1.本发明涉及土地测绘技术领域,特别涉及适用于多环境的国土空间规划地形测量装置。
背景技术:
2.测量地面进行规划的时候,需要测量地面的实际长度是否可以规划,通过人工前进的方式效率慢,在红外线测量不便应用的地点,一般会利用机械装置进行距离测量。
3.然而,目前使用的测量装置主要为定点后测量,缺乏能够设定基点后远程遥控测量的精准物理测量功能,辅助规划的效果不足,并且不便根据需要投掷标记,缺乏提供标记显示的功能。
技术实现要素:
4.有鉴于此,本发明提供适用于多环境的国土空间规划地形测量装置,其具有驱行车,可以进行遥控远程测量,通过驱行车展开收拉线,可以配合收拉线进行距离的测量。
5.本发明提供了适用于多环境的国土空间规划地形测量装置,具体包括:t形座,所述t形座的顶部凸块前侧固定设置有握把,握把的前侧固定设置有转座,t形座内设置有储蓄电源;托座,所述托座的底部固定设置有转轴,转轴旋转设置在转座内,且转轴与转座滑动连接;侧座,所述侧座的数量设置为两组,两组侧座固定设置在托座的顶部两侧,两组侧座的顶部固定设置有顶座;计数传感器,所述计数传感器固定设置在右侧侧座的外部;显数器,所述显数器固定设置在右侧侧座的外部;驱行车,所述驱行车的顶部固定设置有顶盖;驱行车的内侧前端固定设置有球管,球管顶部穿过顶盖;筛分通道,所述筛分通道固定设置在球管的顶部;驱行车的底部前侧设置有前轮,驱行车的底部后侧两端旋转设置有后轮,后轮分别设置马达传动连接。
6.可选地,所述托座还包括有:挡座,转轴的底端固定设置有挡座,挡座底部开设有通槽,通槽内铰接设置有两组半尖刺,两组半尖刺对接时构成圆锥柱结构;两组半尖刺的相邻面中间开设有圆槽;磁座,转轴的外部旋转设置有磁座,磁座两侧开设有两组通孔。
7.可选地,所述侧座还包括有:摇杆轴,顶座的顶部中间旋转设置有摇杆轴;传动轴,两组侧座的中间顶部旋转设置有传动轴,传动轴与摇杆轴设置锥齿轮传动连接;收线轮,两组侧座的中间旋转设置有收线轮,收线轮外缠设有收拉线,收拉线前端连接设置有转环;传动轴和收线轮设置齿轮传动连接。
8.可选地,所述侧座还包括有:辊轴,两组侧座的前侧旋转设置有两组辊轴,辊轴的外部中间滑动设置有量线轮,两组量线轮对接,且量线轮的外表面中间为橡胶结构,量线轮外表面中间开设有环槽,收拉线位于环槽中;两组辊轴设置齿轮传动连接。
9.可选地,所述侧座还包括有:凸角轮,上侧辊轴的右端固定设置有凸角轮,凸角轮能够接触计数传感器。
10.可选地,所述驱行车还包括有:铁桩,驱行车的后侧中间固定设置有铁桩,铁桩的
后端固定设置有对接销;天线柱,顶盖的顶部后侧固定设置有天线柱,转环旋转设置在天线柱的外侧。
11.可选地,所述筛分通道还包括有:内轴,筛分通道的内部为单循环通道,筛分通道的中间旋转设置有内轴,内轴的外部固定设置有拨分叶轮;电机,筛分通道的一侧固定设置有电机,电机与内轴传动连接。
12.可选地,所述筛分通道的底部一侧与球管连接相通,筛分通道的顶部连接设置有收容仓,收容仓为漏斗结构。
13.有益效果
14.根据本发明的各实施例的驱行车,提供了设定基点后远程遥控测量的精准物理测量功能,对接销插设在磁座的通孔中,遥控后轮驱动带动驱行车移动,即可将驱行车移动到选取地点,驱行车移动的过程中拉伸收拉线进行放线,在收拉线拉伸的同时带动量线轮旋转,辊轴带动凸角轮旋转间隙触发计数传感器,计数传感器反馈到显数器,显示驱行车的行进距离,进而利用驱行车进行远程自走测量,节省了繁琐的人工校正移动步骤。
15.此外,拨分叶轮的设置,提供了投掷标记功能,在驱行车移动到定点位置的时候,启动电机带动拨分叶轮,利用拨分叶轮将标签推到球管内,从球管的底部排出标签,即可实现标记。
16.此外,收线轮能够手动控制收线,在收线的时候,转动摇杆轴,摇杆轴通过锥齿轮带动传动轴旋转,传动轴带动收线轮旋转,收线轮旋转回收收拉线,将驱行车收回复位,为再次使用提供了方便。
17.此外,半尖刺的设置,提供了方便选择的适应功能,将两组半尖刺合并,然后将挡座放置在地面,将半尖刺按压插入土壤中,实现进一步的固定,如果应用在不便插入土壤的地点,可以直接将两组半尖刺分开,然后踩踏t形座进行固定,提供了多样性固定的方式。
附图说明
18.为了更清楚地说明本发明的实施例的技术方案,下面将对实施例的附图作简单地介绍。
19.下面描述中的附图仅仅涉及本发明的一些实施例,而非对本发明的限制。
20.在附图中:
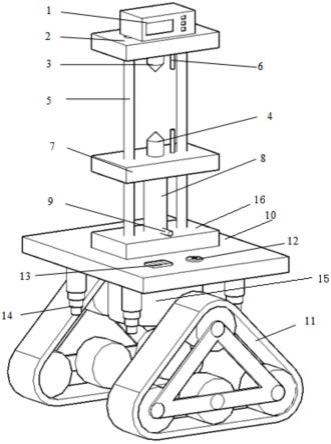
21.图1示出了根据本发明的实施例的立体结构示意图;
22.图2示出了根据本发明的实施例的轴侧结构示意图;
23.图3示出了根据本发明的实施例的侧仰视结构示意图;
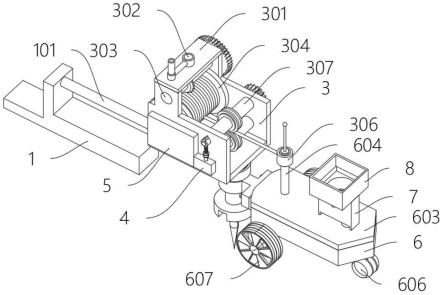
24.图4示出了根据本发明的实施例驱行车的立体剖视结构示意图;
25.图5示出了根据本发明的实施例驱行车的侧仰结构示意图;
26.图6示出了根据本发明的实施例驱行车的内部结构示意图;
27.图7示出了根据本发明的实施例侧座的立体结构示意图;
28.图8示出了根据本发明的实施例托座的立体结构示意图。
29.附图标记列表
30.1、t形座;101、握把;102、转座;2、托座;201、转轴;202、挡座;203、通槽;204、半尖刺;205、圆槽;206、磁座;3、侧座;301、顶座;302、摇杆轴;303、传动轴;304、收线轮;305、收
拉线;306、转环;307、辊轴;308、量线轮;309、凸角轮;4、计数传感器;5、显数器;6、驱行车;601、铁桩;602、对接销;603、顶盖;604、天线柱;605、球管;606、前轮;607、后轮;7、筛分通道;701、内轴;702、拨分叶轮;703、电机;8、收容仓。
具体实施方式
31.为了使得本发明的技术方案的目的、方案和优点更加清楚,下文中将结合本发明的具体实施例的附图,对本发明实施例的技术方案进行清楚、完整的描述。除非另有说明,否则本文所使用的术语具有本领域通常的含义。附图中相同的附图标记代表相同的部件。
32.实施例:请参考图1至图8:
33.本发明提出了适用于多环境的国土空间规划地形测量装置,包括:t形座1,t形座1的顶部凸块前侧固定设置有握把101,握把101的前侧固定设置有转座102,t形座1内设置有储蓄电源;托座2,托座2的底部固定设置有转轴201,转轴201旋转设置在转座102内,且转轴201与转座102滑动连接;侧座3,侧座3的数量设置为两组,两组侧座3固定设置在托座2的顶部两侧,两组侧座3的顶部固定设置有顶座301;计数传感器4,计数传感器4固定设置在右侧侧座3的外部;显数器5,显数器5固定设置在右侧侧座3的外部;驱行车6,驱行车6的顶部固定设置有顶盖603;驱行车6的内侧前端固定设置有球管605,球管605顶部穿过顶盖603;筛分通道7,筛分通道7固定设置在球管605的顶部;驱行车6的底部前侧设置有前轮606,驱行车6的底部后侧两端旋转设置有后轮607,后轮607分别设置马达传动连接。
34.此外,根据本发明的实施例,参考图8,托座2还包括有:挡座202,转轴201的底端固定设置有挡座202,挡座202底部开设有通槽203,通槽203内铰接设置有两组半尖刺204,两组半尖刺204对接时构成圆锥柱结构;两组半尖刺204的相邻面中间开设有圆槽205;磁座206,转轴201的外部旋转设置有磁座206,磁座206两侧开设有两组通孔。
35.此外,根据本发明的实施例,参考图7,侧座3还包括有:摇杆轴302,顶座301的顶部中间旋转设置有摇杆轴302;传动轴303,两组侧座3的中间顶部旋转设置有传动轴303,传动轴303与摇杆轴302设置锥齿轮传动连接;收线轮304,两组侧座3的中间旋转设置有收线轮304,收线轮304外缠设有收拉线305,收拉线305前端连接设置有转环306;传动轴303和收线轮304设置齿轮传动连接;辊轴307,两组侧座3的前侧旋转设置有两组辊轴307,辊轴307的外部中间滑动设置有量线轮308,两组量线轮308对接,且量线轮308的外表面中间为橡胶结构,量线轮308外表面中间开设有环槽,收拉线305位于环槽中;两组辊轴307设置齿轮传动连接;凸角轮309,上侧辊轴307的右端固定设置有凸角轮309,凸角轮309能够接触计数传感器4,提供计数功能。
36.此外,根据本发明的实施例,参考图4,驱行车6还包括有:铁桩601,驱行车6的后侧中间固定设置有铁桩601,铁桩601的后端固定设置有对接销602;天线柱604,顶盖603的顶部后侧固定设置有天线柱604,转环306旋转设置在天线柱604的外侧,方便调整方向。
37.此外,根据本发明的实施例,参考图4,筛分通道7还包括有:内轴701,筛分通道7的内部为单循环通道,筛分通道7的中间旋转设置有内轴701,内轴701的外部固定设置有拨分叶轮702;电机703,筛分通道7的一侧固定设置有电机703,电机703与内轴701传动连接;筛分通道7的底部一侧与球管605连接相通,筛分通道7的顶部连接设置有收容仓8,收容仓8为漏斗结构,可以用于投射标签。
38.本实施例的具体使用方式与作用:本发明中,使用时,预先将两组半尖刺204合并,然后将挡座202放置在地面,将半尖刺204按压插入土壤中,实现进一步的固定,如果应用在不便插入土壤的地点,直接将两组半尖刺204分开,然后踩踏t形座1进行固定。
39.对接销602插设在磁座206的通孔中,遥控后轮607驱动带动驱行车6移动,即可将驱行车6移动到选取地点,驱行车6移动的过程中拉伸收拉线305进行放线,在收拉线305拉伸的同时带动量线轮308旋转,辊轴307带动凸角轮309旋转间隙触发计数传感器4,计数传感器4反馈到显数器5,显示驱行车6的行进距离,进而利用驱行车6进行自走测量。
40.在收容仓8的内部设置标签,标签设置为正十二面体,标签自动掉落到筛分通道7内。
41.在驱行车6移动到定点位置的时候,启动电机703带动拨分叶轮702,利用拨分叶轮702将标签推到球管605内,从球管605的底部排出标签,实现标记。
42.在收线的时候,转动摇杆轴302,摇杆轴302通过锥齿轮带动传动轴303旋转,传动轴303带动收线轮304旋转,收线轮304旋转回收收拉线305,将驱行车6收回复位,回收驱行车6之前先将驱行车6移动到不阻碍标签的位置避免影响定位。
43.最后,需要说明的是,本发明在描述各个构件的位置及其之间的配合关系等时,通常会以一个/一对构件举例而言,然而本领域技术人员应该理解的是,这样的位置、配合关系等,同样适用于其他构件/其他成对的构件。
44.以上所述仅是本发明的示范性实施方式,而非用于限制本发明的保护范围,本发明的保护范围由所附的权利要求确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。