技术特征:
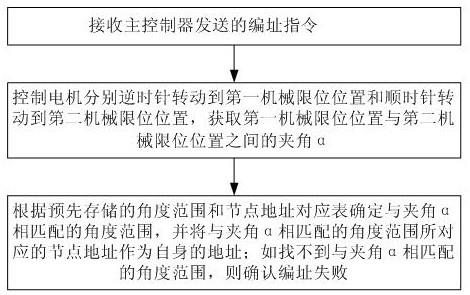
1.一种基于机械限位的从控制器自动编址方法,所述从控制器通过总线与主控制器通信连接,并与电机电连接,其特征在于,所述的基于机械限位的从控制器自动编址方法包括以下步骤:接收主控制器发送的编址指令;控制电机分别逆时针转动到第一机械限位位置和顺时针转动到第二机械限位位置,获取第一机械限位位置与第二机械限位位置之间的夹角α;根据预先存储的角度范围和节点地址对应表确定与夹角α相匹配的角度范围,并将与夹角α相匹配的角度范围所对应的节点地址作为自身的地址;如找不到与夹角α相匹配的角度范围,则确认编址失败。2.如权利要求1所述的从控制器自动编址方法,其特征在于,所述电机与一执行工件直接或间接相连,所述执行工件具有运动部件,所述运动部件在所述执行工件中具有预定的第一限位位置和预定的第二限位位置;当所述电机逆时针转动驱动所述运动部件运动至所述第一限位位置时,所述电机处于所述第一机械限位位置,当所述电机顺时针转动驱动所述运动部件运动至所述第二限位位置时,所述电机处于所述第二机械限位位置。3.如权利要求1所述的从控制器自动编址方法,其特征在于,所述电机与机械限位工装连接;其中,所述机械限位工装包括工装壳体和摆臂,所述摆臂的一端可转动地设置于所述工装壳体,并与所述电机的输出轴相连;所述工装壳体设有第一限位部和第二限位部,当电机驱动摆臂逆时针转动至与所述第一限位部相抵时,所述电机处于所述第一机械限位位置,当电机驱动摆臂顺时针转动至与所述第二限位部相抵时,所述电机处于所述第二机械限位位置。4.如权利要求1所述的从控制器自动编址方法,其特征在于,所述的控制电机分别逆时针转动到第一机械限位位置和顺时针转动到第二机械限位位置、获取第一机械限位位置与第二机械限位位置之间的夹角α具体包括:控制电机逆时针转动到第一机械限位位置,记录当前的电机转子角度a;控制电机顺时针转动到第二机械限位位置,记录当前的电机转子角度b;通过计算获得所述第一机械限位位置与所述第二机械限位位置之间的夹角α,α=|a-b|。5.如权利要求2所述的从控制器自动编址方法,其特征在于,所述的执行工件为车载部件,所述预定的第一限位位置和所述预定的第二限位位置由所述车载部件本身或所述车载部件的安装环境形成。6.如权利要求1所述的从控制器自动编址方法,其特征在于,所述从控制器与所述电机集成在一起。7.一种基于机械限位的从控制器自动编址方法,应用于通过总线通信连接的主控制器和多个从控制器,多个所述从控制器一一对应地分别与多个电机电连接,其特征在于,所述的从控制器自动编址方法包括以下步骤:各所述从控制器接收所述主控制器广播的自动编址指令;各所述从控制器控制对应的电机分别逆时针转动到第一机械限位位置和顺时针转动到第二机械限位位置,并获取第一机械限位位置与第二机械限位位置之间的夹角α;各所述从控制器根据预先存储的角度范围和节点地址对应表确定与夹角α相匹配的角
度范围,并将与夹角α相匹配的角度范围所对应的节点地址作为自身的地址;如找不到与夹角α相匹配的角度范围,则确认编址失败;其中,多个电机的第一机械限位位置与第二机械限位位置被设置成使多个从控制器所获取的第一机械限位位置与第二机械限位位置之间的夹角α分别处于不同的角度范围中,在所述的角度范围和节点地址对应表中,不同的角度范围对应不同的节点地址。8.如权利要求7所述的从控制器自动编址方法,其特征在于,各所述电机与一执行工件直接或间接相连,所述执行工件具有运动部件,所述运动部件在所述执行工件中具有预定的第一限位位置和预定的第二限位位置;当所述电机逆时针转动驱动所述运动部件运动至所述第一限位位置时,所述电机处于所述第一机械限位位置,当所述电机顺时针转动驱动所述运动部件运动至所述第二限位位置时,所述电机处于所述第二机械限位位置。9.如权利要求7所述的从控制器自动编址方法,其特征在于,各所述从控制器控制对应的电机分别逆时针转动到第一机械限位位置和顺时针转动到第二机械限位位置、获取第一机械限位位置与第二机械限位位置之间的夹角α具体包括:控制电机逆时针转动到第一机械限位位置,记录当前的电机转子角度a;控制电机顺时针转动到第二机械限位位置,记录当前的电机转子角度b;通过计算获得所述第一机械限位位置与所述第二机械限位位置之间的夹角α,α=|a-b|。10.如权利要求8所述的从控制器自动编址方法,其特征在于,所述的执行工件为工装,所述预定的第一限位位置和所述预定的第二限位位置由所述工装形成。11.如权利要求8所述的从控制器自动编址方法,其特征在于,所述的执行工件为车载部件,所述预定的第一限位位置和所述预定的第二限位位置由所述车载部件本身或所述车载部件的安装环境形成。
技术总结
一种基于机械限位的从控制器自动编址方法,从控制器通过总线与主控制器通信连接,并与电机电连接,该基于机械限位的从控制器自动编址方法包括以下步骤:接收主控制器发送的编址指令;控制电机分别逆时针转动到第一机械限位位置和顺时针转动到第二机械限位位置,获取第一机械限位位置与第二机械限位位置之间的夹角α;根据预先存储的角度范围和节点地址对应表确定与夹角α相匹配的角度范围,并将与夹角α相匹配的角度范围所对应的节点地址作为自身的地址;如找不到与夹角α相匹配的角度范围,则确认编址失败。本发明成本低,可靠性高,易于实现,编址效率高。编址效率高。编址效率高。
技术研发人员:徐俊超 叶航 田飞 唐杰
受保护的技术使用者:科博达技术股份有限公司
技术研发日:2022.03.02
技术公布日:2022/6/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。