技术特征:
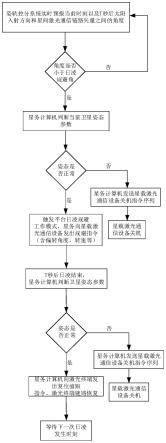
1.一种星载激光通信设备在轨自主规避日凌的方法,其特征在于,包括:s10:星间激光通信链路建立后,姿轨控分系统预报当前时刻以及t秒后的星间激光通信链路矢量和太阳入射矢量;s20:姿轨控分系统根据所述星间激光通信链路矢量预报当前时刻以及t秒后的太阳入射矢量与星间激光通信链路矢量之间的夹角是否小于日凌规避角;若t秒后的夹角小于日凌规避角,则t秒后会发生日凌,由姿轨控分系统计算出星载激光通信设备应进行规避偏转的伺服方位角增量和伺服俯仰角增量并发送至所述星务分系统,跳转至s30;若夹角大于日凌规避角,则返回执行步骤s10;s30:所述星务分系统首先判断卫星姿态参数是否正常,若卫星姿态参数异常,则向星载激光通信设备发送关机指令序列,星载激光通信设备关机,流程结束;若卫星姿态参数正常,则向星载激光通信设备发出含有伺服方位角增量、伺服俯仰角增量、规避转动速度的规避指令并跳转至s40;s40:星载激光通信设备依照所述规避指令进行规避机动,规避动作持续t秒;规避期间,星间激光通信链路断开。2.根据权利要求1所述的方法,其特征在于,所述方法还包括:s50:激光链路断开后,由所述姿轨控分系统持续预报当前时刻以及t秒后的星间激光通信链路矢量和太阳入射矢量;s60:根据s50中得到的星间激光通信链路矢量,姿轨控分系统预报当前时刻以及t秒后的太阳入射矢量与星间激光通信链路矢量之间的夹角是否小于日凌规避角,若t秒后的太阳入射矢量与星间激光通信链路矢量之间的夹角大于日凌规避角,则在t秒后日凌结束,跳转至s70;s70:所述姿轨控分系统根据s50中预报的t秒后的星间激光通信链路矢量给出复位捕跟重新建链的偏转角度以及偏转转速,并发送至所述星务分系统;s80:星务分系统首先判断卫星姿态参数是否正常,若卫星姿态参数异常,则星务计算机发送星载激光通信设备关机指令序列,星载激光通信设备关机,流程结束;若卫星姿态参数正常,则向所述星载激光通信设备发出复位捕跟指令,星载激光通信设备进行复位机动,复位机动时间持续t秒;与对方卫星的星载激光通信设备重新建立激光通信链路,并跳转至步骤s10。3.根据权利要求2所述的方法,其特征在于,所述复位捕跟指令包括复位捕跟重新建链的偏转角度以及偏转转速。4.根据权利要求1所述的方法,其特征在于,s10包括:星间激光通信链路建立后,所述星间激光通信链路的a星的姿态控制分系统持续计算本星当前位置并递推本星t秒之后的位置;b星的姿态控制分系统也持续计算本星当前位置并递推t秒之后的位置;a星与b星通过所述星间激光通信链路互发各自当前位置及t秒之后的位置信息;在此基础上,a星的姿态控制分系统收到b星的位置后递推一秒后b星的位置;b星的姿态控制分系统收到a星的位置并递推1秒a星的位置;求星间链路传来的对方卫星位置与本星姿轨控分系统计算的对方星位置之间的差值x:若x小于预设误差阈值,采用星链传来的
对方星的位置作为对方星当前时刻的位置;若x大于预设误差阈值,采用本星姿轨控分系统提供的对方卫星当前时刻的位置;姿轨控分系统根据a星和b星当前时刻以及t秒后的位置预报星间激光通信链路矢量和太阳入射矢量。5.根据权利要求2所述的方法,其特征在于,s50包括:在星间激光通信链路断开后,a星姿态控制分系统仍持续计算本星当前位置并递推本星t秒之后的位置;b星的姿态控制分系统也仍持续计算本星当前位置并递推t秒之后的位置;在此基础上,在星间激光通信链路断开后,a星的姿态控制分系统根据星间激光通信链路断开前收到的最后一个b星位置持续递推b星位置;b星根据星间激光通信链路断开前收到最后一个a星位置开始持续递推a星位置;姿轨控分系统预报根据a星和b星当前时刻以及t秒后的位置预报星间激光通信链路矢量。6.根据权利要求5所述的方法,其特征在于,直至星间激光通信链路重新建立,a星再次收到星间激光通信链路传来的b星位置时停止根据星间激光通信链路断开前收到的最后一个b星位置递推b星位置。7.根据权利要求5所述的方法,其特征在于,直至星间激光通信链路重新建立,b星再次收到星间激光通信链路传来的a星位置时停止根据星间激光通信链路断开前收到的最后一个a星位置递推a星位置。8.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-7任一项所述的方法。9.一种计算机存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一项所述的方法。
技术总结
本发明实施例公开一种星载激光通信设备在轨自主规避日凌的方法、设备及介质,该方法包括:S10:星间激光通信链路建立后,姿轨控分系统持续预报当前时刻以及T秒后的星间激光通信链路矢量和太阳入射矢量;S20:姿轨控分系统持续计算T秒后的太阳入射矢量与星间激光通信链路矢量之间的夹角是否小于日凌规避角;若T秒后的夹角小于日凌规避角,则由姿轨控分系统计算出星载激光通信设备应进行规避偏转的伺服方位角增量和伺服俯仰角增量并发送至星务分系统;S30:星务分系统向星载激光通信设备发出含有伺服方位角增量、伺服俯仰角增量、规避转动速度的规避指令;S40:星载激光通信设备依照规避指令进行规避机动,星间激光通信链路断开。开。开。
技术研发人员:康国栋 郑科宇 王文福 易钰驰 王崇 雷亚珂 李海昊 张安强 郭聪 乔元哲 王明涛 徐良
受保护的技术使用者:航天科工空间工程发展有限公司
技术研发日:2022.01.20
技术公布日:2022/6/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。