1.本发明涉及光伏板清洁装置技术领域,具体是指一种双轴式转向光伏板清扫机器人。
背景技术:
2.光伏板清扫机器人是一种用于实现对光伏板进行清扫的设备,现有技术中存在的光伏板清扫机器人只能实现一条直线上光伏板的清扫,当一排光伏板出现错位(上下错位、前后错位、倾角错位)时,现有光伏板机器人因不能随着光伏板转向而不能正常工作。.
3.因此,一种能够解决上述问题的机器人有待提出。
技术实现要素:
4.针对以上问题,本发明提出了一种能够针对光伏板进行清扫的机器人,其能够针对光伏板存在的前后、左右错位以及倾角错位问题进行高效清扫。
5.本发明提供的技术方案为:
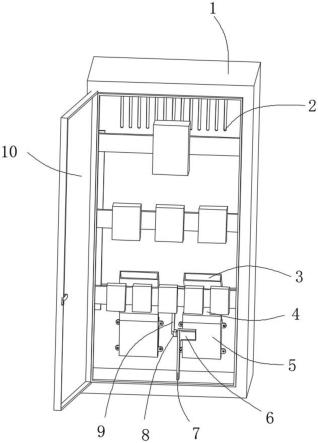
6.一种双轴式转向光伏板清扫机器人包括机头、机尾、连接二者的机体以及设于机体上的控制箱,其中:
7.所述机头和机尾均包括水平转向节、分布在水平转向节上有行走电机、与行走电机轴接的换向器、与换向器轴接的行走轮、挂轮。所述机头水平转向节连接有轴向转向节;所述机体内设有刷轴;所述机尾还包括一刷子电机,所述刷子电机与刷轴通过万向节连接;所述机体外部设有连接架连接有光伏板;所述控制箱与行走电机及刷子电机电信号连接。
8.进一步地,所述行走轮设为全向轮,所述机头还包括设于水平转向节上、并与机体内部连通的抽风风机;所述刷轴上螺旋缠绕有毛刷;所述机头、机尾均通过一固定架与机体分别连接。
9.进一步地,所述水平转向节通过水平转向轴与轴向转向节活动连接,所述轴向转向节通过转向节轴承与固定架连接,所述固定架上设有转动连接刷轴的刷轴轴承。
10.进一步地,所述刷子轴万向节穿过水平转向节;所述挂轮与行走轮的中心轴线相互垂直,所述挂轮的轮心方向与光伏电站光伏板相垂直。
11.进一步地,所述换向器通过固定在水平转向节上与行走轮以及挂轮轴接;所述毛刷上远离刷轴的一端穿出机体,并与光伏电站光伏板接触;
12.所述刷轴包括刷子轴母轴与刷子轴公轴,所述母轴与公轴之间设有刷子轴固定架,所述抽风机与刷轴所在空间连通。
13.进一步地,所述固定架上相对机头和机尾的一端设有u型卡槽,用于固定并调节毛刷距离光伏板的距离;所述固定架上穿设有供连接机体的螺钉;所述水平转向节两端均设有供行走电机卡接的滑槽,所述机体设为盒状。
14.进一步地,所述控制柜内设有一控制模块以及电源模块,所述控制模块与行走电机及刷子电机电信号连接,所述电源模块与行走电机及刷子电机电连接。
15.本发明与现有技术相比的优点在于:
16.通过提出一种带有机头、机尾以及连接二者的机体,并将机头和机尾设置成了通过换向器连接的挂轮以及行走轮,并且行走轮采用全向轮,实现了水平转向时的平顺性,且设置了水平转向节和轴向转向节,并将机尾设置成带有刷子电机以及通过万向节连接的刷轴,从而实现了方便清扫不同设置方式光伏板存在的问题,进而提高了本装置的实用性和功能性,从而能够灵活应用在不同的光伏板状态设置中,使用范围广,提高了清扫效率,继而提高了光伏电站的发电效率。
附图说明
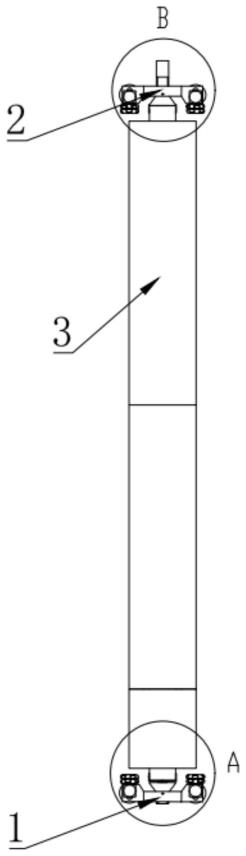
17.图1是本发明实施例的主视图;
18.图2是图1中的a部放大图;
19.图3是图1中的b部放大图;
20.图4是本发明实施例的侧视图;
21.图5是本发明实施例的底视图;
22.图6是图5中的e部放大图;
23.图7是图5中的h部放大图;
24.图8是本发明实施例的立体图;
25.图9是图8中的f部放大图;
26.图10是图8中的g部放大图;
27.图11是本发明实施例中的爆炸图;
28.图12是图11中的d部放大图;
29.图13是图11中的c部放大图;
30.图14是本发明实施例中换向器的结构图;
31.图15是本发明实施例中行走轮的结构图。
具体实施方式
32.下面结合附图1-15对本发明做进一步的详细说明。
33.一种双轴式转向光伏板清扫机器人,包括机头1、机尾2、连接二者的机体3、光伏板22以及设于机体3上的控制箱4,其中:
34.机头1和机尾2均包括水平转向节5、分布在水平转向节5上的行走电机6、与行走电机6轴接的换向器7;额外的,机头包括轴向转向节8;换向器7上连接有行走轮9和挂轮10;机尾2还包括一刷子电机13,刷子电机13与刷轴12通过万向节11连接;机体3外部设有光伏板连接架14与光伏板22连接,光伏板22用来给控制箱4供电;控制箱4与行走电机6及刷子电机13电信号连接。
35.轴向转向节8用于实现调节待清扫光伏板电站每排光伏板中两组光伏板之间存在的倾角错位问题,具体为:位于机头1上的轴向转向节8围绕固定架17的轴转动,实现轴向转动,继而解决了光伏电站光伏板存在的倾角错位问题。在这清扫过程中,通过刷子电机13带动万向节11,万向节11又带动刷轴12转动,刷轴12带动毛刷16运动,实现了清扫问题;并且,在具体实施的过程中,保证机头1或机尾2中的一个端实现轴向转动,从而实现一侧轴向转
动,继而达到了在清扫过程中既能实现轴向转动还能保证机体3稳定性的作用。
36.水平转向节5用于实现调节光伏板电站每排光伏板中两组光伏板之间存在的前后错位问题,具体为:水平转向节5在机头部分通过水平转向轴18与轴向转向节8活动连接,从而实现了水平转向;水平转向节5在机尾部分通过机尾转向轴25与机尾固定架17连接,固定架17上设有转动连接刷轴12的刷轴轴承20。
37.在实现水平转动的过程中,行走轮9会产生轴向位移,因此为了转向更加顺滑,将行走轮9设置成全向轮,继而将行走电机6产生的动力转化为行走位移动力的同时又能使转向顺滑,从而解决了光伏电站光伏板存在的前后错位问题。
38.再者,为了解决光伏电站每块光伏板存在的缝隙问题,在行走轮9和挂轮10之间设置一个90度的换向器7进行连接,行走电机6通过换向器7输出动力给行走轮9和挂轮10,行走轮9和挂轮10可以同时获得动力,从而解决了光伏电站每块光伏板之间间隙在1-2cm时卡顿的情况。
39.机头挂轮10贴合轨道行走,驱动水平转向节5围绕水平转向轴18转向,机尾挂轮10贴合轨道行走,驱动水平转向节5围绕位于机尾2位置的转向轴25转动,从而解决了现有技术中存在的光伏电站光伏板前后错位问题。
40.机头1还包括设于水平转向节5上、并与机体3内部连通的抽风机15;刷轴12上螺旋缠绕有毛刷16;机头1、机尾2均通过各自不同的固定架17与机体3分别连接。
41.通过设置的抽风机15,实现了收集在清扫过程中扬起的灰尘的功能。
42.挂轮10的轮心方向与光伏板22相垂直。
43.换向器7通过固定套23与行走轮9固定连接;毛刷16上远离刷轴12的一端穿出机体3,并与光伏电站光伏板接触;
44.刷轴12包括刷子轴母轴12.1与刷子轴公轴12.2,母轴12.1与公轴12.2之间设有刷子轴固定架24,抽风机15与刷轴12所在空间连通。
45.固定架17上相对机头1和机尾2的一端设有u型卡槽,用于固定并调节刷子距离光伏电站光伏板清扫的距离;固定架17上穿设有供连接机体3的螺钉;水平转向节5两端均设有供行走电机6卡接的滑槽,机体3设为盒状。
46.控制箱4内设有一控制模块以及电源模块,控制模块与行走电机6及刷子电机13电信号连接,电源模块与行走电机6及刷子电机13电连接。
47.以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。