技术特征:
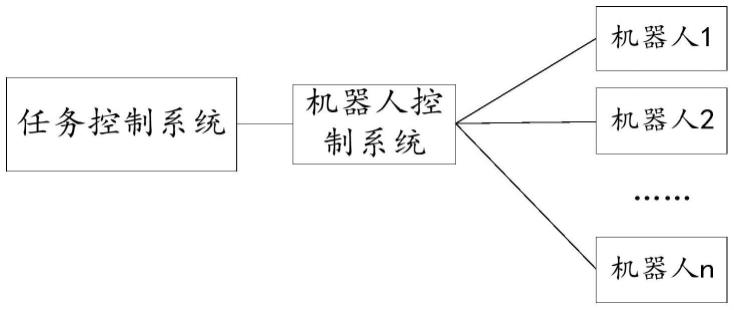
1.一种任务执行方法,其特征在于,应用于机器人,所述方法包括:按照由高到低的多个层级,对机器人控制系统下发的任务进行逐层级拆解,将每一层级的拆解结果存储到该层级对应的子任务列表中,其中,最低层级对应于所述机器人自身配备的硬件执行机构;在检测到针对所述任务的调度时,按照由高到低的所述多个层级,对每一层级的子任务列表进行逐层调度,直至控制所述机器人自身配备的硬件执行机构执行对应的动作,进而完成所述任务。2.根据权利要求1所述的方法,其特征在于,由高到低的多个层级为第1层级至第n层级;按照由高到低的多个层级,对机器人控制系统下发的任务进行逐层级拆解,将每一层级的拆解结果存储到该层级对应的子任务列表中,包括:将第1层级至第n层级逐个作为当前层级,对机器人控制系统下发的任务进行当前层级拆解,得到所述任务在当前层级的子任务群组;对所述任务在当前层级的任务参数和所述任务在上一层级的任务参数进行兼容处理,为所述任务在当前层级的子任务群组中各个子任务添加兼容处理后的任务参数;将所述任务在当前层级的携带任务参数的子任务群组存储到当前层级对应的子任务列表中。3.根据权利要求1所述的方法,其特征在于,所述方法还包括:采集所述机器人的周围环境信息和/或任务执行情况;根据所述机器人的周围环境信息和/或任务执行情况,对所述任务在当前层级的至少一个子任务添加属性参数。4.根据权利要求1-3任一所述的方法,其特征在于,由高到低的多个层级为第1层级至第n层级;在检测到针对所述任务的调度时,按照由高到低的所述多个层级,对每一层级的子任务列表进行逐层调度,直至控制所述机器人自身配备的硬件执行机构执行对应的动作,包括:将第1层级至第n-1层级逐个作为当前层级,从当前层级对应的子任务列表中,查询所述任务在当前层级的子任务群组包括的各个子任务各自的状态;在查询到所述任务在当前层级的子任务为可发送状态时,调度由当前层级的子任务拆解得到的下一层级的子任务群组,直至将第n-1层级作为当前层级时,调度所述任务在第n层级的至少一个子任务;根据所述任务在第n层级的至少一个子任务,控制所述机器人自身配备的硬件执行机构执行对应的动作。5.根据权利要求4所述的方法,其特征在于,在查询到所述任务在当前层级的子任务为可发送状态时,调度由当前层级的子任务拆解得到的下一层级子任务群组,包括:在查询到所述任务在当前层级的子任务为可发送状态时,检测所述子任务是否具有预先配置的属性参数;在所述子任务的属性参数为条件触发属性的情况下,当满足所述条件触发属性对应的触发条件时,调度由所述子任务拆解得到的下一层级的子任务群组;和/或在所述子任务的属性参数为延时属性的情况下,当延迟所述延时属性对应的时长时,调度由所述子任务拆解得到的下一层级的目标子任务群组;
所述方法还包括:在所述子任务的属性参数为中断属性的情况下,逐层级返回所述任务在当前层级中断的消息。6.根据权利要求4所述的方法,其特征在于,所述方法还包括:检测所述任务在当前层级的子任务群组中各个子任务分别是否已完成;当所述任务在当前层级的子任务群组中各个子任务均已完成时,向上一层返回所述任务在当前层级的子任务群组已完成,直至所述任务在第1层级的子任务群组已完成时,输出所述任务已完成的消息。7.一种机器人,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现权利要求1-6任一项所述的任务执行方法的步骤。8.根据权利要求7所述的机器人,其特征在于,所述机器人自身配备有以下至少一种硬件执行机构:定位机构、导航机构、顶升机构、辊筒机构、显示屏、人机交互组件。9.一种计算机可读存储介质,其上存储有计算机程序/指令,其特征在于,该计算机程序/指令被处理器执行时实现权利要求1-6任一项所述的任务执行方法。10.一种计算机程序产品,包括计算机程序/指令,其特征在于,该计算机程序/指令被处理器执行时实现权利要求1-6任一项所述的任务执行方法。
技术总结
本发明实施例提供了一种任务执行方法、机器人、存储介质及计算机程序产品,以灵活且高效的完成机器人任务的执行。本发明实施例可以对任意任务进行逐层拆解,适应于所有任务,可以对任意复杂的任务进行拆解。本发明实施例还可以对任意任务进行逐层级调度,各个层级相互独立,按照子任务层级秩序井然地完成调度过程,直至控制机器人自身配置的硬件执行机构,执行对应的动作,从而完成对应的任务。由此,本发明实施例所提供任务执行方法可以适应于任何机器人任务的调度设计,从而使得机器人可以灵活且高效的完成所有任务的执行。灵活且高效的完成所有任务的执行。灵活且高效的完成所有任务的执行。
技术研发人员:许爱功
受保护的技术使用者:北京旷视机器人技术有限公司
技术研发日:2022.02.10
技术公布日:2022/6/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。