技术特征:
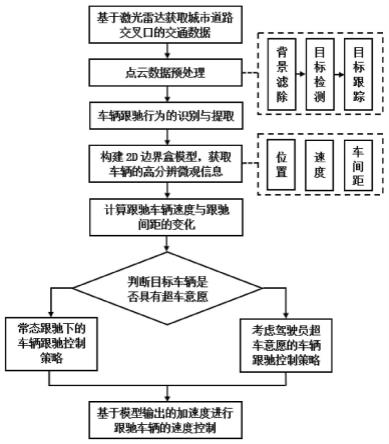
1.一种车辆跟驰控制方法,其特征在于,所述方法包括步骤:s1:采集并处理道路交叉口交通数据,识别并提取车辆跟驰行为;s2:构建车辆2d边界盒模型,获取高分辨微观交通信息,所述高分辨微观交通信息包括车辆的瞬时速度和跟驰间距;s3:根据所述高分辨率微观交通信息,分析同一车道上目标车辆与前导车辆的运行状态,同时分析车辆的瞬时速度及跟驰间距随时间变化的曲线,判断分析目标车辆驾驶员是否具有超车意愿;s4:针对不同驾驶员意愿,采用相应的车辆跟驰控制方法控制车辆运行。2.根据权利要求1所述的车辆跟驰控制方法,其特征在于,步骤s1包括:交通数据采集,点云数据背景滤除,交通目标检测,车辆运行轨迹提取,跟驰行为识别与提取。3.根据权利要求2所述的车辆跟驰控制方法,其特征在于,所述交通目标检测方法为dbscan聚类算法,首先根据激光雷达点云数据的特点和交通目标点云的空间排布规律,选定预设的聚类半径和最小聚类点个数,进行目标检测,然后根据坐标关系清除所有道路空间之外区域的交通目标,再根据不同交通目标的点云特征差异,从所有目标中识别提取出车辆目标,并记录每个车辆目标在道路空间中的位置。4.根据权利要求1所述的车辆跟驰控制方法,其特征在于,步骤s2所述的构建车辆2d边界盒模型方法包括:首先将车辆目标点云投影至xoy平面,然后对目标点云进行凸包点提取,最后根据最小面积法原理构建边界盒模型。5.根据权利要求1所述的车辆跟驰控制方法,其特征在于,步骤s2所述获取高分辨微观交通信息的方法为:通过边界盒模型估计车辆的尺寸,并确定出车头的位置;比较相邻帧中车辆的位置变化,计算得到车辆的瞬时速度;比较跟驰过程中前后两车的位置关系,计算得到跟驰间距。6.根据权利要求5所述的车辆跟驰控制方法,其特征在于,所述车辆的瞬时速度和跟驰间距的计算方法如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)其中为目标车辆的瞬时速度,和分别为车辆在时刻和
ꢀꢀ
时刻的车头位置坐标,和
分别为两车的车头间距与跟驰间距,和分别为前导车辆和跟驰车辆的车头位置坐标,为前导车辆的车长。7.根据权利要求1所述的车辆跟驰控制方法,其特征在于,步骤s3所述判断分析目标车辆驾驶员是否具有超车意愿的方法为:统计分析跟驰间距随车速变化的情况,若跟驰间距随着速度的增大而减小,则驾驶员具有超车意愿;若跟驰间距随着速度的增大而增大,则驾驶员不具超车意愿。8.根据权利要求7所述的车辆跟驰控制方法,其特征在于,所述针对不同驾驶员意愿,采用相应的车辆跟驰控制方法控制车辆运行,包括:若判断目标车辆驾驶员具有超车意愿,则采用考虑驾驶人超车意愿的跟驰模型对目标车辆进行速度控制,否则采用常态情况下的车辆跟驰控制策略。9.根据权利要求8所述的车辆跟驰控制方法,其特征在于,所述考虑驾驶人超车意愿的跟驰模型,具体包括:
ꢀꢀ
(4)其中是第n个跟驰车辆在时刻的加速度,是第n个跟驰车辆在时刻的速度,是第n个跟驰车辆与第n-1个车辆在 时刻的速度差,是两车在时刻的间隔距离; 为常态跟驰下的车辆跟驰控制方法的模型参数,为考虑驾驶员超车意愿的车辆跟驰控制方法的模型参数。10.根据权利要求8所述的车辆跟驰控制方法,其特征在于,考虑驾驶员超车意愿的车辆跟驰控制在通过模型控制的同时,另外引入两个距离参数:最小安全距离和变道距离 ;首先判断跟驰间距与的大小,若 >,则继续执行考虑驾驶员超车意愿的车辆跟驰控制策略;若<,接着判断左侧车道是否满足超车变道的条件;若满足条件,车辆执行变道超车的控制策略;若不满足条件,再判断跟驰间距与的大小;若 >,则继续执行考虑驾驶员超车意愿的车辆跟驰控制策略;若<,车辆放弃超车意愿,执行常态跟驰下的车辆跟驰控制
策略,直到满足> 后,再重新执行考虑驾驶员超车意愿的车辆跟驰控制策略。
技术总结
本发明公开了一种车辆跟驰控制方法和系统,在城市道路交叉口场景下考虑驾驶人超车意愿,用以改善车辆个性化驾驶风格对交叉口交通安全的影响。该方法包括以下步骤:1)采集城市道路交叉口的车辆行驶数据,识别并提取车辆跟驰行为;2)通过构建2D边界盒模型的方法,获取跟驰过程中的高分辨微观信息;3)分析同一车道上目标车辆与前导车辆的运行状态,速度及间距变化,判断目标车辆是否具有超车意愿;4)基于不同行驶状态下的跟驰模型,实时控制车辆加速度变化。本发明通过分析路测传感器获取的交通信息,进行车辆跟驰决策判断,避免交通事故,既提高了城市道路交叉口的通行效率,又保障了交叉口跟驰过程中车辆行驶的安全性。叉口跟驰过程中车辆行驶的安全性。叉口跟驰过程中车辆行驶的安全性。
技术研发人员:郑建颖 杨泽 郁树梅 孙荣川
受保护的技术使用者:苏州大学
技术研发日:2022.05.06
技术公布日:2022/6/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。