1.本发明涉及实时系统、电网系统以及混合关键系统的实时调度,特别涉及一种非抢占动态优先级混合关键任务能耗感知实时调度方法。
背景技术:
2.实时系统不仅需要确保输出结果的正确性,而且要确保结果在限定的时间内输出。数控系统、电网系统以及大多数嵌入式设备等都属于实时系统。近年来,随着计算机技术以及半导体技术的快速发展,实时系统的发展趋势是将多个不同层次的应用集成到同一个共享平台上,形成混合关键系统。混合关键系统将系统的任务划分为不同的关键层次,高关键层次任务需要进行安全认证,而低关键层次任务无需安全认证。心脏起搏器、无人机和汽车自动驾驶系统是典型的混合关键系统。
3.现有混合关键系统的研究,主要采用抢占性的调度策略调度任务。而抢占性调度策略系统开销比较大,不适用于应用任务固定的系统。此外,少数的非抢占能耗感知调度算法,采用固定优先级策略调度任务,导致系统的利用率偏低。因此,提出一种非抢占动态优先级混合关键任务能耗感知实时调度方法。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,提供一种非抢占动态优先级混合关键任务能耗感知实时调度方法。
5.为了实现上述目的,本发明的技术方案是:
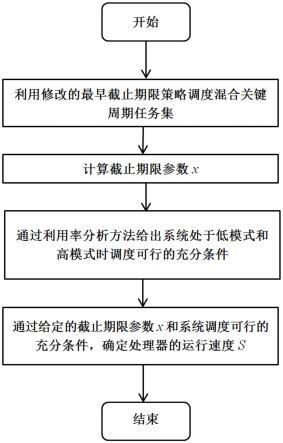
6.一种非抢占动态优先级混合关键任务能耗感知实时调度方法,包括:
7.利用修改的最早截止期限策略调度混合关键周期任务集;
8.计算截止期限参数x;
9.通过利用率分析方法给出系统处于低模式和高模式时调度可行的充分条件;
10.通过给定的截止期限参数x和系统调度可行的充分条件,确定处理器的运行速度s;
11.所述利用修改的最早截止期限策略调度混合关键周期任务集,包括:
12.考虑混合关键周期任务集γ={τ1,τ2,
…
,τn},每个混合关键周期任务τi由四元组{ti,di,ξi,ci}组成,其中,1≤i≤n,i为整数,ti表示混合关键周期任务τi的周期;di表示混合关键周期任务τi的相对截止期限,且其等于ti;ξi表示混合关键周期任务τi的关键层次,其表示为ξi={lo,hi},混合关键周期任务τi的关键层次为lo时,其为低关键层次任务,混合关键周期任务τi的关键层次为hi时,其为高关键层次任务;ci表示混合关键周期任务τi的不同模式下的最坏情况下执行时间;ci(lo)表示混合关键周期任务τi在低模式下的执行时间;ci(hi)表示混合关键周期任务τi在高模式下的执行时间;系统处于低模式是指任何任务τi在处理器速度s下,其执行时间都不超过ci(lo)/s;系统处于高模式是指存在高关键层次任务τi在处理器速度s下,其执行时间超过ci(lo)/s且所有低关键层次任务都被舍弃;如果混
合关键周期任务τi为低关键层次任务,则ci(hi)=ci(lo);如果混合关键周期任务τi为高关键层次任务,则ci(hi)》=ci(lo);该任务集由修改的最早截止期限策略调度;所述修改的最早截止期限策略是指在不同的系统模式,给高关键层次任务分配不同的截止期限;由截止期限确定任务的优先级,优先级高的任务优先调度;在系统处于低模式和高模式时,高关键层次任务τi的截止期限分别为ai xti和ai ti,其中ai是高关键层次任务τi的到达时间。
13.优选的,所述计算截止期限参数x,具体包括:
14.将混合关键周期任务集按照其周期进行非降序排序,即t1≤t2≤...,≤tn;根据非抢占动态优先级调度策略,截止期限参数x根据下式获取:
[0015][0016]
其中,x
lb
由下式计算:
[0017][0018]
其中,是所有高关键层次任务在系统处于低模式时的利用率之和;是所有低关键层次任务在系统处于低模式时的利用率之和;是任务τk在系统处于高模式时的利用率;是任务τi在系统处于高模式时的利用率;是任务τj在系统处于低模式时的利用率;hehi(i)是优先级比任务τi高的高关键层次任务集合;helo(i)分别是优先级比任务τi高的低关键层次任务集合;un是所有高关键层次任务的额外负载之和。
[0019]
优选的,所述通过利用率分析方法给出系统处于低模式和高模式时调度可行的充分条件,具体包括:
[0020]
系统处于低模式时调度可行的充分条件由下式给出:
[0021][0022][0023][0024]
系统处于高模式时调度可行的充分条件由下式给出:
[0025][0026][0027][0028]
其中,t1是任务τ1的周期;ti是任务τi的周期;t
tr
是系统从低模式切换到高模式的时刻。
[0029]
优选的,所述通过给定的截止期限参数x和系统调度可行的充分条件,确定处理器
的运行速度s,具体包括:
[0030]
处理器的运行速度s由下式计算:
[0031][0032]
其中,s
min
是处理器提供的最小运行速度,s
t
由下式计算:
[0033][0034]
其中,是任务τi在系统处于低模式时的利用率;是任务τk在系统处于低模式时的利用率;mi和mk分别是任务τi和τk额外负载的利用率。
[0035]
由上述对本发明的描述可知,与现有技术相比,本发明具有如下有益效果:
[0036]
(1)本发明方法比现有的混合关键系统周期任务调度方法比节约大约25.24%能耗;
[0037]
(2)本发明方法能够确保周期任务在其截止期限内完成执行且提供系统利用率;
[0038]
(3)本发明方法能够降低混合关键系统的能耗,进而能够降低产品的生产成本,提高产品的可靠性;
[0039]
以下结合附图及实施例对本发明作进一步详细说明,但本发明的一种非抢占动态优先级混合关键任务能耗感知实时调度方法不局限于实施例。
附图说明
[0040]
图1为本发明方法的流程图示意图。
具体实施方式
[0041]
以下将结合本发明附图,对本发明实施例中的技术方案进行详细描述和讨论。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0042]
参见图1所示,本发明的一种非抢占动态优先级混合关键任务能耗感知实时调度方法,包括如下步骤:
[0043]
步骤1:利用修改的最早截止期限策略调度混合关键周期任务集。
[0044]
考虑混合关键周期任务集γ={τ1,τ2,
…
,τn},每个混合关键周期任务τi(1≤i≤n,i为整数)由四元组{ti,di,ξi,ci}组成,其中ti表示混合关键周期任务τi的周期;di表示混合关键周期任务τi的相对截止期限,且其等于ti;ξi表示混合关键周期任务τi的关键层次,其表示为ξi={lo,hi},混合关键周期任务τi的关键层次为lo时,其为低关键层次任务,混合关键周期任务τi的关键层次为hi时,其为高关键层次任务;ci表示混合关键周期任务τi的不同模式下的最坏情况下执行时间;ci(lo)和ci(hi)分别表示混合关键周期任务τi在低模式和高模式下的执行时间;系统处于低模式是指任何任务τi在处理器速度s下,其执行时间都不超过ci(lo)/s;系统处于高模式是指存在高关键层次任务τi在处理器速度s下,其执行时间超过ci(lo)/s且所有低关键层次任务都被舍弃;如果混合关键周期任务τi为低关键层次任务,则ci(hi)=ci(lo);如果混合关键周期任务τi为高关键层次任务,则ci(hi)》=ci(lo);
该任务集由修改的最早截止期限策略调度。所谓的修改的最早截止期限策略是指在不同的系统模式,给高关键层次任务分配不同的截止期限;由截止期限确定任务的优先级,优先级高的任务优先调度。在系统处于低模式和高模式时,高关键层次任务τi的截止期限分别为ai xti和ai ti,其中ai是高关键层次任务τi的到达时间。截止期限小的任务的优先级越高,截止期限大的任务的优先级越低。任务的截止期限相同时,到达时间越早的优先级越高;到达时间越晚的其优先级越低;任务的截止期限和达到时间都相同时,下标小的任务,其优先级越高,下标大的任务,其优先级越低。
[0045]
步骤2:计算截止期限参数x。
[0046]
将混合关键周期任务集按照其周期进行非降序排序,即t1≤t2≤...,≤tn;根据非抢占动态优先级调度策略,可知截止期限参数x下式给出:
[0047][0048]
其中,x
lb
由下式计算:
[0049][0050]
其中,分别是所有高关键层次任务和所有低关键层次任务在系统处于低模式时的利用率之和;和分别是任务τk和τi在系统处于高模式时的利用率;是任务τj在系统处于低模式时的利用率;hehi(i)是优先级比任务τi高的高关键层次任务集合;helo(i)分别是优先级比任务τi高的低关键层次任务集合;是所有高关键层次任务的额外负载之和;ci(lo),ck(lo),cj(lo)分别是任务τi,τk和τj在系统处于低模式下的执行时间;ci(hi)和ck(hi)分别是任务τi和τk在系统处于高模式下的执行时间;ti,tk,tj分别是任务τi,τk和τj的周期。
[0051]
步骤3:通过利用率分析方法给出系统处于低模式和高模式时调度可行的充分条件。
[0052]
系统处于低模式时调度可行的充分条件由下式给出:
[0053][0054][0055][0056]
系统处于高模式时调度可行的充分条件由下式给出:
[0057][0058][0059][0060]
其中,分别是所有高关键层次任务和所有低关键层次任务在系统处于低模式时的利用率之和;t是实数;t1和ti分别是任务τ1和τi的周期;t
tr
是系统从低模式切换到高模式的时刻;ci(lo)和ci(hi)分别表示混合关键周期任务τi在低模式和高模式下的执行时间;hehi(i)是优先级比任务τi高的高关键层次任务集合;helo(i)分别是优先级比任务τi高的低关键层次任务集合;是所有高关键层次任务的额外负载之和。
[0061]
步骤4:通过给定的截止期限参数x和系统调度可行的充分条件,确定处理器的运行速度s。
[0062]
处理器的运行速度s由下式计算:
[0063][0064]
其中,s
min
是处理器提供的最小运行速度,s
t
由下式计算:
[0065][0066]
其中,分别是所有高关键层次任务和所有低关键层次任务在系统处于低模式时的利用率之和;是任务τi在系统处于低模式时的利用率;是任务τk在系统处于低模式时的利用率;是任务τj在系统处于低模式时的利用率;hehi(i)是优先级比任务τi高的高关键层次任务集合;helo(i)分别是优先级比任务τi高的低关键层次任务集合;是所有高关键层次任务的额外负载之和;和分别是任务τi和τk额外负载的利用率;ci(lo),ck(lo),cj(lo)分别是任务τi,τk和τj在系统处于低模式下的执行时间;ci(hi)和ck(hi)分别是任务τi和τk在系统处于高模式下的执行时间;ti,tk,tj分别是任务τi,τk和τj的周期。
[0067]
本实施例中,混合周期任务集γ={τ1,τ2,τ3}包含3个周期任务;周期任务τ1的周期t1等于5,其相对截止期限为5,关键层次ξ1为lo,即其为低关键层次任务,其低模式最坏情况下执行时间c1(lo)为1;其高模式最坏情况下执行时间c1(hi)为1;周期任务τ2的周期t2等于10,其相对截止期限为10,关键层次ξ2为hi,即其为高关键层次任务,其低模式最坏情况下执行时间c2(lo)为2;其高模式最坏情况下执行时间c2(hi)为3;周期任务τ3的周期t3等于15,其相对截止期限为15,关键层次ξ3为lo,即其为低关键层次任务,其低模式最坏情况下执行时间c3(lo)为3;其高模式最坏情况下执行时间c3(hi)为3;通过计算可知,能耗优化速度s=0.81,在区间[0,30]内调度该任务集,将本发明方法与没有采用动态电压频率调节方法相比较节约大约25.24%的能耗。
[0068]
以上仅为本发明实例中一个较佳的实施方案。但是,本发明并不限于上述实施方案,凡按本发明所做的任何均等变化和修饰,所产生的功能作用未超出本方案的范围时,均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。