1.本发明涉及通过能够收纳于车辆的输送体来输送货物的输送系统、输送方法以及记录介质。
背景技术:
2.在日本特开2018-205806中公开了一种如下所述的输送计划生成系统:在存在多个寄送方的情况下,假定可暂时设置且能够移动的移动仓库,以物品经由移动仓库被向寄送目的地配送的方式变更配送路线并以实现变更后的该配送路线的方式对于配送机构以及移动仓库生成移动的指示。
3.在日本特开2018-205806的输送计划生成系统中,存在难以将配送用的车辆的停车空间、起重机等卸货设备受到制约的场所设定为移动仓库的情况。特别是在成为移动仓库的车辆的抵达地,由于多个车辆集中,所以会产生货物的装卸时间的损失。卸货设备的增设不仅导致成本增加,而且为了将货物从车辆的抵达地运输至接纳场所需要重新装载至其他车辆来进行运输。
技术实现要素:
4.本发明的目的在于,提供在将货物从车辆的抵达地运输至接纳场所的情况下能够省去货物向其他车辆的重新装载作业的输送系统、输送方法以及记录介质。
5.技术方案1所记载的输送系统具备:输送体,能够移动并且被装载货物;车辆,收纳一个或者多个上述输送体;以及指示部,指示装载有上述货物的上述输送体的直至上述货物的接纳场所为止的移动,且当在上述接纳场所卸下了上述货物之后,指示装载有其他货物的上述输送体或者未装载货物的上述输送体的直至上述车辆为止的移动。
6.技术方案1所记载的输送系统具备输送体、车辆以及指示部。输送体构成为能够移动且能够收纳于车辆。在该输送系统中,指示部对于装载有货物的输送体指示从车辆的抵达地到该货物的接纳场所为止的移动。另外,当在接纳场所卸下了货物之后,指示部指示装载有其他货物的输送体或者未装载货物的输送体的直至车辆为止的移动。因此,根据该输送系统,在将货物从车辆的抵达地运输至接纳场所的情况下,能够省去货物向其他车辆的重新装载作业。
7.技术方案2所记载的输送系统是在技术方案1所记载的输送系统的基础上完成的,其中,上述输送体具备:环境传感器,收集上述输送体的周边的环境信息;驱动部,连接有行驶车轮;以及自主控制部,基于收集到的上述环境信息来控制上述驱动部而使上述输送体自主地行驶至上述接纳场所。
8.在技术方案2所记载的输送系统中,其特征在于输送体自主地行驶。因此,根据该输送系统,不需要用于使输送体移动的牵引车辆等。
9.技术方案3所记载的输送系统是在技术方案2所记载的输送系统的基础上完成的,其中,上述环境传感器收集对被装载于上述输送体的上述货物标注的识别标签作为识别信
息,上述自主控制部基于收集到的上述识别信息来使上述输送体行驶至标注有上述识别标签的上述货物的上述接纳场所。
10.在技术方案3所记载的输送系统中,自主控制部基于收集到的识别标签所涉及的识别信息来使输送体行驶至接纳场所。根据该输送系统,通过将接纳场所的信息与识别标签建立对应,由此即便在车辆内产生货物的重新装载等,也不需要重新指定接纳场所的处理。
11.技术方案4所记载的输送系统是在技术方案2或者3所记载的输送系统的基础上完成的,其中,上述输送体具备对所装载的上述货物的重量进行测定的测定部,上述自主控制部基于由上述测定部测定出的重量来使上述输送体行驶至多个上述接纳场所中的一个上述接纳场所。
12.根据技术方案4所记载的输送系统,在相同的货物的接纳场所存在多个的情况下,通过基于由测定部测定出的重量来选择接纳场所,能够实现从车辆的抵达地向目的地的输送的高效化。
13.技术方案5所记载的输送系统是在技术方案1~4中任一项所记载的输送系统的基础上完成的,其中,包括共通化的多个上述输送体。
14.根据技术方案5所记载的输送系统,通过使输送体共通化,即便不等待输送了货物的输送体的返回而将其他输送体收纳于车辆也不产生妨碍。因此,根据该输送系统,能够省去直到输送货物的输送体返回至车辆为止的待机时间,能够实现货物的输送的进一步的高效化。
15.技术方案6所记载的输送系统是在技术方案1~5中任一项所记载的输送系统的基础上完成的,其中,上述输送体具备用于驱动上述车辆的蓄电池,上述指示部指示上述蓄电池充电完毕的上述输送体的直至上述车辆为止的移动。
16.技术方案6所记载的输送系统被应用于通过蓄电池进行驱动的车辆。根据该输送系统,通过将搭载有预先充电完毕的蓄电池的输送体收纳于车辆,与车辆具备蓄电池的情况相比,能够减少伴随着充电的停车时间。
17.技术方案7所记载的输送方法是具备能够移动且被装载货物的输送体和收纳一个或者多个上述输送体的车辆的输送系统中的输送方法,其中,由计算机执行如下处理:指示装载有上述货物的上述输送体的直至上述货物的接纳场所为止的移动,且当在上述接纳场所卸下了上述货物之后,指示装载有其他货物的上述输送体或者未装载货物的上述输送体的直至上述车辆为止的移动。
18.技术方案7所记载的输送方法被应用在具备输送体以及车辆的输送系统中。在该输送方法中,计算机对于装载有货物的输送体指示从车辆的抵达地直至该货物的接纳场所为止的移动。另外。当在接纳场所卸下了货物之后,计算机指示装载有其他货物的输送体或者未装载货物的输送体的直至车辆为止的移动。因此,根据该输送方法,在将货物从车辆的抵达地运输至接纳场所的情况下,能够省去货物向其他车辆的重新装载作业。
19.技术方案8所记载的输送程序是在具备能够移动且被装载货物的输送体和收纳一个或者多个上述输送体的车辆的输送系统中执行的输送程序,其中,使计算机执行如下处理:指示装载有上述货物的上述输送体的直至上述货物的接纳场所为止的移动,且当在上述接纳场所卸下了上述货物之后,指示装载有其他货物的上述输送体或者未装载货物的上
述输送体的直至上述车辆为止的移动。
20.技术方案8所记载的输送程序中,由计算机在具备输送体以及车辆的输送系统中执行如下处理。即,计算机对于装载有货物的输送体指示从车辆的抵达地直至该货物的接纳场所为止的移动。另外,当在接纳场所卸下了货物之后,计算机指示装载有其他货物的输送体或者未装载货物的输送体的直至车辆为止的移动。因此,根据该输送程序,在将货物从车辆的抵达地运输至接纳场所的情况下,能够省去货物向其他车辆的重新装载作业。
21.根据本发明,在将货物从车辆的抵达地运输至接纳场所的情况下,能够省去货物向其他车辆的重新装载作业。
附图说明
22.以下,参照附图对本发明的示例性实施例的特征、优点、技术及工业重要性进行说明,在附图中相同的附图标记表示相同的构成要素,其中:
23.图1是表示第1实施方式所涉及的输送系统的简要结构的图。
24.图2是表示第1实施方式的车辆的硬件结构的框图。
25.图3是对第1实施方式的自走式托盘(self-propelled pallet)的构造进行说明的图。
26.图4是表示第1实施方式的自走式托盘的硬件结构的框图。
27.图5是表示第1实施方式的自走式托盘的功能结构的框图。
28.图6是表示第1实施方式的管理服务器的硬件结构的框图。
29.图7是表示第1实施方式的管理服务器中的状态db所存储的信息的例子的图。
30.图8a是表示在第1实施方式的管理服务器中执行的引导处理的流程的一个例子的流程图。
31.图8b是表示在第1实施方式的管理服务器中执行的引导处理的流程的一个例子的流程图(图8a的继续)。
具体实施方式
32.使用附图对本发明的输送系统进行说明。输送系统能够使用卡车等配送用的车辆以及可收纳于该车辆的输送体来配送货物。
33.[第1实施方式]
[0034]
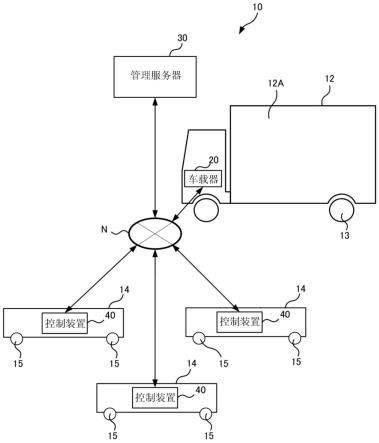
如图1所示,第1实施方式的输送系统10构成为包括车辆12、作为输送体的多个自走式托盘14、以及管理服务器30。在车辆12装载有车载器20。另外,在自走式托盘14分别装载有控制装置40。
[0035]
车载器20、多个控制装置40以及管理服务器30通过网络n相互连接。此外,车载器20或者控制装置40与管理服务器30的连接、以及车载器20与控制装置40的连接也可以通过不同的网络来进行。另外,在图1中,对于1个管理服务器30分别连接有1个车载器20以及3个控制装置40,但车载器20、控制装置40以及管理服务器30的连接数并不局限于此。
[0036]
(车辆)
[0037]
本实施方式的车辆12是由蓄电池驱动的电动汽车。如图2所示,本实施方式所涉及的车辆12构成为包括车载器20、监视器22、扬声器23以及gps装置24。另外,车辆12构成为包
括功率控制单元26、驱动单元28以及连接器29。
[0038]
车载器20构成为包括cpu(central processing unit)20a、rom(read only memory)20b、ram(random access memory)20c、无线通信i/f20e以及输入输出i/f20f。cpu20a、rom20b、ram20c、无线通信i/f20e以及输入输出i/f20f经由内部总线20g连接为相互能够通信。
[0039]
cpu20a是中央运算处理单元,执行各种程序、控制各部。即,cpu20a从rom20b读出程序并将ram20c作为工作区域来执行程序。
[0040]
rom20b存储有各种程序以及各种数据。在本实施方式的rom20b存储有用于控制车载器20的控制程序。
[0041]
ram20c作为工作区域来暂时储存程序或者数据。
[0042]
无线通信i/f20e是用于与控制装置40以及管理服务器30进行通信的无线通信模块。该无线通信模块例如可使用5g、lte、wi-fi(注册商标)等通信标准。无线通信i/f20e与网络n连接。
[0043]
输入输出i/f20f是用于与被装载于车辆12的监视器22、扬声器23以及gps装置24进行通信的接口。此外,监视器22、扬声器23以及gps装置24可以与内部总线20g直接连接。
[0044]
监视器22设置于车辆12的仪表盘、前围板等,是用于显示各种信息的液晶监视器。另外,本实施方式的监视器22具有触摸面板,例如可以通过车辆12的驾驶员的操作来输入自走式托盘14的移动目的地所涉及的信息。
[0045]
扬声器23设置于仪表盘、中心控制台、前柱、或者前围板等,是用于输出声音的装置。此外,扬声器23也可以与监视器22设置为一体。
[0046]
gps装置24是测定车辆12的当前位置的装置。gps装置24包括接收来自gps卫星的信号的未图示的天线。此外,gps装置24也可以经由未图示的汽车导航系统与车载器20连接。
[0047]
功率控制单元26是对后述的驱动单元28进行电控制的装置,至少包括升压转换器和逆变器。功率控制单元26经由连接器29从后述的车辆用蓄电池44b接受电力的供给。
[0048]
驱动单元28是驱动车辆12的驱动轮13的装置,至少包括行驶用马达和变速驱动桥(transaxle)。在从功率控制单元26接受到驱动用的电力的供给的情况下,驱动单元28驱动马达来使驱动轮13旋转。
[0049]
连接器29是用于与后述的车辆用蓄电池44b连接的端子。连接器29设置于车辆12的货箱12a的内部,被设置为能够与设置于自走式托盘14的连接器49b连接。
[0050]
(自走式托盘)
[0051]
在自走式托盘14中,控制装置40将托盘用蓄电池44a和车辆用蓄电池44b的充电容量、以及自走式托盘14的当前位置在规定的时机发送至管理服务器30。另外,若从管理服务器30接收到指示自走式托盘14的移动的指令,则控制装置40按照该指令使自走式托盘14移动。
[0052]
如图3所示,本实施方式所涉及的自走式托盘14构成为包括:长方体的主体部14a,高度小于宽度以及长度;装载部14b,在上表面装载货物p;以及作为行驶车轮的车轮15,被设置于下部。车轮15包括设置于主体部14a的各角部附近的车轮15a~15d。另外,如图4所示,自走式托盘14构成为包括控制装置40、外部传感器41、gps装置42以及载荷传感器43。另
外,自走式托盘14构成为包括托盘用蓄电池44a、车辆用蓄电池44b、控制单元46、马达48a~48d以及连接器49a、49b。
[0053]
控制装置40构成为包括cpu40a、rom40b、ram40c、无线通信i/f40e以及输入输出i/f40f。cpu40a、rom40b、ram40c、无线通信i/f40e以及输入输出i/f40f经由内部总线40g连接为相互能够通信。cpu40a、rom40b、ram40c、无线通信i/f40e以及输入输出i/f40f的构造与上述的车载器20的cpu20a、rom20b、ram20c、无线通信i/f20e以及输入输出i/f20f相同。
[0054]
其中,本实施方式的无线通信i/f40e与网络n连接,并经由网络n与车载器20以及管理服务器30连接(参照图1)。
[0055]
另外,在输入输出i/f40f连接有外部传感器41、gps装置42、载荷传感器43以及控制单元46。此外,外部传感器41、gps装置42、载荷传感器43以及控制单元46也可以与内部总线40g直接连接。
[0056]
作为环境传感器的外部传感器41是对自走式托盘14的周边的环境信息进行收集的传感器组。该外部传感器41至少包括拍摄自走式托盘14的周围的照相机41a。另外,外部传感器41包括:毫米波雷达41b,向规定范围发射探测波,并接收反射波;和光学雷达(laser imaging detection and ranging)41c,扫描规定范围。
[0057]
gps装置42是测定自走式托盘14的当前位置的装置。gps装置42包括接收来自gps卫星的信号的天线(省略图示)。
[0058]
作为测定部的载荷传感器43被设置于装载部14b的下部,是测定载置于装载部14b的货物p的重量的传感器。
[0059]
托盘用蓄电池44a是自走式托盘14的动力用的电池,被搭载于主体部14a的内部。托盘用蓄电池44a与控制单元46以及连接器49a电连接。
[0060]
车辆用蓄电池44b是车辆12的动力用的电池,被搭载于主体部14a的内部。车辆用蓄电池44b与控制单元46以及连接器49b电连接。此外,车辆用蓄电池44b不需要必须与控制单元46连接,但为了掌握车辆用蓄电池44b的充电容量,优选与控制单元46或者控制装置40连接。
[0061]
控制单元46是独立地控制后述的马达48a以及马达48b的装置。控制单元46从控制装置40受理控制信号,从托盘用蓄电池44a接受电力的供给。另外,控制单元46对托盘用蓄电池44a以及车辆用蓄电池44b的充电容量进行测定。
[0062]
作为驱动部的马达48a~48d是分别对设置于自走式托盘14的下部的车轮15a~15d进行驱动的轮内马达。马达48a设置于车轮15a,马达48b设置于车轮15b,马达48c设置于车轮15c,马达48d设置于车轮15d。在从控制单元46接受到驱动用的电力的供给的情况下,各马达48a~48d驱动对应的车轮15。在本实施方式中,通过独立地控制各车轮15a~15d来改变自走式托盘14的行进方向,但并不局限于此,也可以构成为能够使至少2个车轮15转向来控制行进方向。
[0063]
连接器49a设置于主体部14a的侧部,是用于在对托盘用蓄电池44a充电的情况下与外部电源连接的端子。
[0064]
连接器49b设置于主体部14a的侧部,是用于在对车辆用蓄电池44b充电的情况下与外部电源连接、在将车辆用蓄电池44b的电力供给至车辆12的情况下与车辆12的连接器29连接的端子。
[0065]
如图5所示,在本实施方式的控制装置40中,通过cpu40a执行存储于rom40b的控制程序来作为取得部200以及自主控制部210发挥功能。
[0066]
取得部200取得外部传感器41收集到的环境信息,详细而言取得由照相机41a拍摄到的图像信息、毫米波雷达41b的检测信息以及光学雷达41c的扫描信息。另外,取得部200从gps装置42取得自走式托盘14的位置信息,从载荷传感器43取得货物p的重量所涉及的信息。并且,取得部200能够从控制单元46分别取得托盘用蓄电池44a以及车辆用蓄电池44b的充电容量。
[0067]
自主控制部210具有通过基于从外部传感器41取得的环境信息控制控制单元46来使自走式托盘14自主地行驶的功能。本实施方式的自主控制部210基于经由无线通信i/f40e而接收到的指令来驱动各马达48a~48d,使自走式托盘14行驶至由指令指定的地点。
[0068]
(管理服务器)
[0069]
如图6所示,作为指示部的管理服务器30构成为包括cpu30a、rom30b、ram30c、储存器30d以及通信i/f30e。cpu30a、rom30b、ram30c、储存器30d以及通信i/f30e经由内部总线30g连接为相互能够通信。cpu30a、rom30b、ram30c以及通信i/f30e的功能与上述的车载器20的cpu20a、rom20b、ram20c以及无线通信i/f20e相同。此外,通信i/f30e也可以进行有线的通信。
[0070]
作为存储部的储存器30d由hdd(hard disk drive)或者ssd(solid state drive)构成,存储有各种程序以及各种数据。
[0071]
cpu30a从储存器30d读出程序,将ram30c作为工作区域来执行程序。
[0072]
在本实施方式的储存器30d存储有处理程序100、状态db(数据库)110以及配送计划db120。
[0073]
作为输送程序的处理程序100是用于实现管理服务器30所具有的各功能的程序。
[0074]
状态db110是汇集了自走式托盘14的状态的数据库。如图7所示,例如在状态db110存储有自走式托盘14的个体编号、所装载的货物p的货物名、托盘用蓄电池44a的充电容量、车辆用蓄电池44b的充电容量以及自走式托盘14的当前地。基于从各自走式托盘14接收到的托盘用蓄电池44a及车辆用蓄电池44b的充电容量、以及自走式托盘14的当前位置来生成状态db110。货物p的信息可以从自走式托盘14取得,也可以从后述的配送计划db取得。此外,各自走式托盘14的信息可以每隔规定时间更新,也可以随时更新。
[0075]
在图7的例子中,状态db110存储有托盘1~8这8台自走式托盘14的状态。在各自走式托盘14装载有部件a、部件b以及部件c中的任一个作为货物p,或者什么都未装载(在图7中用“―”表示)。托盘用蓄电池44a的充电容量及车辆用蓄电池44b的充电容量分别以与充满电时的容量对应的百分比来存储。此外,在未搭载车辆用蓄电池44b的情况下,在该图中用“―”表示。在该图中,当前地用地点的名称表示,但也可以用纬度经度或者规定的坐标来表示。
[0076]
配送计划db120是汇集了由车辆12以及自走式托盘14输送的货物p的配送计划的数据库。配送计划db120至少存储有被装载于自走式托盘14的货物p的信息以及自走式托盘14的接纳场所。存储于配送计划db120的配送计划可以在管理服务器30中生成,也可以例如从管理物流的外部的服务器取得。
[0077]
(控制的流程)
[0078]
关于本发明的输送方法,使用图8a以及图8b的流程图对在本实施方式的管理服务器30中执行的引导处理的流程进行说明。该处理通过cpu30a执行处理程序100来实现。
[0079]
在图8a的步骤s100中,管理服务器30的cpu30a取得配送计划。具体而言,cpu30a参照配送计划db120而取得车辆12以及各自走式托盘14的配送计划。
[0080]
在步骤s101中,确认一个自走式托盘14的状态。即,cpu30a参照存储于储存器30d的状态db110。
[0081]
在步骤s102中,cpu30a确认指令。即,确认是否对于自走式托盘14已经发送了输送指令、充电指令以及返回指令中的任一个指令。
[0082]
在步骤s103中,cpu30a进行是否参照了状态db110中的全部的自走式托盘14的判定。在cpu30a判定为参照了全部的自走式托盘14的情况下(在步骤s103中为“是”的情况下),使引导处理结束。另一方面,在cpu30a判定为未参照全部的自走式托盘14的情况下(在步骤s103中为“否”的情况下),进入至步骤s104。
[0083]
在步骤s104中,cpu30a进行是否未发送指令的判定。在cpu30a判定为未发送指令的情况下(在步骤s104中为“是”的情况下),进入至步骤s105。另一方面,在cpu30a判定为并非未发送指令的情况下(在步骤s104中为“否”的情况下),进入至步骤s107。
[0084]
在步骤s105中,cpu30a进行是否存在货物p的装载的判定。在cpu30a判定为存在货物p的装载的情况下(在步骤s105中为“是”的情况下),进入至步骤s106。另一方面,在cpu30a判定为不存在货物p的装载的情况下(在步骤s105中为“否”的情况下),进入至图8b的步骤s108。
[0085]
在步骤s106中,cpu30a发送输送指令。即,对于自走式托盘14指示直到货物p的接纳场所为止的行驶。由此,接收到输送指令的自走式托盘14将所装载的货物p输送至接纳场所。
[0086]
在步骤s107中,cpu30a指示下一个自走式托盘14的参照。然后,返回至步骤s101。
[0087]
在图8b的步骤s108中,cpu30a进行托盘用蓄电池44a的充电容量是否降低的低下。例如,在托盘用蓄电池44a的充电容量低于25%的情况下,cpu30a判定为充电容量低下。在cpu30a判定为托盘用蓄电池44a的充电容量低下的情况下(在步骤s108中为“是”的情况下),进入至步骤s112。另一方面,在cpu30a判定为托盘用蓄电池44a的充电容量不低下的情况下(在步骤s108中为“否”的情况下),进入至步骤s109。
[0088]
在步骤s109中,cpu30a进行自走式托盘14是否搭载有车辆用蓄电池44b的判定。在cpu30a判定为搭载有车辆用蓄电池44b的情况下(在步骤s109中为“是”的情况下),进入至步骤s110。另一方面,在cpu30a判定为未搭载车辆用蓄电池44b的情况下(在步骤s109中为“否”的情况下),进入至步骤s113。
[0089]
在步骤s110中,cpu30a进行车辆用蓄电池44b的充电容量是否低下的判定。例如,在车辆用蓄电池44b的充电容量低于30%的情况下,cpu30a判定为充电容量低下。在cpu30a判定为车辆用蓄电池44b的充电容量低下的情况下(在步骤s110中为“是”的情况下),进入至步骤s111。另一方面,在cpu30a判定为车辆用蓄电池44b的充电容量不低下的情况下(在步骤s110中为“否”的情况下),进入至步骤s113。
[0090]
在步骤s111中,cpu30a进行车辆用蓄电池44b是否需要充电的判定。例如,在车辆用蓄电池44b已经充电完毕的自走式托盘14存在多台的情况下,为了抑制因充电而无法移
动的自走式托盘14的台数,在超过规定数量的自走式托盘14中,能够省略车辆用蓄电池44b的充电。在cpu30a判定为车辆用蓄电池44b需要充电的情况下(在步骤s111中为“是”的情况下),进入至步骤s112。另一方面,在cpu30a判定为不需要车辆用蓄电池44b的充电的情况下(在步骤s111中为“否”的情况下),进入至步骤s113。
[0091]
在步骤s112中,cpu30a发送充电指令。即,对于自走式托盘14指示直到充电场所为止的行驶。由此,接收到充电指令的自走式托盘14行驶至充电场所,通过将连接器49a、49b连接至位于该充电场所的充电器,从而进行托盘用蓄电池44a或者车辆用蓄电池44b的充电。此外,即便是仅托盘用蓄电池44a以及车辆用蓄电池44b中的任一方的充电容量低下的情况,也可以进行托盘用蓄电池44a以及车辆用蓄电池44b两方的充电。若充电指令的发送完成,则返回至图8a的步骤s107。
[0092]
在步骤s113中,cpu30a发送返回指令。即,对于自走式托盘14指示向车辆12的行驶。由此,接收到返回指令的自走式托盘14行驶至车辆12的货箱12a。此外,通过将连接器49b与设置于货箱12a的连接器29连接,从而向功率控制单元26供给车辆用蓄电池44b的电力。若返回指令的发送完成,则返回至图8a的步骤s107。
[0093]
通过如以上那样执行引导处理,使得在图7的状态db110中被参照的各自走式托盘14如以下那样移动。首先,装载有货物p的自走式托盘14按照输送计划将货物p输送至接纳场所。即,托盘1将部件a从车辆1输送至接纳场所,托盘2将部件b从车辆1输送至接纳场所,托盘5将部件b从车辆2输送至接纳场所,托盘6将部件c从车辆2输送至接纳场所。
[0094]
另一方面,关于未载有货物p的状态的自走式托盘14,移动目的地根据托盘用蓄电池44a以及车辆用蓄电池44b的充电容量而变化。即,对于托盘3而言,托盘用蓄电池44a以及车辆用蓄电池44b的充电容量分别不低下,从货物p的接纳场所亦即交付口1向车辆12移动。另外,托盘4由于托盘用蓄电池44a的充电容量低下至25%以下,所以从货物p的接纳场所亦即交付口2向充电场所移动。另外,托盘7由于车辆用蓄电池44b的充电容量低下至30%以下,所以从货物p的接纳场所亦即交付口2向充电场所移动。并且,托盘8由于托盘用蓄电池44a的充电容量低下至25%以下、车辆用蓄电池44b的充电容量低下至30%以下,所以从货物p的接纳场所亦即交付口1向充电场所移动。
[0095]
(实施方式的总结)
[0096]
以上,本实施方式的输送系统10具备车辆12、作为输送体的自走式托盘14、以及作为指示部的管理服务器30。本实施方式的自走式托盘14能够在地上行驶,并构成为能够收纳于车辆12的货箱12a。另外,本实施方式的管理服务器30对于装载有货物p的自走式托盘14指示从车辆12的抵达地至该货物p的接纳场所为止的移动。另外,在接纳场所卸下了货物p之后,管理服务器30根据状况来指示未载有货物p的自走式托盘14的到车辆12为止的移动。
[0097]
因此,根据本实施方式的输送系统10,在将货物p从车辆12的抵达地运输至接纳场所的情况下,能够省去货物p向其他车辆的重新装载作业。由此,能够抑制货物的装卸时间的损失。
[0098]
此外,对于在接纳场所被卸下了货物p后的自走式托盘14,也可以装载其他货物。即,当在接纳场所被卸下了货物p之后,管理服务器30能够指示装载有其他货物的自走式托盘14的到车辆12为止的移动。由此,能够在其他货物的输送中使用完成了货物p的输送的车
辆12,能够实现车辆12对货物p以及其他货物的输送的高效化。
[0099]
另外,在本实施方式中,其特征在于,自走式托盘14自主地行驶。因此,根据本实施方式,不需要在使不具有动力源的托盘移动的情况下所需的牵引车辆等。
[0100]
另外,根据本实施方式,通过利用使大小等规格共通化、即标准化的自走式托盘14,能够在不同的车辆12间随意使用自走式托盘14。例如,在某个车辆12中,即便不等待将货物p从本车辆输送至接纳场所的自走式托盘14的返回而将其他自走式托盘14收纳于车辆12也不产生妨碍。因此,根据本实施方式,能够省去从车辆12出发了的自走式托盘14返回至该车辆12为止的待机时间,能够实现货物p的输送的进一步的高效化。
[0101]
并且,在本实施方式中,收纳自走式托盘14的车辆12是由蓄电池驱动的电动汽车。在本实施方式中,驱动车辆12的车辆用蓄电池44b被搭载于自走式托盘14,通过自走式托盘14的更换可进行车辆用蓄电池44b的更换。这里,当在车辆12具备车辆用的蓄电池的情况下,在蓄电池的充电完成之前车辆12无法移动。与此相对,根据本实施方式,通过将预先搭载有充电完毕的车辆用蓄电池44b的自走式托盘14收纳于车辆12,能够与在车辆12具备蓄电池的情况相比减少伴随充电的停车时间。
[0102]
[第2实施方式]
[0103]
在第1实施方式中,基于预先取得的配送计划来输送货物p,但在第2实施方式中,基于标注于货物p的识别标签(identification tag)的信息来进行输送。以下,对与第1实施方式的不同点进行说明。此外,对相同的说明标注相同的附图标记而省略说明。
[0104]
在本实施方式的输送系统10中,在货物p显示有作为识别标签的识别码ic(参照图3),自走式托盘14的照相机41a构成为除了能够拍摄自走式托盘14的前方之外还能够拍摄被装载于装载部14b的货物p的识别码ic。本实施方式的识别码ic为qr码(注册商标)。
[0105]
在本实施方式的控制装置40中,若取得部200取得了识别码ic的图像信息,则自主控制部210基于记录于识别码ic的配送地信息来使自走式托盘14行驶至该配送地亦即货物p的接纳场所。
[0106]
根据本实施方式,不需要预先取得或者生成配送计划的处理。另外,根据本实施方式,通过将接纳场所的信息与识别码ic建立对应,由此即便在车辆12内产生货物p的重新装载等,也不需要重新指定接纳场所的处理。此外,作为识别标签的识别码并不局限于qr码,也可以应用条形码、其他二维码。
[0107]
[第3实施方式]
[0108]
在第3实施方式中,特征在于根据货物p的重量来改变输送目的地。以下,对与第1实施方式的不同点进行说明。此外,对相同的说明标注相同的附图标记而省略说明。
[0109]
在本实施方式的控制装置40中,若取得部200从载荷传感器43取得了货物p的重量的信息,则自主控制部210基于由载荷传感器43测定出的重量来使自走式托盘14行驶至多个接纳场所中的一个接纳场所。
[0110]
根据本实施方式,在相同的货物p的接纳场所存在多个的情况下,通过基于由载荷传感器43测定出的重量来选择接纳场所,能够实现从车辆12的抵达地向目的地的输送的高效化。
[0111]
[备注]
[0112]
在上述各实施方式中,管理服务器30作为指示自走式托盘14的移动的指示部发挥
功能,但并不局限于此,也可以在车辆12的车载器20设置指示部的功能。
[0113]
在上述各实施方式中,托盘用蓄电池44a以及车辆用蓄电池44b通过接触式的充电器来实施充电,但并不局限于此,也可以通过非接触式的充电器进行充电。
[0114]
在第3实施方式中,根据货物p的重量来改变输送目的地,但并不局限于此,可以根据托盘用蓄电池44a的充电容量或者车辆用蓄电池44b的充电容量来改变输送目的地。例如,在托盘用蓄电池44a的充电容量低的情况下,通过指定与车辆12的往复距离短的输送目的地,能够确保托盘用蓄电池44a的充电时间。针对车辆用蓄电池44b也同样。
[0115]
此外,在上述实施方式中由cpu20a、30a、40a读出软件(程序)并执行的各种处理也可以由cpu以外的各种处理器执行。作为该情况下的处理器,可例示fpga(field-programmable gate array)等在制造后能够变更电路结构的具有pld(programmable logic device)以及asic(application specific integrated circuit)等为了执行特定的处理而设计成专用的电路结构的处理器亦即专用电路等。另外,上述的受理处理可以由这些各种处理器中的1个执行,也可以由同种类或者不同种类的2个以上处理器的组合(例如多个fpga、以及cpu与fpga的组合等)执行。另外,这些各种处理器的硬件构造更具体是组合了半导体元件等电路元件的电路。
[0116]
另外,在上述实施方式中,以各程序被预先存储(安装)于计算机可读取的非暂时性记录介质的形态进行了说明。例如,车载器20中的控制程序被预先存储于rom20b,控制装置40中的控制程序被预先存储于rom40b,管理服务器30中的处理程序100被预先存储于储存器30d。然而,并不局限于此,各程序也可以以记录于cd-rom(compact disc read only memory)、dvd-rom(digital versatile disc read only memory)以及usb(universal serial bus)存储器等非暂时性记录介质的方式提供。另外,也可以程序是经由网络从外部装置下载的方式。
[0117]
上述实施方式中的处理不仅可以由1个处理器执行,也可以由多个处理器配合来执行。上述实施方式中说明的处理的流程也是一个例子,在不脱离主旨的范围内,可以删除不需要的步骤、追加新的步骤、更换处理顺序。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。