的启发,本实施例首先将bv分配问题转化为一个基于位置的人工灰度分类问题,其次利用cdbn根据位置相关的特征矩阵,预测预定义码本中的bv索引。同时,本实施例采用gad算法对cdbn训练数据进行调整,使得bv分配结果更加准确,进而获得相较于传统方案更高的容量性能。
[0193]
相比与现有技术,本实施例基于gad算法的原理,分析了ue的切换性能。具体而言,通过提取ue位置信息与中断事件之间的关系,将基于散度特征的人工图像区域划分任务分解到概率空间中,便于进行切换过程中对中断事件的检测,进而提高网络的容量和本方案
对实际海洋环境的适应性。同时,本实施例在dl辅助图像处理方法原理的启发下,进一步将bv分配问题转化为基于位置的人工灰度值分类问题。具体来说,在构建cdbn时,考虑了中断事件,并根据目标ue的规划航道信息和相关位置构建基于位置的特征矩阵。基于经过训练的cdbn,提出的lgcb方案能够预测并优化ue下一个位置的bv,从而提高系统性能。此外,本实施例设想了一种基于gad预测的面向切换的中断结果,通过搜索邻小区bss来校正cdbn训练数据的方法,从而进一步提高训练性能。
[0194]
实施例3
[0195]
为评估基于lgcb的bv分配方案的准确性,本实施例定义称为bv分配错误率(bv assignment error rate,baer)为:
[0196][0197]
其中,t
l
为测试位置数,函数fb(
·
)的定义如式(45)所示。更进一步的,本实施例可计算出相对系统带宽归一化的平均系统数据率:
[0198][0199]
其中,基于本实施例分别通过式(21)和式(22)计算得到和进而代入式(11)计算得到估计snr值得注意的是,可由bs决定,并通过下行控制链路发送给ue。
[0200]
(1)仿真参数设置
[0201]
作为一般的例子,本实施例测试了分别对应着ns和os信道(其特征分别由式(4)和式(5)描述)的两种海洋通信场景。除非特别说明,主要仿真参数如表1所示,其中,e,t和n
bv
的值随不同仿真变化,表示不小于x的最大整数。更进一步地,本实施例选择以下方案作为性能对比方案:
[0202]
1)基于dl的方案:位置信息辅助的基于gad和dbn[14]y.hua,j.guo,and h.zhao,deep belief networks and deep learning[c],in proc.proceedings of 2015 international conference on intelligent computingand internet of things,pp.1
–
4,jan.2015的bv分配(location-aided gad and dbn based bv assignment,lgdb)方案,位置信息辅助的基于cdbn[9]的bv分配(location-aided cdbn based bv assignment,lcb)方案。
[0203]
2)非dl的方案:位置信息辅助的基于外插值的bv分配(location-aided extrapolation based bv assignment,leb)方案[15]m.-h.chiu and m.a.bassiouni,predictive schemes for handoff prioritization in cellular networks based on mobile positioning[j],ieee journal on selected areas in communications,vol.18,pp.510
–
522,mar.2000,传统的基于应答机制的bv分配(reply-required mechanism based bv assignment,rrb)方案[15]。
[0204]
表1仿真参数表
[0205][0206]
(2)波束分配性能
[0207]
本实施例比较本发明所提出的lgcb方案和其他对比方案,包括:lgdb,lcb和leb的baer性能。值得注意的是,式(47)中定义的baer不适用于rrb方案,因为rrb方案没有预测bv分配的功能。
[0208]
a.切换区的波束分配性能
[0209]
由于本发明提出的lgcb方案的目标是在考虑切换区影响的情况下解决bv分配问
题,本实施例首先在图7中证明在考虑ns和os两种场景下切换区的性能。更具体地说,在图7(a)和图7(b)中,分别讨论了不同位置偏移e={3,6}km,训练位置数t=18000时的性能。可看到,当bv数n
bv
增大时,baer增大。这是符合预期的,因为当需要区分更多数据类别时,bv分类性能会下降。本发明提出的lgcb方案相比于其他三个方案,可提供最低的baer。此外,比较图7(a)和图7(b),可以注意到ns场景性能普遍优于os场景,这是因为ns场景中训练得到的特征通常比os场景所得到的特征简单。这是因为考虑物理位置、天气条件等的限制,ue在ns场景下的运行轨迹通常比在os场景下更有规律。
[0210]
此外,如图7(c)和图7(d)所示,本实施例设n
bv
={20,40},t=18000,当位置偏移增大时,baer性能下降,这是因为更大的偏移为针对ue下一个位置的bv预测带来更高的难度。同样的,与其他方案相比,lgcb方案依旧保持着较低的baer。这说明了本发明方案的一个明显增益,因为它意味着,即使在切换区,本发明所提出的方案在应对航道偏离规划的航道方面也比现有方法更稳定,而因为受到地理、天气或其他因素的影响,这种偏离航道的轨迹可能经常在海洋通信中发生。
[0211]
同时,图7(e)和图7(f)的结果表明,当n
bv
=20和e={3,6}km时,如果采用更大的训练数据量t,可以大大提高基于dl方案的可达的baer性能。例如,当t大于约14100和15000时,本发明提出的lgcb方案在e=3km和e=6km时,性能优于非dl的leb方案。
[0212]
从图7中,可以得出结论:尽管ue更容易在切换区发生中断,但通过在lgcb方案中使用gad模型,可有效降低baer。然而,由于lcb和leb方案没有考虑切换区的影响,它们无法获得这样的增益。
[0213]
b.整个测试区域的波束分配性能
[0214]
在图8中,本实施例采用与图7相同的参数集,将测试区域从切换区扩展到整个测试区域。在相同的配置下,可以看到,所有方案的性能都明显优于图7,这是因为切换区域以外的大部分区域的中断概率可能要低得多。此外,图8曲线的趋势与图7中所记录的趋势相似,本发明提出的lgcb方案在所有测试中均可获得最好的性能。
[0215]
(3)平均系统数据率性能分析
[0216]
作为进一步的研究,在图9中,基于式(48)讨论各种方案的归一化平均系统数据率r性能。
[0217]
更具体地说,图9(a)和图9(b)中,设t=18000和e={3,6}km,由图可见,当bv数,n
bv
从一个小值增加到大约25时,r可以提高。这是由于当有更多的bv可选择时,系统可获得更大的波束赋形增益。然而,对于除了rrb的所有方案,波束赋形获得增益可能在当n
bv
增大到一定值(如20或25)后,被n
bv
增大带来的bv预测错误概率的提高抵消。这种bv预测错误概率的提高可能是由于n
bv
的增大超过了固定训练数据t=18000下网络最大学习能力而造成的。在这种情况下,如图9(a)和(b)所示,当n
bv
超过阈值20或25时,这些方案的r开始下降。相比之下,传统的rrb方案在码本较小时,r较低,这是因为它只有在停机时被动更新bv索引,由此避免了bv预测错误(特别是大n
bv
的情况),只享受波束赋形增益。在任意情况下,就r而言,本发明所提出的lgcb方案在ns和os场景中均优于其他方案。
[0218]
另一方面,本实施例分别在图9(c)和图9(d)中测试了系统在不同e下ns和os两种场景的性能。设t=18000和n
bv
={20,40},当e增大时,r减小,这是因为与规划航道的偏差越大,预测下一个位置的正确bv就越困难,这将导致可实现平均系统数据率的下降。
[0219]
最后,在图9(e)和图9(f)中,本实施例设e={3,6}km和n
bv
=20,本发明提出的lgcb方案在t相对较大时可获得最佳性能。例如,在ns场景中,当e=3km时,lgcb可在t>12900时获得相比于其他方案最高的平均系统数据率。以上仿真结果均验证了lgcb方案在不同配置下的有效性。
[0220]
综上所述,本发明利用位置信息,为m-mimo海洋通信系统设计了一种有效的bv分配方案。具体来说,利用实际位置和规划航道信息,基于gad算法分析切换性能,进而提供平滑切换和高容量。然后,将bv分配问题转化为一个分类问题,并利用提出的cdbn分析位置特征矩阵,准备bv分配结果,以进一步提高通信性能。大量仿真结果表明,在典型的ns和os海洋通信场景下,新的lgcb方案在bv分配精度和容量方面都优于现有的解决方案,比传统方法有显著的性能增益。
[0221]
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。