技术特征:
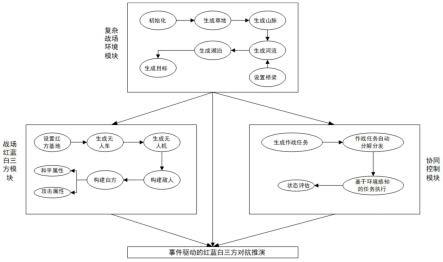
1.基于多智能体的有无人协同体系作战仿真系统,其特征在于,包括复杂战场环境模块、战场多方模块、协同控制模块、以及多方对抗推演模块;所述复杂战场环境模块用于自动生成战场环境,基于层叠模型对战场环境进行构建;所述战场多方模块用于自动生成我方、敌方以及未知方作战编组,对每个作战编组的作战单元赋予兵力以及简单智能,以模拟作战;所述协同控制模块基于对战场环境的感知与任务式指挥控制,将作战任务分配给我方不同的作战单元,使我方作战单元依靠环境感知自主地规划作战行为;所述多方对抗推演模块依靠对应指令,使各个作战单元执行作战行为。2.根据权利要求1所述的基于多智能体的有无人协同体系作战仿真系统,其特征在于,所述复杂战场环境模块动态生成战场环境,包括障碍物和自然环境要素,以及物理约束模型。3.根据权利要求1所述的基于多智能体的有无人协同体系作战仿真系统,其特征在于,所述战场多方模块构建作战编组时,各作战单元均使用bdi模型架构实现自主,通过fipa acl协议传达信念。4.根据权利要求1所述的基于多智能体的有无人协同体系作战仿真系统,其特征在于,所述协同控制模块包括决策支持单元,竞标单元以及智能孪生体;所述决策支持单元用于将指挥员的作战意图翻译成顶层作战方案,并结合战场态势与作战要素的监控资源及通信状态形成作战任务;所述竞标单元用于实现所述作战任务的分解与分发;所述智能孪生体用于实现对作战编组的资源抽象与管理、运行状态的提取与分析,向作战编组中各作战单元下达对应的作战指令,并评估分析该指令完成效果;所述决策支持单元通过所述竞标单元与所述智能孪生体实现交互,所述智能孪生体综合所提取与分析的所述作战编组信息形成战场态势、作战要素的监控资源及通信状态,向所述决策支持单元输入。5.根据权利要求4所述的基于多智能体的有无人协同体系作战仿真系统,其特征在于,所述协同控制模块采用边端一体化设计融合边缘计算与作战平台,决策支持单元布置在核心云,智能孪生体布置在边缘云。6.根据权利要求4所述的基于多智能体的有无人协同体系作战仿真系统,其特征在于,所述协同控制模块内设有多个智能孪生体,每个所述智能孪生体对应作战编组内的不同编组。7.一种基于多智能体的有无人协同体系作战仿真方法,应用于如权利要求1-6任意一项所述的基于多智能体的有无人协同体系作战仿真系统,其特征在于,包括如下步骤:s1、环境初始化,同时初始化红方作战编组与目标任务;s2、复杂环境构建,所构建的环境要素包括障碍物和自然环境,同时还包括物理约束模型,用于输入物理世界的实际约束;s3、多方智能体构建,生成我方、敌方以及未知方作战编组,其中敌方和未知方根据战场环境自动生成,再赋予各作战编组的作战单元兵力以及简单智能;s4、事件驱动的仿真推演。8.根据权利要求7所述的基于多智能体的有无人协同体系作战仿真方法,其特征在于,s3中构件作战编组时,作战单元均使用bdi模型架构实现自主,通过fipa acl协议传达信
念。9.根据权利要求7所述的一种基于多智能体的有无人协同体系作战仿真方法,其特征在于,s4中我方依靠协同控制方法,基于对战场环境的感知与任务式指挥控制模式,将作战任务分配给不同作战编组的作战单元,作战单元通过环境感知自主地规划作战行为;敌方以分散的方式感知我方兵力和战场环境,在约束条件下随机地移动,自主地实行规避或者攻击行为;未知方中有一部分是和平的,一部分是敌方的伪装,和平性质的作战单元将也基于战场环境的约束条件下随意移动,不会发生对我方或敌方的攻击行为,而攻击性质的未知方,在发现我方的作战单元后将会执行攻击行为。10.根据权利要求9所述的一种基于多智能体的有无人协同体系作战仿真方法,其特征在于,所述协同控制方法基于所述协同控制模块,具体包括如下子步骤:s41、决策支持单元根据指挥员的作战意图提出任务;s42、通过竞标单元以协商交互的方式向智能孪生体发布任务信息;s43、智能孪生体结合自身状态、资源对接收到的任务进行评估,选择接受任务或拒绝任务;选择接受任务则执行步骤s44,拒绝任务则结束步骤;s44、智能孪生体将实施方案的建议信息和自身状态、资源发送给决策支持单元;s45、决策支持单元对智能孪生体所建议的实施方案进行评估,判断该智能孪生体是否有能力执行任务;判断有能力则执行步骤s46,判断无能力则结束步骤;s46、决策支持单元将任务分配方案反馈至智能孪生体,由智能孪生体向作战编队中的作战单元发送指令;s47、智能孪生体在作战编队执行任务的同时,结合所提取的战场态势、作战要素的监控资源及通信状态对任务执行效果进行评估,形成反馈信息发送至决策支持单元;s48、决策支持单元根据反馈信息对作战任务的执行情况进行评估,形成新的任务信息,循环至步骤s42,直至任务完成。
技术总结
本发明提供了一种基于多智能体的有无人协同体系作战仿真方案,包括复杂战场环境模块、战场多方模块、协同控制模块、以及多方对抗推演模块;复杂战场环境模块用于自动生成战场环境;战场多方模块用于自动生成我方、敌方以及未知方作战编组,对每个作战编组的作战单元赋予兵力以及简单智能;协同控制模块将作战任务分配给我方不同的作战单元,使我方作战单元依靠环境感知自主地规划作战行为;多方对抗推演模块依靠对应指令,使各个作战单元执行作战行为。本发明解决了在未来高烈度战场环境下,智能化作战单元动态组合和重组的问题,为新质作战样式的能力生成机理提供了一种有效的验证方式。证方式。证方式。
技术研发人员:王敬超 任双印 邓博于 杨晓
受保护的技术使用者:军事科学院系统工程研究院网络信息研究所
技术研发日:2022.02.25
技术公布日:2022/6/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。