1.本发明涉及牵引器检测技术领域,更具体地说,涉及一种牵引器全自动检测设备及检测方法。
背景技术:
2.牵引器是全自动洗衣机中控制排水阀开闭及刹车盘是否脱开的关键部件,因此牵引器质量是否合格对于整机质量的影响尤为重要。牵引器由钢绳、电磁铁、传动齿轮、齿条和同步电机等组成。牵引器的工作原理描述为:牵引器未接通电源时,洗衣机排水阀(负载)沿钢绳方向将钢绳拉到起始位置;牵引器接通电源时,驱动同步电机同时带动齿轮传动机构将钢绳往牵引器内部拉,该过程称为吸合过程,该过程对应洗衣机将排水阀打开过程;钢绳被拉到吸合位置时,牵引器内部机构改变,传动停止,此时状态称为保持状态,对应洗衣机排水阀全开状态;牵引器断电后,在排水阀的弹性力作用下,钢绳被拉回起始状态。
3.因应用场合对牵引器工作性能要求很高,因此生产过程必须对牵引器性能进行检测。现阶段,常用洗衣机牵引器检测装置为单工位一体机测试,检测效率低,而且检测不精确,不能满足生产节拍要求。当牵引器大批量生产时,需同时检测多个定时器时,不仅无法避免发生漏检的问题,致使功能失常的牵引器流入市场,而且检测效率低下,从而无法达到快速和检准的效果。
技术实现要素:
4.本发明的目的在于克服现有技术中的缺点与不足,提供一种牵引器全自动检测设备,该牵引器全自动检测设备可实现高效率、稳定快速对牵引器进行批量检测,并有效避免发生漏检及误检的情况,从而提高检测效率和检测准确性。本发明还提供一种快速、准确和可靠的牵引器全自动检测方法,从而有效保证牵引器的生产质量。
5.为了达到上述目的,本发明通过下述技术方案予以实现:一种牵引器全自动检测设备,其特征在于:包括:
6.若干个牵引器检测子模块,用于安装牵引器并与牵引器电气连接,并输出检测信号和检测数据;
7.控制电柜,用于提供牵引器检测子模块电源,接收牵引器检测子模块输出的检测信号和检测数据,对检测信号的接收时间进行计时,对计时时间和检测数据进行比较判断;
8.以及显示触摸屏,用于显示检测数据和检测状态,以及可检测操控;所述显示触摸屏设置在控制电柜上并与控制电柜连接;
9.每个所述牵引器检测子模块设置在控制电柜上,并控制电柜连接;
10.工作时,控制电柜控制安装在牵引器检测子模块上的牵引器通电和断电,并通过对牵引器检测子模块输出的检测信号和检测数据进行判断,实现对牵引器的工作性能、保持状态性能和回程性能进行检测。
11.在上述方案中,控制电柜可实现供电控制,并通过显示触摸屏实时监测若干个牵
引器的运行状态。该牵引器全自动检测设备可大大解决单工位检测导致检测效率低的问题,可实现快速、准确对牵引器的工作性能、保持状态性能和回程性能进行检测,而且可实现批量检测,适合批量检测,从而提高检测效率和检测准确性。
12.每个所述牵引器检测子模块包括固定座、滑动装置、模拟负载、绳轮座和用于检测滑动装置位置的传感器;所述固定座设置在控制电柜上,固定座设置有牵引器安装区域,滑动装置与固定座滑动连接并与牵引器安装区域相对;所述牵引器安装区域还设置有用于牵引器供电和便于控制电柜获取电参数的电源,电源与控制电柜连接;所述绳轮座设置在固定座上,模拟负载通过缠绕线绕设在绳轮座上并与滑动装置连接;所述传感器设置在固定座上并与控制电柜信号连接。
13.牵引器通电后可带动滑动装置滑动,传感器则可记录牵引器工作的起始位置,牵引器断电后在模拟负载重力作用下开始回程,传感器则可记录牵引器工作的回程位置,通过控制电柜对牵引器的动作时间和回复时间进行计时,以检测牵引器的性能。另外,模拟负载则可用于检测牵引器的工作牵引力。
14.所述牵引器检测子模块还包括用于检测牵引器工作行程的拉线式位移传感器;所述拉线式位移传感器与滑动装置连接,并与控制电柜信号连接。拉线式位移传感器可根据其自带钢绳的位移测量牵引器的实际工作行程。
15.所述滑动装置设置有用于与牵引器连接的牵引器连接组件;所述牵引器连接组件包括固定块和用于与牵引器连接的牵引杆,固定块设置在滑动装置上并与牵引杆可调节连接。牵引杆可根据检测需求调节其与牵引器的连接位置。
16.所述牵引杆与牵引器连接的端部设置有连接头;所述连接头设置有用于与牵引器拉绳端部卡设的卡槽。连接头的卡槽可对牵引器拉绳端部进行卡设固定,该方式方便牵引器在检测机构上的安装和拆卸。
17.所述滑动装置设置有与模拟负载连接的缠绕线固定块;所述模拟负载通过缠绕线绕设在绳轮座上并与缠绕线固定块连接。
18.所述传感器为光电传感器;传感器设置在滑动装置的侧部,滑动装置设置有挡片;滑动装置滑动时,传感器通过检测挡片以获取滑动装置的位置信息。
19.所述牵引器检测机构还包括用于限制滑动装置位置的限位装置;所述限位装置设置在固定板上并位于滑动装置远离牵引器安装区域的侧部;
20.所述限位装置包括限位座、限位杆和限位胶垫;所述限位座设置在固定板上,限位杆与限位座调节连接,限位胶垫设置在限位杆的端部并与滑动装置相对。限位杆可根据检测需求调节其对滑动装置的限制位置。
21.一种牵引器全自动检测方法,其特征在于:设置若干个与牵引器电气连接的牵引器检测子模块,牵引器检测子模块对牵引器进行检测信号和检测数据的采集;
22.当安装在牵引器检测子模块上的牵引器通电时,接收牵引器检测子模块输出的检测信号并对检测信号的接收时间进行计时,对计时时间和接收牵引器检测子模块输出的检测数据进行比较判断,实现对牵引器的工作性能进行检测;
23.当牵引器保持工作最大行程状态时,接收牵引器检测子模块输出的检测数据并进行比较判断,实现对牵引器的保持状态性能进行检测;
24.当安装在牵引器检测子模块上的牵引器断电时,开始计时,接收牵引器检测子模
块输出的检测信号则停止计时,对计时时间进行比较判断,实现对牵引器的回程性能进行检测。
25.每个牵引器检测子模块设置有传感器、模拟负载、拉线式位移传感器、与牵引器电气连接的电源以及与牵引器连接的滑动装置;所述模拟负载通过绳轮与滑动装置连接,拉线式位移传感器与滑动装置连接,传感器获取滑动装置的位置信息;设置有控制电柜;
26.牵引器全自动检测方法为:
27.当安装在牵引器检测子模块上的牵引器通电时,电源供电使得牵引器通电以带动连接有模拟负载的滑动装置滑动,以对牵引器的工作牵引力进行检测;控制电柜从电源处采集电流并判断以对牵引器的吸合电流进行检测;控制电柜接收拉线式位移传感器的检测数据并判断以对牵引器的实际工作行程进行检测;传感器获取牵引器工作的起始位置,并采用控制电柜对牵引器的动作时间进行计时,当牵引器工作行程达到预设值后,即满足工作行程,控制电柜停止对牵引器动作时间计时并比较判断以对牵引器的动作时间进行检测,实现对牵引器的工作性能进行检测;
28.当牵引器保持工作最大行程状态时,控制电柜从电源处采集电流并判断以对牵引器保持电流进行检测,实现对牵引器的保持状态性能进行检测;
29.当安装在牵引器检测子模块上的牵引器断电时,控制电源对牵引器断电,牵引器在模拟负载重力作用下开始回程,控制电柜对牵引器回复时间进行计时,当滑动装置触发传感器后停止计时并比较判断以对牵引器的回复时间进行检测,实现对牵引器的回程性能进行检测。
30.本发明的控制电柜设置有相互连接的plc控制器和电参数盘面表,本发明设计若干个牵引器检测工位,每个牵引器检测工位的牵引器检测子模块由控制电柜中的plc控制器控制并采集数据,电参数盘面表作电流数据收集并传送给plc控制器,拉线式传感器测量牵引器工作行程,同时plc控制器根据牵引器检测子模块上牵引器的动作信号对动作时间与回复时间进行计时,收集到上述数据后进行比较判断,实现对洗衣机牵引器的质量检测。
31.与现有技术相比,本发明具有如下优点与有益效果:
32.1、本发明牵引器全自动检测设备可实现高效率、稳定快速对牵引器进行批量检测,并有效避免发生漏检及误检的情况,从而提高检测效率和检测准确性。
33.2、本发明牵引器全自动检测方法快速、准确和可靠,从而有效保证牵引器的生产质量。
附图说明
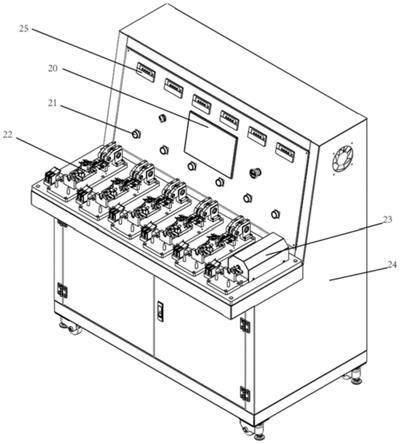
34.图1是本发明牵引器全自动检测设备的示意图;
35.图2是本发明牵引器检测子模块的示意图;
36.图3是本发明牵引器检测子模块的侧面示意图;
37.其中,1为固定座、2为砝码、3为绳轮座、4为光电传感器、5为滑板、6为轨道、7为拉线式位移传感器、8为定位板、9为定位柱、10为安装工位、11为电源、12为固定块、13为牵引杆、14为连接头、15为卡槽、16为缠绕线固定块、17为限位座、18为限位杆、19为挡片、20为显示触摸屏、21为检测启动按钮、22为牵引器检测子模块、23为防护罩、24为控制电柜、25为电参数盘面表。
具体实施方式
38.下面结合附图与具体实施方式对本发明作进一步详细的描述。
39.实施例
40.如图1至图3所示,牵引器全自动检测设备,其特征在于:包括:
41.六个牵引器检测子模块22,用于安装牵引器并与牵引器电气连接,并输出检测信号和检测数据;
42.控制电柜24,用于提供牵引器检测子模块22电源,接收牵引器检测子模块输出的检测信号和检测数据,对检测信号的接收时间进行计时,对计时时间和检测数据进行比较判断;
43.以及显示触摸屏20,用于显示检测数据和检测状态,以及可检测操控,该显示触摸屏20设置在控制电柜24上并与控制电柜24连接;
44.每个牵引器检测子模块22设置在控制电柜24上并控制电柜24连接,而且该设备针对每个牵引器检测子模块22都设置有防护罩23。而控制电柜24设置有plc控制器、电参数盘面表25、检测启动按钮21和变频电源,其中,变频电源与plc控制器连接,电参数盘面表25和检测启动按钮21均与plc控制器连接。工作时,控制电柜24控制安装在牵引器检测子模块22上的牵引器通电和断电,并通过对牵引器检测子模块22输出的检测信号和检测数据进行判断,实现对牵引器的工作性能、保持状态性能和回程性能进行检测。
45.每个牵引器检测子模块22包括固定座1、滑动装置、砝码2、绳轮座3和用于检测滑动装置位置的光电传感器4,其中,滑动装置包括滑板5和设置在固定座1上的轨道6,轨道6与滑板5滑动连接。固定座1上设置有牵引器安装区域,滑板5与牵引器安装区域相对。而绳轮座3设置在固定座1上,砝码2通过缠绕线绕设在绳轮座3上并与滑板5连接。光电传感器4设置在固定座1上,工作时,将牵引器安装区域固定的牵引器与滑板5连接,通过砝码2和光电传感器4对牵引器的性能进行检测。
46.该牵引器检测子模块22还包括用于检测牵引器工作行程的拉线式位移传感器7,该拉线式位移传感器7与滑板5连接并与控制电柜24的plc控制器连接。拉线式位移传感器7可根据其自带钢绳的位移测量牵引器的实际工作行程。
47.本发明的牵引器安装区域设置有定位板8和定位柱9,定位板8和定位柱9之间围成的空间作为牵引器的安装工位10。该牵引器安装区域还设置有用于牵引器供电和便于电参数盘面表25获取电参数的电源11,该电源11分别与牵引器、电参数盘面表25和plc控制器连接,电参数盘面表25可在电源11处获取电流信号数据,变频电源通过plc控制器对电源11供电。
48.本发明的滑动装置设置有用于与牵引器连接的牵引器连接组件,该牵引器连接组件包括固定块12和用于与牵引器连接的牵引杆13,其中,固定块12设置在滑板5上并与牵引杆13可调节连接。本发明牵引杆13可根据检测需求调节其与牵引器的连接位置。为了方便牵引器在检测机构上的安装和拆卸,牵引杆13与牵引器连接的端部设置有连接头14,该连接头14设置有用于与牵引器拉绳端部卡设的卡槽15。
49.本发明的滑板5设置有与砝码2连接的缠绕线固定块16,砝码2通过缠绕线绕设在绳轮座3上并与缠绕线固定块16连接。
50.本发明的光电传感器4设置在滑动装置的侧部,滑板5设置有挡片19,滑板5滑动
时,光电传感器4通过检测挡片19以获取滑板5的位置信息。
51.该牵引器检测子模块22还包括用于限制滑动装置位置的限位装置,该限位装置设置在固定板1上并位于滑动装置远离牵引器安装区域的侧部。该限位装置包括限位座17、限位杆18和限位胶垫,限位座17设置在固定板1上,限位杆18与限位座17调节连接,限位胶垫设置在限位杆18的端部并与滑板5相对,该限位胶垫用于与滑板5相抵。本发明的限位杆18可根据检测需求调节其对滑动装置的限制位置。
52.牵引器全自动检测方法为:
53.当安装在牵引器检测子模块22上的牵引器通电时,电源11供电使得牵引器通电以带动连接有砝码2的滑板5滑动,以对牵引器的工作牵引力进行检测;控制电柜24从电源11处采集电流并判断以对牵引器的吸合电流进行检测;控制电柜24接收拉线式位移传感器7的检测数据并判断以对牵引器的实际工作行程进行检测;光电传感器4获取牵引器工作的起始位置,并采用控制电柜24对牵引器的动作时间进行计时,当牵引器工作行程达到预设值后,即满足工作行程,控制电柜24停止对牵引器动作时间计时并比较判断以对牵引器的动作时间进行检测,实现对牵引器的工作性能进行检测;
54.当牵引器保持工作最大行程状态时,控制电柜24从电源11处采集电流并判断以对牵引器保持电流进行检测,实现对牵引器的保持状态性能进行检测;
55.当安装在牵引器检测子模块22上的牵引器断电时,控制电源11对牵引器断电,牵引器在砝码2重力作用下开始回程,控制电柜24对牵引器回复时间进行计时,当滑板5的挡片19触发光电传感器4后停止计时并比较判断以对牵引器的回复时间进行检测,实现对牵引器的回程性能进行检测。
56.上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。