1.本发明主要涉及机器人外骨骼技术领域,具体涉及一种用于偏瘫患者的步态自适应控制方法及系统。
背景技术:
2.人体下肢外骨骼系统与传统机器人相似,是一个十分复杂的多输入、多输出的非线性系统,其控制是十分复杂的。现在常用的控制策略有机器人位置控制、运动轨迹跟踪控制、灵敏度放大控制等方法。下面对此三种方法进行说明:1、机器人位置控制方法:该方法在医疗型外骨骼中得到了极大的应用并获得了较大的成功,但是存在难以与使用者行走相协调匹配的缺点,控制效果相对而言并不优越。
3.2、人体运动轨迹跟踪控制方法:通过一定的方法实时检测分析人体关节的运动轨迹,从而实时控制外骨骼的关节实现与人体相一致的运动,这种控制方式可以很好的实现外骨骼运动与人体运动的协调,但这种方式往往需要在人体添加一定的传感器,极大的影响了助力型外骨骼的人体舒适性,导致穿戴极为不方便,所以这种控制方式虽然十分直观方便,但是在助力型外骨骼中应用较少。
4.3、灵敏度放大控制方法:这实质上是一种基于外骨骼模型的控制方法,该方法实时检测外骨骼各关节角度、角速度、角加速度等参数,通过建立的外骨骼数学模型进行逆向动力学求解,从而预判出外骨骼的运动意图。这种控制方法严重依赖于所建立外骨骼动力学数学模型的精确性,这需要花费大量的精力去建立数学模型且难精确。如果有外部干扰,会让外骨骼向响应人体运动一样去响应干扰,从而使系统不稳定且有摔倒的趋势。
技术实现要素:
5.本发明要解决的技术问题就在于:针对现有技术存在的问题,本发明提供一种控制简单稳定的用于偏瘫患者的步态自适应控制方法及系统。
6.为解决上述技术问题,本发明提出的技术方案为:一种用于偏瘫患者的步态自适应控制方法,包括步骤:检测正常腿侧的角度θa,得到当前的步幅信息θ
st
和步速信息ωs;将连续时间内的角度θa整合为一个动作曲线,并将动作曲线与预定义动作曲线进行对比,获得下个步态预设动作;根据下个步态预设动作以及当前步幅信息θ
st
和步速信息ωs,得到下个步态的动作曲线;根据下个步态的动作曲线,控制患腿侧的动作。
7.优选地,还包括采用镜像模式控制以实现正常腿与患腿的同步:当患腿和正常腿有位置差时,该差值经过pid控制后产生一个动作指令,通过动作指令的速度与位置来进行同步控制。
8.优选地,当前的步幅信息θ
st
的得到过程为:
检测正常腿侧的角度θa,记录角度θa在一段时间内的峰值θm,再根据当前步态信息得到当前步态中最有可能的步幅角度θ
max
;同时对θa进行滤波,输出一个滤波后的现在角度θ
cur
;根据θ
cur
和θ
max
得到步态中的步幅信息θ
st
。
9.优选地,当前的步速信息ωs的得到过程为:将角度θa进行一时间范围内的微分处理获得该时间范围内的角速度ωa,再得到此时间范围内的平均角速度ω
av
;根据角速度ωa获得运行中最大的角速度ω
max
以及最小的角速度ω
min
,再根据当前步态信息得到需要的步速信息ωs。
10.优选地,得到下个步态的动作曲线的具体过程为:将连续时间内的角度θa整合为一个动作曲线,并将动作曲线与预定义动作库的标准动作曲线进行模糊运算的对比,获得最有可能的动作信息;如果达到指定条件,输出下个步态的命令以及预设动作。
11.本发明还公开了一种用于偏瘫患者的步态自适应控制系统,包括:步幅信息获取模块,用于检测正常腿侧的角度θa,得到当前步幅信息θ
st
;步速信息获取模块,用于检测正常腿侧的角度θa,得到当前步速信息ωs;步态信息获取模块,用于将连续时间内的角度θa整合为一个动作曲线,并将动作曲线与预定义动作曲线进行对比,获得下个步态预设动作;动作产生模块,用于根据下个步态预设动作以及当前步幅信息θ
st
和步速信息ωs,得到下个步态的动作曲线;动作控制模块,用于根据下个步态的动作曲线,控制患腿侧的动作。
12.本发明进一步公开了一种用于偏瘫患者的步态自适应控制系统,包括角度传感器、信号处理单元、动作产生器和运动控制器;所述角度传感器用于检测正常腿侧的角度θa,所述信号处理单元用于根据角度θa得到当前的步幅信息θ
st
、步速信息ωs和下个步态预设动作,所述动作产生器用于根据下个步态预设动作以及当前步幅信息θ
st
和步速信息ωs,得到下个步态的动作曲线,所述运动控制器用于根据下个步态的动作曲线,控制患腿侧的动作。
13.优选地,所述角度传感器包括磁编码角度传感器、电阻式角度传感器、mpu姿态传感器、位置传感器或摄像头中的一种或多种。
14.优选地,还包括用于触发患腿侧自动运动的触发传感器,所述触发传感器包括拉压力传感器、薄膜压力传感器、力矩传感器或位置接触传感器中的一种或多种。
15.与现有技术相比,本发明的优点在于:本发明以正常腿的参照运动来同步修改患腿的预设运动的自适应策略,相对于目前几种控制策略(机器人位置控制,运动轨迹跟踪控制,灵敏度放大控制),控制简单稳定,有效解决每个使用者步态不一致的问题,且能根据每个使用过程中需要的运动能力自动进行调整,比如快走,慢走都能实现动作匹配;在遇到上下坡度,上下楼时,也可以根据预设的运动轨迹实现相对动作模式输出。
附图说明
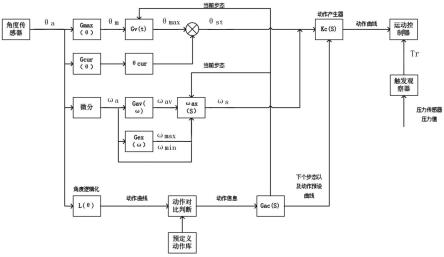
16.图1为本发明的自适应控制方法在实施例的控制框图。
17.图2为本发明的镜像控制方法在实施例的控制框图。
具体实施方式
18.以下结合说明书附图和具体实施例对本发明作进一步描述。
19.如图1所示,本发明实施例的用于偏瘫患者的步态自适应控制方法,包括步骤:检测正常腿侧的角度θa,得到当前的步幅信息θ
st
和步速信息ωs;将连续时间内的角度θa整合为一个动作曲线,并将动作曲线与预定义动作曲线进行对比,获得下个步态预设动作;根据下个步态预设动作以及当前步幅信息θ
st
和步速信息ωs,得到下个步态的动作曲线;根据下个步态的动作曲线,控制患腿侧的动作。
20.本发明以正常腿的参照运动来同步修改患腿的预设运动的自适应策略,相对于现有几种控制策略(机器人位置控制,运动轨迹跟踪控制,灵敏度放大控制),控制简单稳定,有效解决每个使用者步态不一致的问题,且能根据每个使用过程中需要的运动能力自动进行调整,比如快走,慢走都能实现动作匹配;在遇到上下坡度,上下楼时,也可以根据预设的运动轨迹实现相对动作模式输出。
21.在一具体实施例中,还包括采用镜像模式控制以实现正常腿与患腿的同步:当患腿和正常腿有位置差(如关节角度差)时,该差值经过pid的微分、积分和比例控制后产生一个动作指令,通过动作指令的速度与位置来进行同步控制。本发明在镜像控制中可以实现两条腿的同步控制,比如上下起蹲的控制;使用该控制策略,可以让穿戴该外骨骼的使用者实现弯腰拿取东西的功能,也可以实现通过正常腿的运动控制患腿运动的康复训练模式。
22.在一具体实施例中,当前的步幅信息θ
st
的得到过程为:检测正常腿侧的角度θa(如30
°
),输入到gmax(θ)函数,记录一段时间内的最大存在的
±
θa并转化为θm(其中在gmax(θ)函数中,如果θa大于上次存入的θa,则让θm=θa,主要目标是获取θa过程中出现的峰值,比如当前角度30
°
》上次记录的角度θ
last
=29
°
,则让θm=30
°
),再传递到gv(t)函数中,并根据当前步态信息函数得到当前步态中最有可能的步幅角度θ
max
(其中根据不同步态给出不同的值域范围z[θ
min
,θ
max
],比如行走z[25
°
,35
°
], 如果θm=30
°
,则θm∈z,θ
max
=30
°
,否则设定最贴近的范围值,比如θm=36,则取35,θm=20,则取25,取值不会超过值域);同时将θa输入gcur(θ)滤波函数(θ
cur
=(θa*3 θ
last
)/4 ,θ
last
为上一次的θa,如θ
last
=29
°
,θa=30
°
,q
cur
≈30
°
),输出一个滤波后的现在角度θ
cur
,将θ
cur
和θ
max
组合起来,变为步态中的步幅信息θ
st
(θ
st
包括θ
cur
和θ
max
,通过相应数据结构方式来实现)。
[0023]
在一具体实施例中,当前的步速信息ωs的得到过程为:将角度θa进行小段时间内的微分处理获得该时间范围内的角速度ωa,然后经过步态平均函数gav(ω)(,ωk为k时刻的ωa值)获得平均角速度ω
av
;角速度ωa经过最大最小记录函数gex(ω)(其中ω
max
=max(ω
max
,ω
av
),ω
min
=min(ω
min
,ω
av
),举例说明,当前ω
max
为50时, 如果ω
av
是51,则更新ω
max
为51, 如果ω
av
时48,则ω
max
则继续保存50;如果当前ω
min
为30时,如果ω
av
是28,则更新ω
min
是28,如果ω
av
是
33,则ω
min
则继续保持30),获得运行中最大的角速度ω
max
以及最小的角速度ω
min
;最终经过ω
ax
(s)函数以及当前步态信息得到需要的同步步速信息ωs(根据不同的步态给出不同的值域范围z[ωa,ωb],如果ω
av
∈z, 则将ω
av
以及ω
max
和ω
min
记录在ωs中;如果不在范围内,则设定值域范围内最贴近的值,以及ω
max
和ω
min
通过数据结构形式记录在ωs中;举例说明,ω
av
如果是20,则取15,ω
av
如果是9,则取10;ω
av
的值必须在规定的值域范围内)。
[0024]
在一具体实施例中,得到下个步态的动作曲线的具体过程为:将角度θa放入到l(θ)(θ
l
={θ1,θ2, ....θ
100
};将θa存放到θ
l
中,让θ
l
保持最新的θa值)中,将连续时间内的角度整合为一个动作曲线,并将动作曲线与预定义动作库的标准动作曲线进行模糊运算的对比,获得最有可能的动作信息传递到动作调节函数gac(s)中进行简单逻辑运算;如果达到指定条件,该函数会输出下个步态的命令以及预设动作。
[0025]
本发明实施例还公开了一种用于偏瘫患者的步态自适应控制系统,包括:步幅信息获取模块,用于检测正常腿侧的角度θa,得到当前步幅信息θ
st
;步速信息获取模块,用于检测正常腿侧的角度θa,得到当前步速信息ωs;步态信息获取模块,用于将连续时间内的角度θa整合为一个动作曲线,并将动作曲线与预定义动作曲线进行对比,获得下个步态预设动作;动作产生模块,用于根据下个步态预设动作以及当前步幅信息θ
st
和步速信息ωs,得到下个步态的动作曲线;动作控制模块,用于根据下个步态的动作曲线,控制患腿侧的动作。
[0026]
本发明的用于偏瘫患者的步态自适应控制系统,与上述的控制方法相对应,同样具有如上方法所述的优点。
[0027]
本发明实施例进一步公开了一种用于偏瘫患者的步态自适应控制系统,包括角度传感器、信号处理单元、动作产生器和运动控制器;角度传感器用于检测正常腿侧的角度θa,信号处理单元用于根据角度θa得到当前的步幅信息θ
st
、步速信息ωs和下个步态预设动作,动作产生器用于根据下个步态预设动作以及当前步幅信息θ
st
和步速信息ωs,得到下个步态的动作曲线,运动控制器用于根据下个步态的动作曲线,控制患腿侧的动作。本发明的控制系统,用于执行如上所述的控制方法,同样具有如上所述的优点。
[0028]
在一具体实施例中,角度传感器包括但不限于磁编码角度传感器、电阻式角度传感器、mpu姿态传感器、位置传感器和摄像头。其中角度传感器安装于正常腿的磁编码关节处。
[0029]
在一具体实施例中,还包括用于触发患腿侧自动运动的触发传感器。其中触发传感器包括但不限于拉压力传感器、薄膜压力传感器、力矩传感器和位置接触传感器。患腿侧有一个额外的挡板,连接上述触发传感器。通过添加动作触发传感器,实现脱离按键控制,但是又有着自主触发的稳定性,同时是因为在步态中使用,可以取得类似于人体动作轨迹跟踪的效果,动作协调性好。
[0030]
本发明实施例还公开了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在被处理器运行时执行如上所述的用于偏瘫患者的步态自适应控制方法的步骤。本发明实施例进一步公开了一种计算机设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述计算机程序在被处理器运行时执行如上所述的用于偏瘫患者的步态自
适应控制方法的步骤。
[0031]
本发明实现上述实施例方法中的全部或部分流程,也可以通过计算机程序来指令相关的硬件来完成,计算机程序可存储于一个计算机可读存储介质中,该计算机程序在被处理器执行时,可实现上述各个方法实施例的步骤。其中,计算机程序包括计算机程序代码,计算机程序代码可以为源代码形式、对象代码形式、可执行文件或某些中间形式等。计算机可读介质可以包括:能够携带计算机程序代码的任何实体或装置、记录介质、u盘、移动硬盘、磁碟、光盘、计算机存储器、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、电载波信号、电信信号以及软件分发介质等。存储器可用于存储计算机程序和/或模块,处理器通过运行或执行存储在存储器内的计算机程序和/或模块,以及调用存储在存储器内的数据,实现各种功能。存储器可以包括高速随机存取存储器,还可以包括非易失性存储器,例如硬盘、内存、插接式硬盘,智能存储卡(smart media card,smc),安全数字(secure digital,sd)卡,闪存卡(flash card)、至少一个磁盘存储器件、闪存器件、或其它易失性固态存储器件等。
[0032]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。