1.本发明属于海洋生态管理技术领域,具体地,涉及一种用于海洋牧 场建设的全水域智能水检管理方法。
背景技术:
2.海洋牧场的建设主要取决于自然状态下海洋生物赖以生存的海洋环 境,而人类对海洋自然环境的保护需要科学的海洋环保监管、以及准确及 时地对入海流水资源监测与优化,以确保近海养殖产业发展,也是海洋牧 场战略规划建设的可靠保障。
3.为海洋生物能够在海洋正常生存、栖息和繁殖,对海洋环境环保监管 应从如下三个方面解决对海洋生物生存环境的破坏:1)自然灾害对海洋局 部环境的破坏。海生物的大量死亡对局部环境的破坏;地震海啸对局部环 境的破坏。2)人类用大量垃圾填海造陆所造成的水质污染、人们生活垃圾 的随意丢弃飘、流至入海的江河湖泊水流或海域,造成对水质的污染;人 们在海洋运输、捕捞过程中产生的生活垃圾、油污、破碎网具等丢弃到水 域,这些垃圾会随时间推移大量堆积,造成对海洋局部水质的破坏,对海 生物的生存造成了严重的危害。3)由于居民生活和工业废水、以及农业生 产用药、施肥等污染源的源头管理缺失,污染物渗入地下、流入沟渠、江、 河,污水最终汇聚到大海。当前,黄河流域的下游地区,水质污染严重、 饮用水有害物质含量超标并有增加的趋势,致使人民群众的饮水安全受到 影响,身体健康受到威胁。在部分地区和流域,水污染已经呈现出从支流 向干流延伸、从城市向农村蔓延、从陆地向海洋发展的趋势。
4.然而,当前,在环保建设信息获取上,大多采用的是对水质、气体进 行人工取样检验和问题发生时的人力举报方式获取。这种信息获取方式不 可能在第一时间和地点获取源头信息;处理过程又会造成时间上的延迟; 还会受控于人们的思想意志。
5.
技术实现要素:
6.为确保我国海洋牧场建设的长久发展,使海洋生物在自然环境下安全 生长与繁殖,本发明提供了一种用于海洋牧场建设的全水域智能水检管 理方法,从海上、海岸线、入海水流域沿岸及源头建立水质监测和漂浮物 治理自动感知预警网络,通过多元异构网络传输进行宏观布控,从根本上 解决地域和部门条块分割所形成的责任推诿或责任不清对水资源环境治理 的影响,以保证海洋牧场建设健康发展。
7.本发明提供的用于海洋牧场建设的全水域智能水检管理方法,包 括:
8.检测全水域水质监测点的水质、空气监测点的空气质量和漂浮物监 测点的漂浮物的量;
9.采集、分析检测信息,并将分析结果发送给一级监管单位;
10.当所述分析结果超出设定标准时,生成警报信息,并将所述警报信 息发送给二级监管单位和/或三级监管单位;
11.接收所述一级监管单位、所述二级监管单位或所述三级监管单位的 处理意见。
12.在本发明的一些实施例中,检测全水域水质监测点的水质、空气监 测点的空气质量和漂浮物监测点的漂浮物的量包括:
13.检测入海流水域的水质和空气质量;
14.检测支流水域的水质及漂浮物的量;
15.检测主干流域的水质及漂浮物的量;
16.检测海洋水域的水质及漂浮物的量。
17.在本发明的一些实施例中,检测水源流域的水质和空气质量包括:
18.采用检测装置和/或生物生长监测法检测入海流水域的水质。
19.在本发明的一些实施例中,检测支流水域的水质及漂浮物的量包 括:
20.分别检测所述支流水域两侧水流、横向截面水流及所述支流水域与 所述主干流域的交汇处的水流的水质;以及
21.检测所述支流水域与所述主干流域的交汇处的漂浮物的量。
22.在本发明的一些实施例中,检测主干流域的水质及漂浮物的量包 括:
23.分别检测所述主干流水域两侧水流、横向截面水流及所述主干流域 与所述海洋水域的交汇处的水流的水质;以及
24.检测所述主干流域与所述海洋水域的交汇处的漂浮物的量。
25.在本发明的一些实施例中,检测海洋水域的水质及漂浮物的量包 括:
26.分别检测海洋沿岸水域、离岸水域、远海水域的水质;以及
27.分别检测所述沿岸水域、所述离岸水域、所述远海水域的漂浮物的 量。
28.在本发明的一些实施例中,上述方法还包括:
29.检测污染源发生地的空气质量及排出废水的水质。
30.在本发明的一些实施例中,上述方法还包括:
31.根据所述处理意见对污染进行治理。
32.在本发明的一些实施例中,根据所述处理意见对污染进行治理包 括:
33.当所述水质超出所述设定标准时,确定污染的水质监测点,并对污 染的水域进行治理;
34.当所述空气超出所述设置标准时,确定污染的空气监测点,并对排 放污染空气的企业进行监控;
35.当所述漂浮物的量超出所述设定标准时,确定污染的漂浮物监测 点,拦截和/或打捞所述漂浮物。
36.本方法能够在第一时间获取报警信息,以解决信息获取上的延迟问 题,能够从根本上解决地域和部门条块分割所形成的责任推诿或责任不 清对水资源环境治理的影响,保证海洋牧场建设健康发展。
37.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下 面的描述中变得明显,或通过本发明的实践了解到。
附图说明
38.图1为本发明实施例中的一种全水域智能水检管理方法的示意图。
39.图2为本发明实施例中的一种具体检测方法的示意图。
40.图3为本发明实施例中的一种支流水域监控单元的各子单元的分布 示意图。
41.图4为本发明实施例中的另一支流水域监控单元的各子单元的分布 示意图。
42.图5为本发明实施例中的一种主干流域监控单元的各子单元的分布 示意图。
43.图6为本发明实施例中的另一主干流域监控单元的各子单元的分布 示意图。
44.图7为本发明实施例中的一种海洋水域监控单元的各子单元的分布 示意图。
45.图8为本发明实施例中的漂浮物拦截方式示意图。
46.图9为本发明实施例中的一种污染源监控单元的各子单元的分布示 意图。
具体实施方式
47.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案 进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例, 而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在 没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保 护的范围。
48.本技术的说明书和权利要求书及所述附图中的术语“第一”、“第 二”、“第三”和“第四”等是用于区别不同对象,而不是用于描述特定顺 序。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排 他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或 设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步 骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其 它步骤或单元。
49.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构 或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置 出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的 独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本 文所描述的实施例可以与其它实施例相结合。
50.当前,国家提出海洋牧场建设,指出要用新科技、新方法对海洋牧 场进行智能化管理,所以首先要解决水质污染的问题。对水质的监测要 从根源上解决,才能实现对海洋水质的有效管控。当前所有的江河湖泊 汇集大海的水流像棵棵大树的树叶、树枝、树干与树根的关系,树叶为 源头,条条树枝汇聚于树干的各部位,最终由树干汇聚于根部进入土壤。 对海洋牧场建设的水质管理,应从国家顶层设计建立宏观管控机制,用 技术手段从源头抓起、介入支流、主流和海洋监测的各个环节,将水质 监测以区块链连接形式自动监测分发预报,建立多渠道授权信息获取、 分头治理与整体联动的管控机制。该管理技术方案的实施可节省海量的 政府人财物费用支出,能从根本上解决检测数据申报滞后、申报数据不 透明因技术和人为因素所造成的障碍。建立国家层面的顶层整体水检规 划设计,使中央管控与各地的具体实施联通,既有区块区域自治管理、 相对独立,又有预警网络联通,形成集权与分权管理上下一条龙的全国 性水质自动检测动态管控架构。
51.海洋牧场建设的环保治理涉及海洋自身环保建设和陆域入海流水 质保证,两者的融合既像大树扎根入沙土,又像平铺嵌入陆域的“木本 藤蔓”条条水流蜿蜒流转,最终汇入大海。对海洋牧场的建设,不但要 创造有利于海生物自然栖息的生存环境、创建科学的养殖方式方法,更 要建立全水域完整的水质保证监测预警体系,才能保证海生物的自然生 长。
52.海洋牧场建设全水域完整的水质保证监测预警管理,已在陈述中将 之比喻为大树或“木本藤蔓”,为防止空气和水质污染,政府相关部门如: 环保、自然资源、水利、农业、林业、城管等政府管理部门、应充分利 用网络自动预警系统联动,溯源治理、过程监测、自动多层分发、分级 监管,是解决有害气体、粉尘,液体、固体废物等污染物对空气、环境 污染,是保证水质安全的重要手段。
53.本发明是利用感知自动预警技术建立国家水质安全网络监管方法 和系统建设。在该系统建设过程中又分多个分系统,分系统又分多个子 系统,通过多种感知传感手段,对江河湖泊所有的入海流水质进行实时 动态监管,一旦污染超标将立即自动告警。同理,在解决了江河湖泊入 海流的水质监测后,沿海的海岸线实行定点水质监控,实现自动预警。
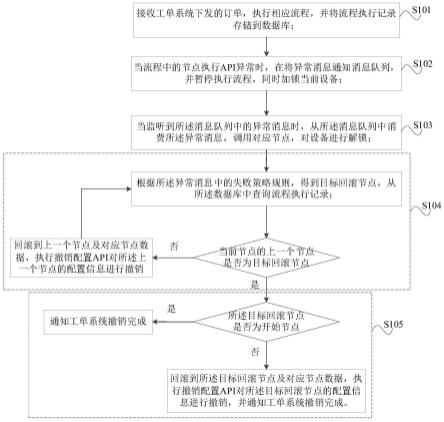
54.图1所示为本发明提供的一种用于海洋牧场建设的全水域智能水检 管理方法,其包括步骤s100-s400:
55.s100:检测全水域水质监测点的水质、空气监测点的空气质量和漂浮 物监测点的漂浮物的量。
56.可选地,如图2所示,可分别检测入海流水域的水质和空气质量(s110), 检测支流水域的水质及漂浮物的量(s120),检测主干流域的水质及漂浮 物的量(s130),及检测海洋水域的水质及漂浮物的量(s140)。
57.s110:检测入海流水域的水质和空气质量。
58.具体地,可采用检测装置和/或生物生长监测法检测入海流水域的水质。
59.在有污染的设施周围的水井、池塘、沟渠等水域设立空气或水质检测 自动预警装置,检测内容应在国家标准、地方标准或行业标准的框架下有 针对性实施。
60.一氧化碳、二氧化硫、二氧化氮、臭氧等会对水质产生影响,这些空 气质量参数能一定程度反映水质,故而本发明的全水域智能水检管理方法 里不仅对染源发生地的水源流域的水质进行了检测,还检测了该流域的空 气质量。
61.水质污染监测内容包括:水中氮、磷营养盐类、镉、铅、铬、汞、锰、 铁等微量元素、漂浮物质、悬浮物质、ph值、溶解氧和生化需氧量、总大 肠菌群、挥发性酚、丙烯腈、丙烯醛、油类、各种农药等。当空气或水质 超过设定数值时触发告警装置自动报警,报警数据会根据设定多渠道远程 发送数据。
62.除采用技术手段检测水质是否达标外,污染源附近水域(水井、池塘、 沟渠等)内鱼、虾、蟾、蛙等生物是否正常生长繁殖,生物生长监测是衡 量进入入海流水域水质是否达标最易判断的水质达标验证办法。
63.本技术中以下所述的纵向是指沿水流流向。横向是指,与水流成直角 的横向方向。
64.s120:自动检测支流水域的水质及漂浮物的量。
65.具体地,s120步骤可包括:分别自动检测支流水域两侧水流、横向截 面水流及支流水域与主干流域的交汇处的水流的水质;以及检测支流水域 与主干流域的交汇处的漂浮物的量。
66.在支流水域的两侧,根据需要沿水流方向有针对性的建立相应数量的 纵向水质自动感知预警监测点;在支流水域横向位置,根据需要建立相应 数量的横向水质监测自动
感知预警截面监测点;在支流水域进入主干水流 的交汇处建立相应数量的横向水质检测自动感知预警截面监测点。以上各 监测点的检测内容:根据国家相关法律规定、按相关检测标准执行监测。 通过反复确认支流水域水质,准确掌握支流水域水质入主干水域情况,以 便于管控。可在接近于主干流域设立固定或移动漂浮物检测自动感知预警 拦截装置,防止漂浮物的漂流蔓延造成大面积覆盖和污染,防止漂浮物进 入主干流域。
67.本技术中所述的纵向两侧,根据需要沿水流建立相应数量的监测点。
68.在水流的横向位置,根据需要建立相应数量的截面监测点。
69.本技术中所述的监测点还可采用浮标监测,即设立水环境在线监测 浮标站。对漂浮物的监测可以采用光学遥感图像,获取水上漂浮物数量 和位置信息,提高管理的准确性。
70.s130:检测主干流域的水质及漂浮物的量。
71.具体地,可包括:分别检测主干流水域两侧水流、横向截面水流及主 干流域与海洋水域的交汇处的水流的水质;以及检测主干流域与海洋水域 交汇处漂浮物的量。
72.在主干流域的两侧根据需要建立相应数量的竖向水质检测自动感知预 警监测点;在主干流域横向水流的位置,根据需要建立相应数量的横向水 质检测自动感知预警监测点;在主干水流进入大海的交汇处建立相应数量 的横向水质检测自动感知预警监测点,最终确认入海水质质量情况。可根 据需要在指定位置设立固定或移动漂浮物检测自动感知预警拦截装置,防 止漂浮物漂流蔓延造成大面积覆盖和污染,防止漂浮物进入海洋。
73.s140:检测海洋水域的水质及漂浮物的量。
74.可选地,s140步骤包括:分别检测海洋沿岸水域、离岸水域、远海水 域的水质;以及分别检测沿岸水域、离岸水域、远海水域的漂浮物的量。
75.在海洋沿岸水域、离岸、远海海域有针对性的建立水环境自动监测 装置,使海洋牧场建设的科学性、安全性得到落实。根据《国际海洋法》、 我国的《环境保护法》、《水污染防治法》和《海洋环境保护法》、《渔 业法》规定,防止和控制海洋牧场水域水质污染,保证鱼、虾、贝、藻 类正常生产、繁殖和水产品的质量。在海洋沿岸,设立海水监测自动预 警点,根据海洋牧场建设水质要求对水中氮、磷营养盐类、重金属等微 量元素、漂浮物质、悬浮物质等有针对性进行监测,保证海洋生物正常 生长繁殖、健康发展。
76.本技术中,对水上漂浮物、填海造地、填江河造陆所形成的漂浮物; 自然灾害、风吹雨打所形成的水上白色漂浮物及其他漂浮物;水上交运 输或陆域事故所造成的水上油类污染物;大量水生物死亡漂浮物;各种 水生藻类漂浮物等,采用水色遥感信息,通过卫星数据传输,采用便携 式海上拦截方式,对漂浮物进行有针对性打捞与拦截,把漂浮物消灭在 萌芽状态,通过“外科手术式”防止普遍发生,特别是填海造地等污染源。 又通过空中视频监控——使用飞行器巡航视频和检测,将信息及时自动 发送到监控中心,以便于管理者及时采取清理措施,防止大量漂浮物长 期滞留于海上破坏海洋生态。
77.本技术中海洋数据包括:海洋遥感、海洋地质、深海监测、物理海洋、 海洋生态、海洋化学和海洋气候等。采集手段可包括声、光、电磁、重力、 拉力等多物理场。对海洋油污监测可采用传统海洋油污染监测方法,例如 重量法、浊度法、光反射法、紫外分光光度法、红外光度法等。水质分析 可采用化合物传感器(内置仪器中),对水中氮、磷营养盐类、重金属等 微量元素以及有机化合物等进行检测。还可对水流进行辐射性污染检测, 采用辐射传
感器进行放射性污染强度获取,计算放射性污染强度梯度。
78.进一步地,上述方法还可包括:检测污染源发生地的空气质量及排出 废水的水质。
79.污染物发生地为例如有污染的设施、企业、园区等一线污染源发生 地。对入海流水域污染源头的采矿、冶炼、化工产品制造所排放的废水废 气,固体废物处置、固体废物堆放等危害生物生存环境的工业废水、生活 污水,应严格按照环保要求建立净化设施,凡是不达标的水质不能外流、 即不能开工生产;有害废弃物储存设施应符合环保密闭管理和存量要求, 凡是达不到要求的不能许可存放。
80.s200:采集、分析检测信息,并将分析结果发送给一级监管单位。
81.具体地,可以是,监测点自动数据采集实时发送至管理平台、管理平 台经统计、分析、运算后,并将分析结果发送给被授权的一级监管单位。
82.本技术所述的被授权的一级监控单位包括:业务垂直主管单位和属地 管理的环保部门。可选地,也可根据授权同时向多个一级监管部门进行 发送。比如,按照规定,需要同时向县级、地级和省级环保部门汇报时, 同时向县级、地级和省级环保部门信息发送。
83.s300:当分析结果超出设定标准时,生成警报信息,并将警报信息发 送给二级监管单位和/或三级监管单位。
84.具体地,可以是,监测点的感知传感器具备检测自动报警识别功能, 当超过设定数值时,传感器会按授权设定自动向被授权单位发送超过设定 数值数据,可将警报信息直接发送至二级监管单位和/或三级监管单位。
85.一般来说,业务管理是自上而下的分层管理,实施是双向自动接收与 回复通信方式,但是,遇到污染灾情严重的申报,可启动信息越级发送 功能,以解决时间上的延迟使损失扩大化的问题。
86.本技术的二级监管单位、三级监管单位可指分别管理一级监管单位和 二级监管单位的上级监管单位。例如,按照要求,监控结果只需要向县级 环保部门发送时,二级监管单位可为市级环保部门,此时三级监管单位可 为省级环保部门和环保部。若一级监管单位为省级环保部门,二级监管部 门即为环保部,此时就没有三级监管部门了。
87.此外,本技术的二级监管单位、三级监管单位可指行业垂直分管、地 方政府分管和环保等部门。也就是说,当有警报信息时,可将事故发生 的初期情况通过预警及时反馈至监管部门,并向行业垂直分管、地方政 府分管和环保三个渠道的信息发送,建立跨部门、跨区域、多渠道的信 息发送获取机制。这样的设置方式可减少人为因素的干预,解决扯皮、 推诿和责任不清问题,缩短溯源过程的时间,更为重要的是节省了大量 的监测人员费用,并及时避免大面积污染扩散事故的发生。
88.s400:接收一级监管单位、二级监管单位或三级监管单位的处理意见。
89.监管部门接受到警报信息后,会制定解决方案。例如,当污染特别严 重时,国家部委间、部与部之间开展国家最高管理层面研究解决方案。
90.可选地,该方法还可包括:根据处理意见对污染进行治理。
91.可选地,当水质超出设定标准时,确定污染的水质监测点,并对污染 的水域进行治理。
92.当空气超出设置标准时,确定污染的空气监测点,并对排放污染空气 的企业进行
监控。
93.当漂浮物的量超出设定标准时,网纲拉力器告警、监控视频越位告警 或水色遥感测绘数据预警,确定污染的漂浮物监测点,拦截和/或打捞漂浮 物。
94.本技术的方法形成了全过程信息自动闭环管理,该管理闭环方式的 实施,将解决分层管理上偶遇突发事件,技术人员、管理人员的叠加研 究与回报所耽搁得的时间;消除人为因素造成的推诿、扯皮、少报、瞒 报的事情发生。
95.该方式突出了环境保护超标信息跨部门、跨行业、跨级别的信息分 享,构建了以环保为主体,国家相关部委与地方政府的连动机制,对于 国家防止环境污染、保障水质安全具有重要意义。两大问题的解决:污 染源头治理的自动感知预警和管理源头的主体明确齐抓共管,海洋牧场 建设将会得以迅速发展。
96.进一步地,本发明提供的一种全水域智能水检管理平台,其中包括 检测装置、报警装置和非瞬时性计算机存储介质。
97.其中,检测装置用于分别检测全水域水质监测点的水质、空气监测点 的空气质量和漂浮物监测点的漂浮物的量。非瞬时性计算机存储介质,存 储有计算机程序,当计算机程序被一个或多个处理器执行时,使得处理 器执行以下操作:接受动态数据采集信息、经统计、分析、运算后,将 分析结果发送给被授权一级监管单位;当分析结果超出设定标准时,生 成警报信息,并将警报信息发送给二级监管单位和/或三级监管单位; 接收一级监管单位、二级监管单位或三级监管单位的处理意见。
98.进一步地,该管理平台还可包括拦截装置和/或打捞装置。其中拦截 装置用于拦截支流水域、主干流域和/或海洋水域的漂浮物。打捞装置用于 打捞支流水域、主干流域和/或海洋水域的漂浮物。
99.具体地,检测装置可包括:入海流水域检测单元、支流水域检测单元、 主干流域检测单元、海洋水域水检单元。
100.入海流水域检测单元用于检测入海流水域(即,污染源发生地水源) 的水质。入海流水域检测单元可包括第一水质检测子单元,第一水质检测 单元用于检测污染源发生地水源的水质。
101.进一步地,支流水域检测单元用于检测支流水域的纵向、即水流两侧 的水质及漂浮物的量。支流水域检测单元可包括第二水质检测子单元、第 三水质检测子单元、第四水质检测子单元和第一漂浮物检测子单元。
102.其中,第二水质检测子单元用于监测支流水域纵向、即水流两侧的水 质;第三水质检测子单元用于监测支流水域横向位置的水质;第四水质检 测子单元,用于监测支流水域与主干流域交汇处的水流水质。第一漂浮物 检测子单元,用于检测支流水域与主干流域的交汇处的漂浮物的量。
103.图3示出了本发明一实施例中支流水域的各子单元的具体排布方式。 其中,第二水质检测子单元31沿支流水域纵向两侧排布,监测支流水域纵 向(即,水流方向)两侧的水质。第三水质检测子单元32沿支流水域横向 排布,监测支流水域横向位置(即,垂直于水流方向的方向)的水质。第 一漂浮物拦截子单元33位于支流水域于主干流域的交汇处,垂直于水流方 向设置,用于拦截支流水域中的漂浮物,防止漂浮物的漂流蔓延造成大面 积覆盖和污染,并防止漂浮物进入主干流域。第四水质检测子单元34也位 于支流水域与主干流
域的交汇处,在第二漂浮物拦截子单元33的后方,靠 近主干流域处,用于监测支流水域与主干流域交汇处的水流水质。本实施 例中,第一漂浮物检测子单元(图中未示出)为飞行器,即采用飞行器巡 航视频和检测。本实施例未设置打捞装置,本发明的其他实施例可设置打 捞装置。
104.图4示出了本发明另一实施例中支流水域的各子单元的具体排布方式。 沟渠的水进入支流水域后,在支流水域的两侧根据需要设置自动预警检测 点、横向自动预警检测点,防止源头渗漏水漏检。在支流水域根据需要设 置漂浮物拦截装置,特别应在接近于主干流域位置设立漂浮物拦截网体, 预防漂浮物进入主干流域。
105.主干流域检测单元用于检测主干流域的水质及漂浮物的量。主干流域 检测单元可包括第五水质检测子单元、第六水质检测子单元、第七水质检 测子单元和第二漂浮物检测子单元。
106.其中,第五水质检测子单元,用于监测主干流域的两侧水流的水质; 第六水质检测子单元,用于监测主干流域的横向水流的水质;第七水质检 测子单元,用于监测主干流域与海洋交汇处水流的水质。第三漂浮物拦截 子单元,用于检测主干流域与海洋水域的交汇处的漂浮物的量。
107.图5示出了本发明一实施例中主干流域检测单元的各子单元的排布方 式。其中,第五水质检测子单元51位于主干流域纵向两侧,用于监测主干 流域的两侧水流的水质。第六水质检测子单元52沿主干流域横向排布,用 于监测主干流域横向位置的水质。第七水质检测子单元53位于主干流域与 海洋水域的交汇处,在第二漂浮物拦截子单元54的后方,靠近海洋处,用 于监测主干流域与海洋交汇处水流的水质。第二漂浮物拦截子单元54位于 主干流域与海洋水域的交汇处,用于拦截主干流域中的漂浮物,防止漂浮 物的漂流蔓延造成大面积覆盖和污染,并防止漂浮物进入海洋水域。本实 施例中,第二漂浮物检测子单元(图中未示出)为飞行器,即采用飞行器 巡航视频和检测。本实施例未设置打捞装置,本发明的其他实施例可设置 打捞装置。
108.图6示出了本发明另一实施例中主干流域的各子单元的排布方式。当 支流水流进主干水域之前建立横向自动检测预警点,在主流水域两侧根据 需要建立n个自动检测预警点。在临近入海口水域,设立覆盖横向水面的 n个自动水检监测点。
109.海洋水域检测单元用于检测海洋水域的水质及漂浮物的量。海洋水域 检测单元可包括沿岸水域检测子单元、离岸水域检测子单元、远海水域检 测子单元和海洋漂浮物检测子单元。其中,沿岸水域检测子单元用于检测 海洋沿岸水域的水质。离岸水域检测子单元用于检测深海水域的水质。远 海水域检测子单元用于检测远海水域的水质。海洋漂浮物检测子单元用于 检测沿岸水域、深海水域、远海水域的漂浮物的量。
110.可选地,在海洋水域还可设置第四漂浮物拦截子单元和/或第一漂浮物 打捞子单元。其中,第四漂浮物拦截子单元用于拦截沿岸水域、离岸水域、 远海水域的漂浮物。第一漂浮物打捞子单元用于打捞沿岸水域、离岸水域、 远海水域的漂浮物。
111.可选地,海洋水域检测单元还包括电池子单元。电池子单元采用风力 发电、海浪浮动发电、太阳能发电为离岸和远海水域检测子单元供电,以 便于通过卫星或其它无线通信方式发送、接收信息。
112.图7示出了本发明一实施例中,海洋流域的各子单元的设置方式。 近岸和滩涂养
殖,对绿藻及垃圾的有效拦截,对填海造路垃圾的有效拦截, 漂浮物的固定拦截和移动拦截。有针对性分布对海水各种有机无机成分检 测设立自动预警检测点。
113.水上漂浮物拦截,是在不影响水上交通的情况下,根据需要有针对 性设置漂浮物拦截阻拦屏障,拦截方式可根据水道、船只航行路线,采 用封闭式、错位式、移动围猎等方式拦截。特别应在临近入海口水域设 立多种方式的漂浮物拦截屏障,防止主干流水域漂浮物进入海域。图8 所示为本技术中的漂浮物拦截的可选方式,包括错位式拦截81、移动 围猎式拦截82和封闭式拦截83。
114.本发明建设搭建了管控中心、建立了融合共建平台。利用该平台统 合各检测子单元的检测数据,将每个监测点的自动检测数据通过无线传 输进入管控中心,该中心利用共建平台使海洋牧场建设的水源头环保治 理、支干水域、主干流域和海洋的近中远海的各种空气和水质监测进入 平台进行整体数据分析和大数据处理;对水上漂浮物的漂移数据,由于 河流限于宽度,在支干水域、主干流域漂浮物拦截装置两测或一侧的拦 截网纲上加装拉力传感器,当大量拦截物聚靠于网边时,网纲阻力增大, 当超过设定阈值时传感器报警;或在支干水域、主干流域漂浮物拦截装 置两测或一侧安装视频监控,划定漂浮物量级,越位则报警。海上的漂 浮物拦截实施涉及近岸、离岸、远海三大水域,近岸和有岛屿的离岸、 远海海域,可采用陆域视频监控预警,无岛屿的离岸、远海海域则要利 用水色遥感数据结合北斗卫星导航定位,用中心平台虚拟管理技术实现
ꢀ“
可视化”的应急指挥;此外,离岸、远海的海洋牧场建设可依靠海上风 电、太阳能,波浪发电方式对各检测点供电,通过微波或卫星传输。该 系统建设是通过技术上的交叉或叠加,实现对问题发生点的准确定位, 通过感知系统与系统集成实现事故处理前置。
115.该管控中心的特点是:一、不以人们的意志为转移的如实自动预报; 二、监测数据根据授权,多人员多层级同时接受(存在微弱延迟);三、 节省大量人力巡查费用;四、实现了国家跨部门环保治理的陆海一体化 联动;五、有利于与其他应急管理系统融合。为城市应急管理提供技术 支持。
116.本发明的检测装置还可包括污染源发生地检测单元,其用于检测污染 源发生地的空气质量及排出废水的水质。
117.是在有污染的设施内四周(东西南北)四个方向安装相应的空气检测 自动预警传感装置;在有污染的设施内、或园区低洼处钻浅水井,安装相 应水质检测自动预警装置。在有污染的设施内设立空气或水质监测的内容, 应在国家标准、地方标准或行业标准的框架下有针对性实施。空气污染监 测内容包括:对一氧化碳、二氧化硫、二氧化氮、臭氧、pm2.5、pm10 等。水质污染检测内容包括:水中氮、磷营养盐类、镉、铅、铬、汞、锰、 铁等微量元素、漂浮物质、悬浮物质、ph值、溶解氧和生化需氧量、总大 肠菌群、挥发性酚、丙烯腈、丙烯醛、油类、各种农药等。当空气或水质 超过设定阈值时,会触发告警装置自动预警,报警数据会根据设定多渠道 远程发送数据。
118.图9示出了本发明可选实施例中,污染源检测单元各子单元的(1)和 (2)两种排布方式。其中,空气检测自动预警传感装置81可安装在有污 染的设施内四周(东西南北)四个方向,水质检测自动预警装置82可安装 在有污染的设施内、或园区低洼处钻浅水井。
119.本技术以上所有监测点的感知数据可通过有线或无线传输,进入区 域子平台,通过物联、互联网络与n个分平台连接,由数据采集单元 采集后发至管理平台。
120.本技术利用新一代信息技术感知传感方式实现自动告警预报,实现 总体管控。实行方式是对所有污染源实行源头检测治理;大小江河均设 置横向与纵向水质监测自动通信网点,入流水质实施不间断动态监测, 能从根本上解决我国海洋牧场建设统合治理的技术难题,可实现整体布 局全覆盖监管。
121.若无特别说明,本技术中的处理器可以是任何适当的硬件处理器, 比如cpu、gpu、fpga、dsp和asic等等。若无特别说明,所 述存储单元可以是任何适当的磁存储介质或者磁光存储介质,比如,阻 变式存储器rram(resistive random access memory)、动态随机存 取存储器dram(dynamic random access memory)、静态随机存取 存储器sram(static random-access memory)、增强动态随机存取 存储器edram(enhanced dynamic random access memory)、高 带宽内存hbm(high-bandwidth memory)、混合存储立方hmc (hybrid memory cube)等等。
122.本技术的技术方案部分可以以软件产品的形式体现出来,该计算机 软件产品存储在一个存储器中,包括若干指令用以使得一台计算机设备 (可为个人计算机、服务器或者网络设备等)执行本技术各个实施例所 述方法的全部或部分步骤。而前述的存储器包括:u盘、只读存储器 (rom,read-only memory)、随机存取存储器(ram,randomaccess memory)、移动硬盘、磁碟或者光盘等各种可以存储程序代码 的介质。
123.显然,上述实施例仅仅是为清楚地说明本发明所作的举例,而并非 对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的 基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有 的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于 本发明的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。