1.本发明属于印刷机械领域,尤其涉及一种卷筒纸折页机构砍刀臂破坏分析及结构优化方法。
背景技术:
2.卷筒纸折页机是卷筒纸印刷机联动线上一个不可或缺的单元,通过三角板对纸张进行第一次对折,并通过裁切滚筒、折页滚筒和出页滚筒的相互配合,把一整条纸带自动折成八开或十六开,大大提高了报纸或书刊印刷的速度。近年来,随着原材料成本及人力成本的不断提升,各印刷企业为了保证利润,对印刷速度的要求越来越高;但印刷速度的提高却带来了可靠性和稳定性的问题。例如,n160型印刷机组的刀式折页机构,在转速25000rph工况下工作稳定,但当转速提高到36000rph时,折页机构便会出现问题,砍刀臂的根部区域在很短的时间内就会发生破坏,严重影响了印刷企业的生产效益。
3.综上所述,如何找到卷筒纸折页机在提速到36000rph后砍刀臂发生破坏的原因,并提供一种砍刀臂的结构优化方法,使优化后的砍刀臂结构满足实际生产的要求,已经成为亟需解决的问题。
技术实现要素:
4.为了克服现有技术存在的一系列缺陷,本发明的目的在于针对上述问题,提供一种卷筒纸折页机构砍刀臂破坏分析及结构优化方法,其特征在于,包括以下步骤:
5.步骤s1,建立折页机构无运动副间隙的动力学数学模型,计算折页机构运动一个周期时砍刀臂各截面的应力;
6.步骤s2,利用ansys软件的瞬态动力学模块建立折页机构含运动副间隙的有限元动力学模型,提取折页机构运动一个周期时砍刀臂各截面的最大等效应力;
7.步骤s3,选定最小安全系数,将步骤s1和s2得到的砍刀臂各截面的应力值与砍刀臂材料的屈服强度进行比较,计算砍刀臂强度安全系数;如果某截面的安全系数小于选定的最小安全系数,需要对该截面进行相应的加厚或加宽;
8.步骤s4,当砍刀臂满足强度要求时,继续考查其刚度:
9.利用约束模态分析考察砍刀臂的振动,提取砍刀臂的固有频率和振型;
10.搭建振动测试系统,对砍刀臂车间作业下的实际振动情况进行测试,采集砍刀臂的垂向加速度;
11.利用功率谱分析方法获得砍刀臂振动信号的功率谱密度,即工作频率;
12.步骤s5,将步骤s4中砍刀臂的固有频率和工作频率进行比较,如果固有频率在工作频率的范围内会引起结构共振,则对砍刀臂结构进行拓扑优化;
13.步骤s6,对拓扑优化后的砍刀臂结构进行约束模态分析,提取砍刀臂固有频率再次与工作频率进行比较,如果仍有共振情况发生,则通过增加杆单元来改变砍刀臂的结构刚度,直到砍刀臂的固有频率与工作频率避开,无共振情况发生为止。
14.优选的,步骤s1具体包括以下步骤:
15.步骤s11,将折页机构简化成四杆机构,折页四杆机构的运动方程为:
[0016][0017]
上式对时间求二次导,得到加速度关系式为:
[0018][0019]
式中,l1为曲柄的长度;φ1为曲柄与机架的夹角;l2为连杆的长度;φ2为连杆与机架的夹角;φ3为摇杆与机架的夹角;ω1为曲柄的角速度,ω2为连杆的角速度,ω3为摇杆的角速度;α1为曲柄的角加速度,α2为连杆的角加速度,α3为摇杆的角加速度;
[0020]
步骤s12,对于摇杆进行受力分析,得动力学方程为:
[0021][0022]
摇杆的质心加速度矢量方程为:
[0023][0024]
式中,f
dx
和f
dy
是连杆对摇杆的作用力;f
dx
和f
dy
是机架对摇杆的作用力;m3是摇杆的质量;a
3x
和a
3y
是摇杆的质心加速度的分量;r3是摇杆质心到摇杆下顶点的距离;j是摇杆对其下顶点的转动惯量;
[0025]
步骤s13,砍刀臂某截面的应力为:
[0026][0027]
式中,σ为砍刀臂截面的应力;a为砍刀臂的截面面积;l为截面到刀体座的距离;y为形心高度,i为截面对形心轴的惯性矩;lm为砍刀臂截面以下部分的质心到刀体座的距离,m为砍刀臂截面以下部分的质量。
[0028]
优选的,步骤s2具体包括以下步骤:
[0029]
步骤s21,将折页机构的三维模型导入ansys软件中,从材料库设置材料属性并赋予至各个结构;
[0030]
步骤s22,设置各结构的接触类型;
[0031]
步骤s23,单元类型及网格划分:砍刀臂是薄壁结构,其厚度方向上的尺寸远小于在长度和宽度上的尺寸,因此采用shell181单元进行模拟分析,在geometry里插入commands,通过apdl命令来设定;其余部分采用solid186单元;以六面体网格为主,四面体网格填补的原则进行网格划分;
[0032]
s24,设置边界条件:施加系统重力,设置齿轮箱轴的转速,给底座设置固定支撑,为轴承位置设置弹性支撑,以表征齿轮箱轴的微小形变;
[0033]
s25,选择结构的变形和受力为观察对象进行求解。
[0034]
优选的,步骤s21中,材料类型为45#钢;
[0035]
步骤s22中,各结构的接触类型设置为:连杆与砍刀臂顶端通过20
×
42
×
22滚针轴承连接,砍刀臂底端与刀体座通过40
×
62
×
22滚针轴承连接,轴承与销轴之间均留有0.05mm间隙;轴承与销轴之间添加摩擦副frictional,用来模拟间隙,摩擦系数设为0.3;共添加21个固定副,3个摩擦副和4个旋转副。
[0036]
优选的,步骤s3中,选定的最小安全系数为1.3。
[0037]
优选的,步骤s4中,振动测试系统包括动态信号采集仪、加速度传感器、信号采集和分析软件、笔记本电脑、导线和接头。
[0038]
优选的,步骤s4具体包括以下步骤:
[0039]
步骤s41,在adams软件中建立折页机构的虚拟样机,砍刀臂顶端与连杆铰接,砍刀臂底端与刀体座铰接,在折页机构虚拟样机的后处理器中提取砍刀臂铰接处的受载,判断砍刀臂的自由度,作为约束模态分析的边界条件;
[0040]
步骤s42,约束模态分析中,选择block lanczos算法提取砍刀臂的前6阶固有频率和振型。
[0041]
优选的,步骤s5具体包括以下步骤:
[0042]
步骤s51,采用ansys软件的shape optimization模块进行拓扑优化,网格类型选择solid95,以六面体网格为主,四面体网格填补的原则进行网格划分;
[0043]
步骤s52,将减少材料的百分比设置为80%,以柔顺度为目标函数,体积为约束函数;
[0044]
步骤s53,将步骤s41中折页机构虚拟样机提取的砍刀臂铰接处的受载作为优化模型的输入条件,每隔一段时间间隔取一组受载数据进行优化计算,多次优化结果中保留材料的合集为最终的优化模型结构。
[0045]
优选的,步骤s6具体包括以下步骤:
[0046]
步骤s61,采用全斜腹杆式桁架结构对砍刀臂去除材料的部位进行填充;
[0047]
步骤s62,全斜腹杆式桁架结构的三角单元形状选择为等边三角形,以三角单元的杆宽和杆厚作为试验因素,以砍刀臂的前6阶模态固有频率作为评价指标,进行2因素多水平的试验,得到最优的三角单元杆宽和杆厚,使砍刀臂的固有频率与工作频率避开。
[0048]
与现有技术相比,本发明具备以下有益效果:
[0049]
1)本发明中,通过分别建立折页机构无运动副间隙的动力学数学模型和含运动副间隙的有限元动力学模型来考察砍刀臂的强度,使校核结果更准确;
[0050]
2)本发明中,通过建立折页机构的虚拟样机得到砍刀臂的自由度,以砍刀臂的实际约束情况作为边界条件,进行了砍刀臂的约束模态分析,使计算结果更符合实际;
[0051]
3)本发明中,通过桁架结构来填充拓扑优化的去除材料,不但保证了砍刀臂的强度,而且通过改变桁架三角单元的杆宽和杆厚来改变砍刀臂的结构刚度,以使砍刀臂的固有频率避开工作频率。
附图说明
[0052]
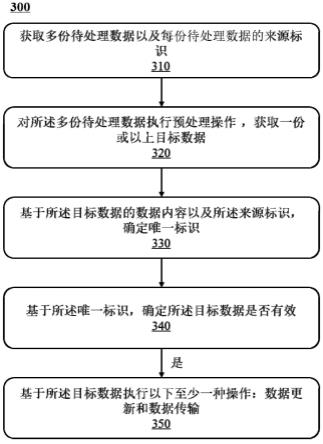
图1为本发明的方法流程图;
[0053]
图2为本发明的优选实施例中n160型刀式折页四杆机构的示意图;
[0054]
图3为本发明的优选实施例中n160型刀式折页四杆机构砍刀臂的结构图;
[0055]
图4为本发明的优选实施例中折页四杆机构从动件的角速度;
[0056]
图5为本发明的优选实施例中折页四杆机构从动件的角加速度;
[0057]
图6为本发明的优选实施例中曲柄转速25000rph时砍刀臂受力;
[0058]
图7为本发明的优选实施例中曲柄转速36000rph砍刀臂受力;
[0059]
图8为本发明的优选实施例中砍刀臂顶端的受载;
[0060]
图9为本发明的优选实施例中砍刀臂底端的受载;
[0061]
图10为本发明的优选实施例中砍刀臂根部振动信号;
[0062]
图11为本发明的优选实施例中砍刀臂根部振动信号的功率谱密度;
[0063]
图12为本发明的优选实施例中双臂中空结构砍刀臂;
[0064]
图13为本发明的优选实施例中全斜腹杆式桁架结构砍刀臂。
具体实施方式
[0065]
为使本发明实施的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本发明一部分实施例,而不是全部的实施例。
[0066]
基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0067]
下面通过参考附图描述的实施例以及方位性的词语均是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0068]
下面结合附图,列举本发明的优选实施例,对本发明作进一步的详细说明。
[0069]
如图1所示,本发明实施例中,一种卷筒纸折页机构砍刀臂破坏分析及结构优化方法,包括以下步骤:
[0070]
步骤s1,建立折页机构无运动副间隙的动力学数学模型,计算折页机构运动一个周期时砍刀臂各截面的正应力;
[0071]
步骤s11,折页机构可以简化成四杆机构,折页四杆机构的运动方程为:
[0072][0073]
上式对时间求二次导,得到加速度关系式为:
[0074][0075]
式中,l1为曲柄的长度;φ1为曲柄与机架的夹角;l2为连杆的长度;φ2为连杆与机架的夹角;φ3为摇杆与机架的夹角;ω1为曲柄的角速度,ω2为连杆的角速度,ω3为摇杆的角速度;α1为曲柄的角加速度,α2为连杆的角加速度,α3为摇杆的角加速度。
[0076]
n160型刀式折页四杆机构的示意图如图2所示,其具体参数如表1所示,砍刀臂的结构图如图3所示。曲柄匀速转动,转速ω1分别为25000rph和36000rph;初始条件为:φ1=70
°
,φ2=0
°
,φ3=151
°
。编程对上式进行求解,可以得到从动件的角速度和角加速度如图4和图5所示。
[0077]
表1折页四杆机构参数
[0078][0079]
步骤s12,对于摇杆(砍刀臂)进行受力分析,得动力学方程为:
[0080][0081]
摇杆的质心加速度矢量方程为:
[0082][0083]
式中,f
dx
和f
dy
是连杆对摇杆的作用力;f
dx
和f
dy
是机架对摇杆的作用力;m3是摇杆的质量;a
3x
和a
3y
是摇杆的质心加速度的分量;r3是摇杆质心到摇杆下顶点的距离;j是摇杆对其下顶点的转动惯量。
[0084]
砍刀臂材料为45#钢,总质量m3=9.61kg;其质心到刀体座的距离r3=152.32mm;转动惯量j=m3·
l
32
/3=0.6kg
·
m2。
[0085]
联立上式进行求解,计算得到砍刀臂两端的受力如图6和图7所示。
[0086]
步骤s13,砍刀臂某截面的应力为:
[0087][0088]
式中,σ为砍刀臂截面的应力;a为砍刀臂的截面面积;l为截面到刀体座的距离;y为形心高度,i为截面对形心轴的惯性矩;lm为砍刀臂截面以下部分的质心到刀体座的距离,m为砍刀臂截面以下部分的质量。
[0089]
砍刀臂的最小横截面面积为9.3
×
10-4
m2,最大横截面面积为3.65
×
10-3
m2,对于这种变截面结构,我们利用creo软件的横截面质量属性功能可以很容易得到结构的质心位置及截面的面积、形心高度、惯性矩。利用上式计算得到,砍刀臂在转速25000rph工况下的最大应力为5.59mpa,砍刀臂在转速36000rph工况下的最大应力为11.90mpa,均位于砍刀臂的弯折处;砍刀臂根部区域两工况下的最大应力分别为3.65mpa和8.03mpa。理论计算结果发现:砍刀臂所受应力远小于材料的屈服强度,可以判断砍刀臂根部的破坏并非由受力问题引起的,砍刀臂结构具有足够的强度。
[0090]
步骤s2,利用ansys软件的瞬态动力学模块建立折页机构含运动副间隙的有限元
动力学模型,提取折页机构运动一个周期时砍刀臂各截面的最大等效应力,具体步骤包括:
[0091]
s21,将折页机构的三维模型以x-t格式导入ansys软件中,从材料库设置材料属性并赋予至各个结构,材料类型为45#钢。
[0092]
s22,设置各结构的接触类型。连杆与砍刀臂顶端通过20
×
42
×
22滚针轴承连接,砍刀臂底端与刀体座通过40
×
62
×
22滚针轴承连接,轴承与销轴之间均留有0.05mm间隙;轴承与销轴之间添加摩擦副frictional,它可以用来模拟间隙,摩擦系数设为0.3。共添加21个固定副,3个摩擦副和4个旋转副。
[0093]
s23,单元类型及网格划分。砍刀臂是薄壁结构,厚度为8mm,其厚度方向上的尺寸远小于在长度和宽度上的尺寸,因此采用shell181单元进行模拟分析,在geometry里插入commands,通过apdl命令来设定;其余部分采用solid186单元;以六面体网格为主,四面体网格填补的原则进行网格划分,最小单元尺寸为1mm。
[0094]
s24,设置边界条件。施加系统重力,设置齿轮箱轴的转速,给底座设置固定支撑,为轴承位置设置弹性支撑,以表征齿轮箱轴的微小形变。
[0095]
s25,选择结构的变形和受力为观察对象进行求解。
[0096]
折页机构有限元动力学分析结果显示:最大等效应力出现在砍刀臂的弯折处,25000rph转速下砍刀臂的最大等效应力为5.94mpa,36000rph转速下砍刀臂的最大等效应力为12.71mpa;当齿轮箱输出轴转速由25000rph提升到36000rph时,折页机构在转速提升后各结构变形均有明显的增加,但变形量总体较小;应力水平也有明显增加,但最大等效应力均在15mpa以内,远小于材料的屈服强度。有限元动力学结果表明,折页机构含微小运动副间隙时,砍刀臂结构仍然具有足够的强度。
[0097]
步骤s3,最小安全系数取1.3,将步骤s1和s2得到的砍刀臂各截面的应力值与砍刀臂材料的屈服强度进行比较,计算砍刀臂强度安全系数;如果某截面的安全系数小于1.3,需要对该截面进行相应的加厚或加宽。
[0098]
本实施例中,步骤s1和s2得到的砍刀臂各截面的应力值均远小于材料的屈服强度355mpa,砍刀臂的强度安全系数均远大于1.3,因此无需对砍刀臂截面进行加厚或加宽。
[0099]
步骤s4,当砍刀臂满足强度要求,能够承受一定的力外,还要有刚度要求。利用约束模态分析考察砍刀臂的振动,提取砍刀臂的固有频率和振型。搭建振动测试系统,对砍刀臂车间作业下的实际振动情况进行测试,采集砍刀臂的垂向加速度;利用功率谱分析方法获得砍刀臂振动信号的功率谱密度,即工作频率。具体步骤包括:
[0100]
s41,在adams软件中建立折页机构的虚拟样机,砍刀臂顶端与连杆铰接,砍刀臂底端与刀体座铰接,在折页机构虚拟样机的后处理器中提取砍刀臂铰接处的受载,判断砍刀臂的自由度,作为约束模态分析的边界条件。
[0101]
将折页机构三维模型以x-t格式导入adams中,设置材料属性(steel),添加约束(共添加21个固定副,4个旋转副)、运动副摩擦和重力,添加驱动(飞轮的转速为36000rph),选择步长1000步,时间0.1s(砍刀臂运动一个周期)进行仿真分析。砍刀臂顶端与连杆铰接,砍刀臂底端与刀体座铰接,在折页机构虚拟样机的后处理器中提取砍刀臂铰接处的受载,如图8和图9所示。砍刀臂顶端和底端均受到x、y、z轴三个方向的力和沿x轴、y轴方向的转矩,没有沿z轴方向的转矩;因此,砍刀臂有沿x、y、z轴的移动自由度,沿y、z轴的转动自由度,没有沿z轴的转动自由度。
[0102]
s42,约束模态分析中,选择block lanczos算法提取砍刀臂的前6阶固有频率和振型,具体如表2所示。
[0103]
表2砍刀臂前6阶固有频率值及振型描述
[0104][0105]
s43,振动测试系统包括:动态信号采集仪、加速度传感器、信号采集和分析软件、笔记本电脑、导线及接头。
[0106]
本实施例中,振动试验采用测试仪器为:inv3020动态信号采集仪一台,采用全屏蔽机箱,具有较好的抗干扰能力,内置嵌入式电脑模块和硬盘存储;inv9824加速度传感器1个,频率范围为1~15khz,灵敏度5mv/g;多通道信号采集和实时分析软件dasp v11一套,可以方便的对采集数据进行分析和处理;笔记本电脑一台;m5-bnc导线及bnc-bnc接头若干。
[0107]
试验对象为n160型印刷机组的折页机构,试验工况为:(一)折页机构转速25000rph;(二)折页机构转速36000rph。待折页机构运行平稳后开始数据采集,采样频率为10khz,每次采集30秒数据。试验采集到的折页机构砍刀臂根部区域两种工况下的振动时域信号如图10所示。对于图10中的振动信号,功率谱分析方法能较好的突出频谱中的主频成分,为研究振动信号中对砍刀臂振动特性影响较大的低频振动,滤波200hz以上的高频干扰信号,获得振动信号的功率谱密度如图11所示。
[0108]
步骤s5,将步骤s4中砍刀臂的固有频率和工作频率进行比较,如果固有频率在工作频率的范围内会引起结构共振,需要对砍刀臂结构进行拓扑优化。具体步骤包括:
[0109]
s51,采用ansys软件的shape optimization模块进行拓扑优化,网格类型选择solid95,以六面体网格为主,四面体网格填补的原则进行网格划分。
[0110]
s52,将减少材料的百分比设置为80%,以柔顺度为目标函数,体积为约束函数。
[0111]
s53,将s41步骤中折页机构虚拟样机提取的砍刀臂铰接处的受载作为优化模型的输入条件,每隔一段时间间隔取一组受载数据进行优化计算,多次优化结果中保留材料的合集为最终的优化模型结构。
[0112]
在本实施例中,图8和9中砍刀臂的受载,每0.01s取一组数据作为优化分析的边界条件,共进行10次优化计算;10次结果去除材料的重叠部分即为优化模型需要去除材料的部分。根据拓扑优化结果对砍刀臂结构进行改进。砍刀臂侧面主要由上下两侧承受载荷,中间区域材料过盈,将这部分材料去除,臂厚仍为8mm;砍刀臂背面也是主要由两侧承受载荷,中间区域材料过盈,将这部分材料去除,变为双臂结构,每个臂的宽度为原来结构的1/3,即16mm;砍刀臂顶部需要保留现有的结构来安装刀片,底部的圆柱结构与刀体座的长轴通过
轴承连接,为了保证作业过程中的安全性和清洁性,保留这部分材料。改进后的双臂中空结构砍刀臂结构如图12所示,其质量为5.21kg,较原结构质量减小45.78%。
[0113]
步骤s6,对拓扑优化后的砍刀臂结构进行约束模态分析,提取砍刀臂固有频率再次与工作频率进行比较,如果仍有共振情况发生,则通过增加杆单元来改变砍刀臂的结构刚度,直到砍刀臂的固有频率与工作频率避开,无共振情况发生为止。具体步骤包括:
[0114]
对改进后的双臂中空结构砍刀臂进行约束模态计算,提取砍刀臂的前6阶固有频率及阵型,如表3所示。
[0115]
表3中空结构砍刀臂前6阶固有频率值及振型描述
[0116][0117]
由上表可知,改进后的双臂中空结构砍刀臂的各阶模态的固有频率有所减小,但仍远大于工况一下的工作主频;双臂中空结构砍刀臂的一阶固有频率接近工况二下的工作主频45.27hz,二阶固有频率接近工作主频135.83hz,结构依然会发生共振。对于砍刀臂这种跨度较大的长臂结构,我们可以采用桁架结构来适当增大刚度以避开工作主频。
[0118]
s61,采用全斜腹杆式桁架结构对砍刀臂去除材料的部位进行填充。将桁架结构置于砍刀臂中空部分竖直方向的对称中心面上,建立全斜腹杆式桁架结构的砍刀臂模型。
[0119]
s62,全斜腹杆式桁架三角单元形状选择为等边三角形,等边三角形的高度等于拓扑优化后的双臂结构中空部分的高度,值为26mm;每个臂的宽度为16mm,所以三角单元的杆宽不大于16mm;我们将杆宽等分为4水平,杆厚为杆宽的一半,等分为4水平,以砍刀臂的前6阶模态固有频率为评价指标,进行2因素4水平试验,以确定三角单元杆宽和杆厚的最佳参数。试验因素水平如表4所示。
[0120]
表4试验因素与水平
[0121][0122]
共进行16组约束模态分析试验,对比结果发现:当三角单元的杆厚为4mm,杆宽为8mm时,全斜腹杆式桁架结构砍刀臂的一阶固有频率为87.481hz,其共振区为65.61-109.35hz,避开了工况二下的工作主频45.27hz和135.83hz,二阶固有频率为424.29hz,也
远大于各工作主频,结构不会发生共振,且结构依然具有足够强度。最终确定的全斜腹杆式桁架结构砍刀臂三维模型如图13所示,其前6阶固有频率值及振型如表5所示。
[0123]
表5砍刀臂前6阶固有频率值及振型描述
[0124][0125]
对全斜腹杆式双臂桁架结构砍刀臂进行了初步的车间试验,折页机构在转速24000rph和36000rph两种工况下,砍刀臂运行平稳,未见异常。
[0126]
最后需要指出的是:以上实施例仅用以说明本发明的技术方案,而非对其限制。尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。