1.本技术的实施例涉及乘波构型优化技术领域,尤其涉及一种气动力模型构建方法和飞行器物面压力评估方法。
背景技术:
2.目前能够捕捉钝前缘脱体激波影响的理论模型都是基于简单构型推导获得的,例如钝头平板、球头圆柱、钝锥等,还缺乏对乘波体这种复杂构型物面压力分布影响的高效高保真度的气动力模型,也就无法借助气动力模型开展高效高保真度的乘波构型优化。
技术实现要素:
3.本技术的实施例提供了一种气动力模型构建方法和飞行器物面压力评估方法,能够对乘波体这种复杂构型物面压力分布影响进行分析。
4.在本技术的第一方面,提供了一种气动力模型构建方法,包括:
5.将钝前缘乘波体简化为变后掠钝化平板;
6.将影响所述变后掠钝化平板对称面型线的压力增量作为符号回归的目标变量,将影响所述变后掠钝化平板表面压力的物理参数作为符号回归的特征变量,构建如下公式:
7.δp/p
∞
=f(x/r,ma,α,λ)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1);
8.基于半圆柱表面压力近似公式、球头圆柱表面压力公式和球头钝锥表面压力近似公式,确定待选符号集;
9.基于cfd数值模拟构建所述变后掠钝化平板的物面压力增量的训练样本集;
10.基于符号回归算法,根据所述待选符号集、所述训练样本集和所述物理参数,优化公式(1)得到气动力模型:
[0011][0012]
其中,δp为压力增量,p
∞
为来流压力,x为物面沿流向距离头部顶点的距离,r为钝化半径,ma为马赫数,α为攻角,λ为当地前缘后掠角;
[0013]
其中,所述物理参数包括来流压力、物面沿流向距离头部顶点的距离、钝化半径、马赫数、攻角以及当地前缘后掠角。
[0014]
在一种可能的实现方式中,所述将钝前缘乘波体简化为变后掠钝化平板包括:
[0015]
将所述钝前缘乘波体的下表面流线简化为直线,将所述钝前缘乘波体的原始物面的三维问题转化为纵向截面的二维气动力建模问题,以将所述钝前缘乘波体简化为所述变后掠钝化平板。
[0016]
在一种可能的实现方式中,所述基于半圆柱表面压力近似公式、球头圆柱表面压力公式和球头钝锥表面压力近似公式,确定待选符号集包括:
[0017]
所述半圆柱表面压力近似公式表示如下:
[0018]
[0019]
所述球头圆柱表面压力近似公式表示如下:
[0020][0021]
其中,p为物面压力,p
∞
为自由来流压力,ma
∞
为自由来流马赫数,c为阻力系数,x为物面沿流向距离头部顶点的距离,d为钝前缘的直径;
[0022]
所述球头钝锥表面压力近似公式表示如下
[0023]
p=p
c-(p
c-p2)e-η
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0024]
其中,
[0025]
基于公式(3)、公式(4)和公式(5),确定运算符号“ ”、
“‑”
、
“×”
、
“÷”
、“exp”、“sin”以及“cos”作为所述待选符号集。
[0026]
在一种可能的实现方式中,所述基于cfd数值模拟构建所述变后掠钝化平板的物面压力增量的训练样本集包括:
[0027]
基于所述变后掠钝化平板,构建一个尖前缘平板模型和一个钝前缘平板模型;
[0028]
分别在所述尖前缘平板模型和所述钝前缘平板模型上选取预设数量的纵向界面,其中,在所述尖前缘平板模型和所述钝前缘平板模型上选取所述纵向截面的位置相同;
[0029]
针对预设工况,通过cfd数值模拟获得所述钝前缘平板模型上每个截面的物面压力、所述尖前缘平板模型上每个截面的物面压力;
[0030]
采用相同位置处,所述钝前缘平板模型的物面压力减去所述尖前缘平板模型的物面压力,来获得不同所述纵向截面的压力增量来作为所述训练样本集。
[0031]
在一种可能的实现方式中,所述基于符号回归算法,根据所述待选符号集、所述训练样本集和所述物理参数,优化公式(1)得到气动力模型包括:
[0032]
在设计空间内随机选取第一预设数量的初始变量种群,将每个所述初始变量种群中每个个体的变量数限制为第二预设数量,在所述物理参数、所述待选符号集、幂指数和常数项中选择每个个体的自变量;
[0033]
针对每个个体,按照二叉树结构确定对应的公式;
[0034]
基于每个个体对应的公式,获得在所述预设工况下所有所述纵向截面处每个点的压力增量,并计算由计算得到的压力增量和所述训练样本集中的压力增量的均方根误差;
[0035]
基于所述均方根误差对所述初始变量种群进行降序排序,并根据排序序号的比例确定个体适应度;
[0036]
判断是否为最后一代;
[0037]
若是,则优化结束,得到所述气动力模型。
[0038]
在一种可能的实现方式中,所述基于符号回归算法,根据所述待选符号集、所述训练样本集和所述物理参数,优化公式(1)得到气动力模型还包括:
[0039]
若否,则采用轮盘赌的方法根据适应度选出繁衍后的个体;
[0040]
根据预设交叉概率确定交叉个体的数量并随机选择交叉个体;
[0041]
对所选个体相应控制变量交叉,并遵循预设基因突变概率完成基因突变;
[0042]
生成新的种群再次进行优化。
[0043]
在一种可能的实现方式中,所述计算由计算得到的压力增量和所述训练样本集中
的压力增量的均方根误差包括:
[0044]
采用下式计算所述均方根误差:
[0045][0046]
其中,rmsei为均方根误差,m为所有压力增量样本点的数量,y(x)为训练样本点对应x位置的压力增量值,为每个公式对应x位置的压力增量结果。
[0047]
在一种可能的实现方式中,所述根据排序序号的比例确定个体适应度包括:
[0048]
采用下式确定所述适应度:
[0049][0050]
其中,fitnessi为适应度,rank为排序序号。
[0051]
在本技术第二方面,提供了一种飞行器物面压力评估方法,包括采用如第一方面中任一项所述气动力模型构建方法构建的气动力模型来对飞行器物面压力分布进行评估。
[0052]
在本技术实施例提供的气动力模型构建方法和飞行器物面压力评估方法中,构建的气动力模型能够快速、有效评估高超声速条件下脱体激波对高超声速飞行器物面压力分布的影响。
[0053]
应当理解,发明内容部分中所描述的内容并非旨在限定本技术的实施例的关键或重要特征,亦非用于限制本技术的范围。本技术的其它特征将通过以下的描述变得容易理解。
附图说明
[0054]
结合附图并参考以下详细说明,本技术各实施例的上述和其他特征、优点及方面将变得更加明显。在附图中,相同或相似的附图标记表示相同或相似的元素,其中:
[0055]
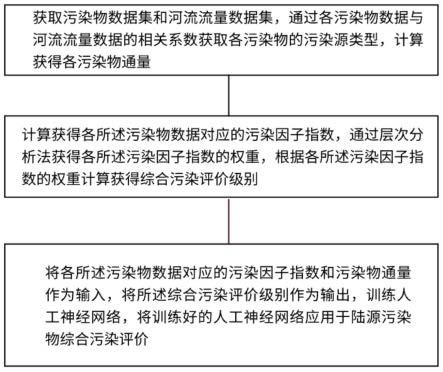
图1示出了根据本技术的实施例的气动力模型构建方法的流程图。
[0056]
图2示出了根据本技术的实施例的尖前缘乘波体钝化过程示意图。
[0057]
图3示出了根据本技术的实施例的乘波体对称面型线的示意图。
[0058]
图4示出了根据本技术的实施例的变后掠平板及其截面后掠角分布示意图。
[0059]
图5示出了根据本技术的实施例的变后掠平板模型截面位置选取示意图。
[0060]
图6示出了根据本技术的实施例的乘波体验证模型示意图。
[0061]
图7示出了根据本技术的实施例的气动力模型公式与vfd压力增量对比示意图。
具体实施方式
[0062]
为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。
[0063]
升阻比的高低决定着高超声速飞行器的航程能否满足任务要求。在高超声速条件下,飞行器将遭受极大的摩阻和波阻,升阻比提升十分困难,会面临难以逾越的“升阻比屏
障”。
[0064]
目前,乘波体被认为是最有希望打破高超声速“升阻比屏障”的一种新型气动布局。乘波体构型以其较高的气动效率,在高超声速飞行器设计中有着广阔的应用前景。
[0065]
在实际工程应用中,为了满足热防护需求,需要对尖前缘乘波体进行前缘钝化处理。在高超声速条件下,钝前缘会产生脱体激波,脱体激波将显著改变乘波体的物面压力分布,进而影响乘波体的气动特性。
[0066]
目前能够捕捉钝前缘脱体激波影响的理论模型都是基于简单构型推导获得的,例如钝头平板、球头圆柱、钝锥等,还缺乏对乘波体这种复杂构型物面压力分布影响的高效高保真度的气动力模型,也就无法借助气动力模型开展高效高保真度的乘波构型优化。
[0067]
为解决上述问题,本技术实施例提供了一种气动力模型构建方法。图1示出了根据本技术的实施例的气动力模型构建方法的流程图。参见图1,该方法包括以下步骤:
[0068]
步骤101,将钝前缘乘波体简化为变后掠钝化平板。
[0069]
为了有效评估钝化乘波体表面压力分布,需要在理论中考虑乘波体前缘变后掠、界面上反和下反以及下表面型线非直线等因素。考虑到不同乘波体之间的差异,直接对钝前缘乘波体进行研究过于复杂,因此可以将研究对象进行简化。
[0070]
将钝前缘乘波体简化为变后掠钝化平板,可以将钝前缘乘波体的下表面流线简化为直线,将钝前缘乘波体的原始物面的三维问题转化为纵向截面的二维气动力建模问题,以将钝前缘乘波体简化为变后掠钝化平板。
[0071]
在对钝前缘乘波体进行简化之前,需要对原始尖前缘乘波体进行前缘钝化。具体地,参见图2,前缘钝化可以包括如下步骤:针对任一给定的原始尖前缘乘波体,假设前缘钝化半径为r;将尖前缘乘波体上表面上移2r距离;沿流向选取一定数量的截面,求每个截面与上下表面前缘线的交点,根据上下两个交点在当前截面上做半径为r的半圆弧;根据上下表面前缘线和各个截面的圆弧,通过网格曲面发生成钝前缘;重新生成底面,即可根据上表面、下表面、钝前缘和底面生成钝化后的乘波体实体,即钝前缘乘波体。
[0072]
步骤102,将影响变后掠钝化平板对称面型线的压力增量作为符号回归的目标变量,将影响变后掠钝化平板表面压力的物理参数作为符号回归的特征变量来构建公式,构造如下公式:
[0073]
δp/p
∞
=f(x/r,ma,α,λ)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0074]
其中,δp为压力增量,p
∞
为来流压力,x为物面沿流向距离头部顶点的距离,r为钝化半径,ma为马赫数,α为攻角,λ为当地前缘后掠角。
[0075]
图3所示乘波体对称面型线,其与直线之间的微笑差异导致压力分布的不同,若将直线上的压力分布的结果直接应用于乘波体,会导致气动力模型不能捕捉到乘波体型线的微小变化对气动性能的影响,在乘波体型线与直线差异较小的情况下,可认为钝化引起的两者压力增量差异较小,因此选择钝化引起的压力增量作为符号回归的目标变量。需要说明的是,图3中实线为原始型线,虚线为直线。
[0076]
影响变后掠钝化平板表面压力的物理参数包括钝化半径、马赫数、飞行高度、攻角及前缘线形状等。对于任一纵向截面,影响其压力分布的主要因素包括物面沿流向距离头部顶点的距离x、钝化半径r、马赫数ma、攻角α、当地前缘后掠角λ、来流压力p
∞
。因此,可将物面沿流向距离头部顶点的距离x、钝化半径r、马赫数ma、攻角α、当地前缘后掠角λ、来流
压力p
∞
作为符号回归的特征变量。
[0077]
步骤103,基于半圆柱表面压力近似公式、球头圆柱表面压力公式和球头钝锥表面压力近似公式,确定待选符号集。
[0078]
半圆柱表面压力近似公式表示如下:
[0079][0080]
球头圆柱表面压力近似公式表示如下:
[0081][0082]
其中,p为物面压力,p
∞
为自由来流压力,ma
∞
为自由来流马赫数,c为阻力系数,x为物面沿流向距离头部顶点的距离,d为钝前缘的直径。
[0083]
球头钝锥表面压力近似公式表示如下
[0084]
p=p
c-(p
c-p2)e-η
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0085]
其中,
[0086]
基于公式(3)、公式(4)和公式(5),确定运算符号“ ”、
“‑”
、
“×”
、
“÷”
、“exp”、“sin”以及“cos”作为待选符号集。
[0087]
步骤104,基于cfd数值模拟构建变后掠钝化平板的物面压力增量的训练样本集。
[0088]
首先,基于变后掠钝化平板,构建一个尖前缘平板模型和一个钝前缘平板模型。示例地,钝前缘平板模型的钝化半径为10mm,变后掠平板及其不同截面的前缘后掠角分布如图4所示。
[0089]
然后,分别在尖前缘平板模型和钝前缘平板模型上选取预设数量的纵向界面,需要说明的是,在尖前缘平板模型和钝前缘平板模型上选取纵向截面的位置相同。
[0090]
然后,针对预设工况,通过cfd数值模拟获得钝前缘平板模型上每个截面的物面压力、尖前缘平板模型上每个截面的物面压力。
[0091]
预设工况的工况参数如表1所示:
[0092]
表1 cfd仿真工况参数
[0093][0094]
最后,采用相同位置处,钝前缘平板模型的物面压力减去尖前缘平板模型的物面压力,来获得不同纵向截面的压力增量来作为训练样本集。示例地,纵向截面的选择方案如图5所示,即纵向截面对应的位置分别为z=0m、0.1m、0.2m、0.3m、0.4m、0.5m、0.6m。
[0095]
步骤105,基于符号回归算法,根据待选符号集、训练样本集和物理参数,优化公式(1)得到气动力模型:
[0096][0097]
其中,δp为压力增量,p
∞
为来流压力,x为物面沿流向距离头部顶点的距离,r为钝化半径,ma为马赫数,α为攻角,λ为当地前缘后掠角。
[0098]
具体地优化方法可以包括如下步骤:
[0099]
步骤1501,在设计空间内随机选取第一预设数量的初始变量种群,将每个所述初始变量种群中每个个体的变量数限制为第二预设数量,在物理参数、待选符号集、幂指数和常数项中选择每个个体的自变量。示例地,第一预设数量可以为20~30,第二预设数量可以为50。
[0100]
步骤1502,针对每个个体,按照二叉树结构确定对应的公式。
[0101]
步骤1503,基于每个个体对应的公式,获得在预设工况下所有纵向截面处每个点的压力增量,并计算由计算得到的压力增量和训练样本集中的压力增量的均方根误差。
[0102]
采用下式计算所述均方根误差:
[0103][0104]
其中,rmsei为均方根误差,m为所有压力增量样本点的数量,y(x)为训练样本点对应x位置的压力增量值,为每个公式对应x位置的压力增量结果。
[0105]
步骤1504,基于均方根误差对初始变量种群进行降序排序,并根据排序序号的比例确定个体适应度。
[0106]
采用下式确定所述适应度:
[0107][0108]
其中,fitnessi为适应度,rank为排序序号。
[0109]
步骤1505,判断是否为最后一代。
[0110]
步骤1506,若是,则优化结束,得到气动力模型。
[0111]
步骤1507,若否,则采用轮盘赌的方法根据适应度选出繁衍后的个体。
[0112]
步骤1508,根据预设交叉概率确定交叉个体的数量并随机选择交叉个体。
[0113]
步骤1509,对个体相应控制变量交叉,并遵循预设基因突变概率完成基因突变。
[0114]
步骤1510,返回步骤1502。
[0115]
下面结合一个具体的示例来对本技术实施例进一步说明。
[0116]
以图6所示的乘波体(总长4m)为例,分别通过cfd数值模拟和上述公式(2)获得不同飞行工况该乘波体钝化前后(钝化半径10mm)下表面不同截面的压力增量,其对比如图7所示,其中approximation表示公式获得的结果。
[0117]
从图7中可见,模型与cfd结果吻合较好,说明采用本技术实施例提供的气动力模型构建方法构建的气动力模型,能够有效评估前缘钝化效应对高超声速飞行器物面压力分布的影响。
[0118]
在另一方面,本技术还提供了一种飞行器物面压力评估方法,采用上述的气动力模型构建方法构建的气动力模型来对飞行器物面压力分布进行评估。
[0119]
以上所述仅是本技术的部分实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。