1.本发明涉及三维点云测量技术领域,具体而言,涉及一种面向飞机整机测量数据的机身轮廓度分析方法。
背景技术:
2.飞机机体结构大多外形复杂,容易发生变形,而且这种变形在装配过程中还因外载荷动态变化,很难将机体结构的尺寸精度控制在较高水平。并且在飞机外形形变检测中,直接用初始测量点云经过曲面拟合处理一次生成符合要求的单张曲面非常困难,而且拟合生成的曲面的质量在光滑性和控制点数量上也不能满足要求。并且通常飞机点云数据具有尺寸大,数据海量的特点,若对所有点云数据通过全局拟合的方法提取截面,必将消耗大量计算时间,极大降低数据处理的效率。
技术实现要素:
3.针对现有技术中的不足,本发明提出了一种中轴曲线骨架驱动的飞机部件形变分析方法。针对现场飞机维护需求,对各部件形变分析的综合能力,提供更全面化、自动化的形变分析,提升预警能力。
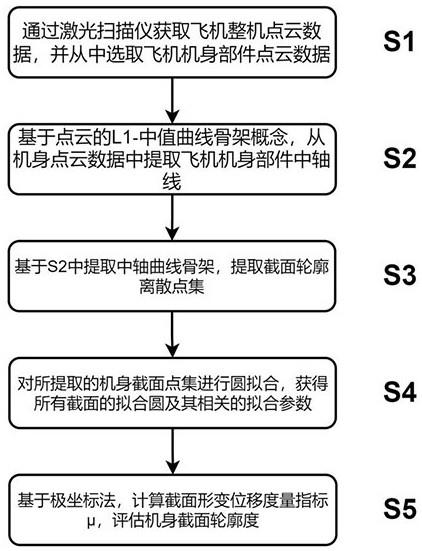
4.为实现上述目的,本发明采用以下技术方案:一种面向飞机整机测量数据的机身轮廓度分析方法,具体包括如下步骤:步骤s1、通过激光扫描仪获取飞机点云数据,并从飞机点云数据中选取飞机机身部件点云数据,设置飞机机身部件点云数据的机身包围框;步骤s2、以wlop局部投影算子为基础,基于点云的中值曲线骨架概念,从飞机机身部件点云数据中提取飞机机身部件中轴线;步骤s3、将提取的飞机机身部件中轴线均匀采样为多个骨架点,提取机身部件截面轮廓离散点集;步骤s4、对提取的机身部件截面轮廓离散点集进行圆拟合,获得所有截面切片的拟合圆及其参数;步骤s5、通过计算截面形变位移度量指标,评估机身截面轮廓度。
5.进一步地,步骤s2的具体实现过程如下:对飞机机身部件点云数据通过wlop局部投影算子进行平滑重采样;将平滑重采样后的飞机机身部件点云数据再基于点云的中值曲线骨架概念,使用带正则项的中值目标能量函数,提取不同尺度的l1中值骨架,得到飞机机身部件中轴线。
6.进一步地,所述目标能量函数l为:其中,表示飞机机身部件点云,表示飞机机身部件点云中点的索引,表示飞
机机身部件点云中第个点,i表示中值骨架上的点集合,表示中值骨架上的点索引,表示中值骨架上的第个点,是平衡参数,表示距离权重函数,表示中值骨架上除以外的点。
7.进一步地,步骤s3包括如下子步骤:步骤s301、以机身包围框长端对角线长度的2%为间距将飞机机身部件中轴线均匀采样为多个骨架点;步骤s302、在每个骨架点的前后侧各取一点,分别在三个点处垂直于飞机机身部件中轴线的平面形成截面切片;步骤s303、分别以该三个点为中心构建局部极坐标系,将三个局部极坐标系分别以对应点为中心,按照等角度进行点云搜索,提取机身部件截面轮廓离散点集。
8.进一步地,在等角度点云搜索过程中,若某一方向上未搜到飞机机身部件点云数据,则对该方向邻域内的飞机机身部件点云数据进行局部曲线拟合,内插出该方向对应的截面点坐标。
9.进一步地,步骤s4包括如下子步骤:步骤s401、对于任意一个截面切片,进行随机一致性采样算法ransac 的参数初始化,设置最大迭代次数w,并假设初始候选圆的得分和阈值;步骤s402、基于截面切片的采样点密度,计算截面切片内部每个点的采样概率;步骤s403、在一次拟合中,将随机一致性采样算法ransac中的随机采样替换成基于步骤s402中的采样概率进行采样,然后计算出与采样概率对应的候选圆参数,其中,表示候选圆上的一个点,表示候选圆上的另一个点,表示候选圆的半径;步骤 s404、统计在候选圆的阈值范围内的局内点集合中每个局内点的采样密度,将采样密度作为该候选圆的得分,其中,m为局内点的个数,e为局内点的索引,为局内点集合中第e个点的采样密度值;步骤 s405、若,则将赋值给,导出候选圆参数;步骤s406、若拟合次数,则继续重复上述步骤s403~ s405;若拟合次数,则获得所有截面切片的拟合圆及其参数。
10.进一步地,所述最大迭代次数w为:其中,n为每次采样的点数,为随机一致性采样算法ransac的置信度,p=0.9,q为当前候选圆采样密度与截面切片的比值。
11.进一步地,所述截面切片内部每个点的采样概率为:
,其中,表示截面切片内部第个点的采样概率,表示截面切片内部第k个点的采样密度,表示以第k个点为中心建立的局部邻域包含的点数,r为局部邻域l的半径,表示截面切片内部最大采样点密度,表示截面切片内部最小采样点密度。
12.进一步地,所述截面形变位移μ度量指标为:其中,表示拟合圆在投影平面上与极坐标系原点角度夹角为a的点,o是将截面切片与投影平面对齐后的坐标中心点,是发生形变后截面曲线角度a的点。
13.进一步地,所述形变后截面曲线表示拟合圆与原始飞机机身轮廓数据的形变曲线。
14.与现有技术相比,本发明的有益效果是:本发明面向飞机整机测量数据的机身轮廓度分析方法以局部截面轮廓截取与截面轮廓曲线拟合代替对飞机整体曲面拟合,不仅能避免全局拟合的庞大计算量,有效降低运算成本,同时还能以指定位置的局部点云数据为依据,对该位置进行曲线拟合,排除其他不相关数据对拟合区域的干扰,从而保证曲线拟合精度。
附图说明
15.图1为本发明的面向飞机整机测量数据的机身轮廓度分析方法流程图;图2为本发明中飞机机身部件点云数据图;图3为本发明中机身部件截面轮廓离散点集示意图;图4为根据本发明方法进行机身截面轮廓形变分析图。
具体实施方式
16.下面结合附图对本发明的技术方案作进一步地详细说明。
17.如图1为本发明的面向飞机整机测量数据的机身轮廓度分析方法流程图,该机身轮廓度分析方法具体包括如下步骤:步骤s1、通过激光扫描仪获取飞机点云数据,并从飞机点云数据中选取飞机机身部件点云数据,飞机机身部件点云数据如图2所示,并设置飞机机身部件点云数据的机身包围框。
18.步骤s2、以wlop局部投影算子为基础,基于点云的l1中值曲线骨架概念,从飞机机身部件点云数据中提取飞机机身部件中轴线;l1中值曲线骨架可表达飞机的整体走势,在截取截面轮廓时首先需要知道截取位置处机身的空间姿态信息,从而使切割平面与机身表面保持正交关系。具体地:对飞机机身部件点云数据通过wlop局部投影算子进行平滑重采样;将平滑重采样后的飞机机身部件点云数据再基于点云的l1中值曲线骨架概念,使用带正则项的l1中值目标能量函数,提取不同尺度的l1中值骨架,得到飞机机身部件中轴线。具
体地,通过不断扩大邻域的方法,先用较小邻域进行收缩,固定已经将骨架支点整齐排列成骨架分支,然后继续扩大邻域半径,找到一个新的分支,直到所有骨架点连接到骨架分支。本发明中涉及的目标能量函数l为:其中,表示飞机机身部件点云,表示飞机机身部件点云中点的索引,表示飞机机身部件点云中第j个点,i表示l1中值骨架上的点集合,i表示l1中值骨架上的点索引,xi表示l1中值骨架上的第i个点,是平衡参数,表示距离权重函数,i’表示中值骨架上除以外的点式中第一项是基于范式的对噪声、异常值和大面积数据缺失稳健的中值滤波项;第二项则是用于抵御点云分布影响的正则化项,可以调节投影点之间的排斥力。同时,借助圆拟合后处理来辅助增强l1中值骨架的中心性,从而得到飞机机身部件中轴线。相比引入广义旋转对称轴先验知识的曲线骨架提取方法rosa, l
1-中值曲线骨架对输入点云的质量以及所捕获形状的几何拓扑没有强烈要求,能更好地保持模型的拓扑结构;不需要进行复杂的法矢信息估计来补偿缺失的数据。该方法的关键之处是具有对异常值和噪声鲁棒性等突出的特性,并且能有效地处理非圆柱形结构。
19.步骤s3、将提取的飞机机身部件中轴线均匀采样为多个骨架点,提取机身部件截面轮廓离散点集,通过对机身部件中轴线的均匀采样,可以充分反应飞机机身全局的轮廓变化,方便后续对飞机机身整体位姿信息走势的提取和表达;具体包括如下子步骤:步骤s301、以机身包围框长端对角线长度的2%为间距将飞机机身部件中轴线均匀采样为多个骨架点;以对角线2%为间距均匀取样,不仅避免了过多采样点导致计算复杂度过高的情形发生,也兼顾了采样点的全局代表性。
20.步骤s302、在每个骨架点的前后侧各取一点,分别在三个点处垂直于飞机机身部件中轴线的平面形成截面切片,使得足够多的样本被采集,确保切割平面与机身表面保持正交关系;步骤s303、分别以该三个点为中心构建局部极坐标系,将三个局部极坐标系分别以对应点为中心,按照等角度进行点云搜索,提取机身部件截面轮廓离散点集。选取极坐标系等角度提取机身部件截面轮廓离散点集的优势在于方便对机身多角度均衡取样,体现机身全面轮廓度变化。
21.进一步地,在等角度点云搜索过程中,若某一方向上未搜到飞机机身部件点云数据,则对该方向邻域内的飞机机身部件点云数据进行局部曲线拟合,内插出该方向对应的截面点坐标。如图3给出了一个截面切片上提取的机身部件截面轮廓离散点集。
22.步骤s4、对提取的机身部件截面轮廓离散点集进行圆拟合,获得所有截面切片的拟合圆及其参数,该圆拟合过程具有速度快、效率高的特点,并且可以精确地反映机身的各向变形状态;具体包括如下子步骤:步骤s401、对于任意一个截面切片,进行随机一致性采样算法ransac 的参数初始化,设置最大迭代次数w,并假设初始候选圆的得分和阈值,本发明中最大迭代次数w为:
其中,n为每次采样的点数,p为随机一致性采样算法ransac的置信度,p=0.9,q为当前候选圆采样密度与截面切片的比值,通过设置阈值和最大迭代次数,在保证了算法结果的准确性同时,也将计算量控制在合理范围内。
23.步骤s402、基于截面切片的采样点密度,计算截面切片内部每个点的采样概率:,其中,表示截面切片内部第k个点的采样概率,表示截面切片内部第k个点的采样密度,表示以第个点为中心建立的局部邻域l包含的点数,为局部邻域l的半径,表示截面切片内部最大采样点密度,表示截面切片内部最小采样点密度。
24.步骤s403、在一次拟合中,将随机一致性采样算法ransac中的随机采样替换成基于步骤s402中的采样概率进行采样,并计算与采样概率对应的候选圆参数,其中,表示候选圆上的一个点,表示候选圆上的另一个点,表示候选圆的半径;在ransac 截面拟合过程中,对数据中每个点的采样概率是一致的,因此被称为随机采样统计算法。然而,在点云中由于噪声和离群点的存在,虽然ransac 算法仍然可以准基于点云深度学习的飞机外形形变检测关键技术研究确地拟合截面,但是耗时相对较长。考虑到机身点云中数据噪声和离群点周围的采样密度通常较低,而且往往以单个孤立点的形式存在,因此,本发明对ransac 进行了改进,通过计算每个点的采样密度值,将每个点的采样概率进行采样密度自适应加权,克服了ransac在对飞机外形形变检测中的上述缺点。
25.步骤 s404、统计在候选圆的阈值范围内的局内点集合中每个局内点的采样密度,将采样密度作为该候选圆的得分,其中,m为局内点的个数,e为局内点的索引,为局内点集合中第e个点的采样密度值;步骤 s405、若,则将赋值给,导出候选圆参数,通过对候选圆打分的方式,直观对候选拟合圆进行量化评价,不断迭代更加适合的拟合圆。
26.步骤s406、若拟合次数,则继续重复上述步骤s403~ s405;若拟合次数,则获得所有截面切片的拟合圆及其参数。
27.步骤s5、通过计算截面形变位移度量指标,评估机身截面轮廓度,本发明中截面形变位移μ度量指标为:其中,表示拟合圆在投影平面上与极坐标系原点角度夹角为a的点, 是将截面切片与投影平面对齐后的坐标中心点,是发生形变后截面曲线角度a的点,具体地,发生形变后截面曲线指:拟合圆与原始飞机机身轮廓数据的形变曲线。
28.步骤s502、分别使用不同曲线表示原始飞机机身轮廓、原始飞机机身扫描点云和拟合圆曲线,将机身整体的变形区域和机身在角度处的位移变化在图上表现出来,通过绘制每个截面在各个方位的变化量,用于直观地机身变形趋势分析,如图4,内部虚线曲线表
示原始飞机机身轮廓,虚实线表示原始飞机机身扫描点云,实曲线表示拟合圆曲线。实曲线与虚线曲线所夹部分为该飞机机身整体的变形区域,图4中在角度下,可以直观地看出该角度下拟合圆曲线与原始飞机机身轮廓的位移变化。通过将每个截面在各个方位的变化量绘制出来,可直观地用于由于在飞行过程中因经历重着陆等引起的过载现象,恶劣的飞行机动、更换大部件后受不均匀力的影响等造成的机身变形趋势分析,本发明通过将原始飞机机身轮廓与拟合圆曲线进行配准,通过对比从而计算出拟合误差,反映拟合结果与真实截面数据的差距,从而来评价飞机机身截面轮廓度,具有评价精度优的特点。
29.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施方式,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。