技术特征:
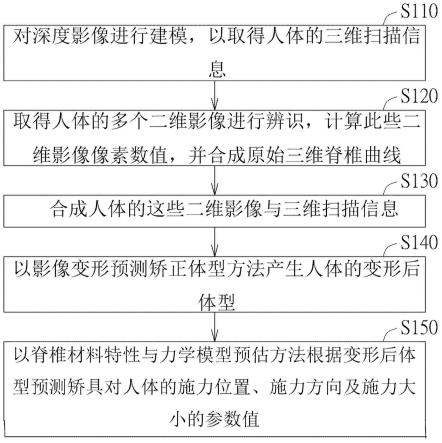
1.一种三维影像动态矫正评估与矫具辅助设计方法,包括:取得人体的三维扫描信息;取得该人体的多个二维影像进行辨识,计算该些二维影像像素数值,并合成原始三维脊椎曲线;合成该人体的该些二维影像与该三维扫描信息;以影像变形预测矫正体型方法产生该人体的变形后体型;以及以脊椎材料特性与力学模型预估方法根据该变形后体型预测矫具对该人体的施力位置、施力方向及施力大小的参数值。2.如权利要求1所述的三维影像动态矫正评估与矫具辅助设计方法,其中该影像变形预测矫正体型方法包括:将该人体的该些二维影像叠合生成该原始三维脊椎曲线以及矫正后三维脊椎曲线,并将该原始三维脊椎曲线以及该矫正后三维脊椎曲线叠合该人体的外型影像;将叠合后的人体外型影像的多个三角网格的端点各自连结到该原始三维脊椎曲线上最近的点,各自计算该些三角网格上的端点的弹性位能;当该原始三维脊椎曲线逼近该矫正后三维脊椎曲线时,计算该些三角网格上的端点的弹性位能,使该弹性位能达弹性位能最小值,以产生该些端点的位移量;以及依据身体外型参数,以迭代运算计算该些三角网格上的端点的弹性位能使整体弹性位能达最小值,得到新三角网格并根据各自端点的位移量产生该变形后体型。3.如权利要求1所述的三维影像动态矫正评估与矫具辅助设计方法,其中该影像变形预测矫正体型方法包括:将该人体的该些二维影像叠合生成该原始三维脊椎曲线以及矫正后三维脊椎曲线,并将该原始三维脊椎曲线以及该矫正后三维脊椎曲线叠合该人体的外型影像;在该人体内部建立多个中继点,将身体外型的多个三角网格的端点各自连接到最近的中继点,并将该些中继点各自连接到该原始三维脊椎曲线上最近的点;各自计算该些三角网格上的端点及该些中继点的弹性位能;当该原始三维脊椎曲线逼近该矫正后三维脊椎曲线时,计算该些三角网格上的端点及该些中继点的弹性位能,使该弹性位能达最小值,以产生该些端点的位移量及旋转量;以及依据身体外型参数,迭代运算计算该些三角网格上的端点及该些中继点的弹性位能使整体弹性位能达弹性位能最小值,得到新三角网格并根据各自端点的位移量产生该变形后体型。4.如权利要求1所述的三维影像动态矫正评估与矫具辅助设计方法,其中该脊椎材料特性与力学模型预估方法包括:以该人体吊单杠受自重力作用下,取得该人体的该些二维影像,该人体的各脊体与椎间盘受到自重力作用后所产生的位移作为目标函数,进行最佳化回归分析以评估脊体与椎间盘的刚度;以脊椎拉直时施力状态的迭代计算可得到该人体每节椎体与椎间盘元素节点的位移,对该些节点的位移与该目标函数的位移进行误差分析,使该些节点的位移均方根值达到最小值,获得该施力位置、该施力方向及该施力大小的参数值。5.如权利要求4所述的三维影像动态矫正评估与矫具辅助设计方法,其中该最佳化回
归分析包括通过杨氏系数的迭代计算得到每节椎体与椎间盘元素节点的位移,该杨氏系数迭代收敛确认条件为该些节点的位移均方根值达到最小值。6.如权利要求1所述的三维影像动态矫正评估与矫具辅助设计方法,其中取得该人体的该些二维影像进行辨识包括使用文字探测或光学文字辨识自动辨识该些二维影像。7.如权利要求4所述的三维影像动态矫正评估与矫具辅助设计方法,其中该脊椎材料特性与力学模型预估方法包括以有限元素法分析该人体脊椎的生物力学模型,利用具有该人体的冠状面、矢状面的该些二维影像将三维模型降阶为两个冠状面与矢状面二维等效有限元素模型。8.如权利要求1所述的三维影像动态矫正评估与矫具辅助设计方法,其中该动态矫正评估包括依据矫正前后三维体型的变形模型,计算各阶段的变形后体型、该施力位置、该施力方向及该施力大小。9.如权利要求1所述的三维影像动态矫正评估与矫具辅助设计方法,其中该矫具辅助设计包括依据矫正前后三维体型的变形模型,计算该矫具施加的压力使能产生预定中的侧弯角度减少、施力点的方向、垫片的面积大小及各椎体的受力应力分布。10.如权利要求2所述的三维影像动态矫正评估与矫具辅助设计方法,其中该矫正后三维脊椎曲线为多张不同阶段的矫正后三维脊椎曲线。11.一种三维影像动态矫正评估与矫具辅助设计系统,包括:三维扫描装置,用以取得人体的三维扫描信息;运算单元,用以取得该人体的多个二维影像进行辨识,计算该些二维影像像素数值,并合成原始三维脊椎曲线,该运算单元用以合成该些人体的二维影像与该三维扫描信息;影像变形预测矫正体型单元,用以产生该人体的变形后体型;以及脊椎材料特性与力学模型预估单元,根据该变形后体型预测矫具对该人体的施力位置、施力方向及施力大小的参数值。12.如权利要求11所述的三维影像动态矫正评估与矫具辅助设计系统,其中该影像变形预测矫正体型单元包括:第一部分,用以将该人体的该些二维影像叠合生成该原始三维脊椎曲线以及矫正后三维脊椎曲线,并将该原始三维脊椎曲线以及该矫正后三维脊椎曲线叠合该人体的外型影像;第二部分,用以将叠合后的人体外型影像的多个三角网格的端点各自连结到该原始三维脊椎曲线上最近的点,各自计算该些三角网格上的端点的弹性位能;当该原始三维脊椎曲线逼近该矫正后三维脊椎曲线时,该第二部分计算该些三角网格上的端点的弹性位能,使该弹性位能达最小值,以产生该些端点的位移量;以及第三部分,依据身体外型参数,以迭代运算计算该些三角网格上的端点的弹性位能使整体弹性位能达最小值,得到新三角网格并根据各自端点的位移量产生该变形后体型。13.如权利要求11所述的三维影像动态矫正评估与矫具辅助设计系统,其中该影像变形预测矫正体型单元包括:第一部分,用以将该人体的该些二维影像叠合生成该原始三维脊椎曲线以及矫正后三维脊椎曲线,并将该原始三维脊椎曲线以及该矫正后三维脊椎曲线叠合该人体的外型影像;
第二部分,用以在该人体内部建立多个中继点,将身体外型的复数三角网格的端点各自连接到最近的中继点,并将该些中继点各自连接到该原始三维脊椎曲线上最近的点;第三部分,用以各自计算该些三角网格上的端点及该些中继点的弹性位能,当该原始三维脊椎曲线逼近该矫正后三维脊椎曲线时,该第三部分计算该些三角网格上的端点及该些中继点的弹性位能,使该弹性位能达最小值,以产生该些端点的位移量及旋转量;以及第四部分,依据身体外型参数,迭代运算计算该些三角网格上的端点及该些中继点的弹性位能使整体弹性位能达最小值,得到新三角网格并根据各自端点的位移量产生该变形后体型。14.如权利要求11所述的三维影像动态矫正评估与矫具辅助设计系统,其中该脊椎材料特性与力学模型预估单元包括:第一部分,以该人体吊单杠受自重力作用下,取得该人体的该些二维影像,该人体的各脊体与椎间盘受到自重力作用后所产生的位移作为目标函数,进行最佳化回归分析以评估脊体与椎间盘的刚度;以及第二部分,以脊椎拉直时施力状态的迭代计算可得到该人体每节椎体与椎间盘元素节点的位移,对该些节点的位移与该目标函数的位移进行误差分析,使该些节点的位移均方根值达到最小值,获得该施力位置、该施力方向及该施力大小的参数值。15.如权利要求14所述的三维影像动态矫正评估与矫具辅助设计系统,其中该最佳化回归分析包括通过杨氏系数的迭代计算得到每节椎体与椎间盘元素节点的位移,该杨氏系数迭代收敛确认条件为该些节点的位移均方根值达到最小值。16.如权利要求14所述的三维影像动态矫正评估与矫具辅助设计系统,其中该脊椎材料特性与力学模型预估单元以有限元素法分析该人体脊椎的生物力学模型,利用具有该人体的冠状面、矢状面的该些二维影像将三维模型降阶为两个冠状面与矢状面二维等效有限元素模型。
技术总结
一种三维影像动态矫正评估与矫具辅助设计方法,包括下列步骤:取得人体的三维扫描信息取得该人体的多个二维影像进行辨识,计算该些二维影像像素数值,并合成原始三维脊椎曲线。合成该些人体的二维影像与该三维扫描信息。以影像变形预测矫正体型方法产生该人体的变形后体型。以脊椎材料特性与力学模型预估方法根据变形后体型预测矫具对该人体的施力位置、施力方向及施力大小的参数值。施力方向及施力大小的参数值。施力方向及施力大小的参数值。
技术研发人员:颜伯甫 黄钟仪 林尚一 于天立 吴宗明 蔡宗汶
受保护的技术使用者:财团法人工业技术研究院
技术研发日:2020.12.16
技术公布日:2022/6/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。