技术特征:
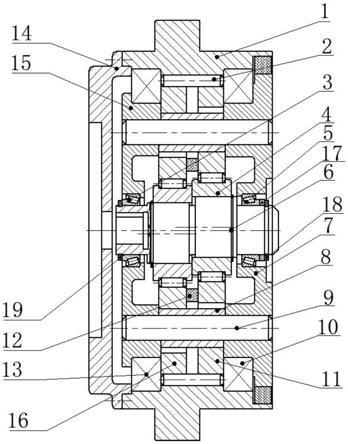
1.一种工业机器人rv简化减速器,其特征在于,包括:行星架、针齿壳(1)、双偏心轴(6)、无外圈滚子轴承(4)、第一摆线轮(11)、第二摆线轮(16)、隔圈(12)、第一主轴承(10)、第二主轴承(13)、第一锥轴承(3)、第二锥轴承(5)、针销(2)及连接在针齿壳(1)的止口的圆端盖(14),行星架由主圆盘(7)、副圆盘(15)、柱销(9)及销套(8)组成,柱销(9)的一端与主圆盘(7)上的均布的孔过盈配合,柱销(9)的另一端穿过在第一摆线轮(11)和第二摆线轮(16)上均布的柱销孔与副圆盘(15)的相应孔过渡配合,柱销(9)数为6或8或10或12,柱销(9)外有销套(8),柱销孔的直径=销套(8)的外径 2e,e为双偏心轴(6)的偏心距,行星架的两侧用第一主轴承(10)和第二主轴承(13)分别支承在针齿壳(1)的两侧内孔处,双偏心轴(6)的两侧用第一锥轴承(3)和第二锥轴承(5)分别支承在主圆盘(7)及副圆盘(15)的中心孔处,第一锥轴承(3)与第二锥轴承(5)的外圈背靠背地设于第一锥轴承(3)与第二锥轴承(5)的内圈的中间,第一锥轴承(3)的内圈外侧设有第一挡圈(19),第二锥轴承(5)的内圈外侧依次设有圆环调整片(17)及第二挡圈(18),双偏心轴(6)的偏心段与无外圈滚子轴承(4)的内孔过盈配合,而无外圈滚子轴承(4)的外圆与第一摆线轮(11)和第二摆线轮(16)的中心孔过渡配合,针销(2)装配在针齿壳(1)的均布的半圆槽中,第一摆线轮(11)和第二摆线轮(16)采用“正等距-正移距”组合修形,使得第一摆线轮(11)和第二摆线轮(16)的轮齿与针销(2)之间形成径向间隙δ
j
和侧向间隙δ
c
。2.根据权利要求1所述的工业机器人rv简化减速器,其特征在于,第一摆线轮(11)和第二摆线轮(16)采用最佳“正等距-正移距”组合修形,修形量计算公式如下:等距修形量δr
z
=δ
j
/(1-k),移距修形量δr
z
=kδr
z
,式中,k=(1-k
12
)
0.5
,短幅系数k1=ez
b
/r
z
,z
b
为针销数,r
z
为针齿中心圆半径。3.根据权利要求1所述的工业机器人rv简化减速器,其特征在于,双偏心轴(6)的两个偏心段的相位差不等于180
°
。4.根据权利要求3所述的工业机器人rv简化减速器,其特征在于,双偏心轴(6)的两个偏心段的相位差为178.5
°
~179.5
°
。5.根据权利要求4所述的工业机器人rv简化减速器,其特征在于,双偏心轴(6)的两个偏心段的相位差为178.8
°
~179.25
°
。6.根据权利要求5所述的工业机器人rv简化减速器,其特征在于,双偏心轴(6)的两个偏心段的相位差为179.0
°
~179.2
°
。7.根据权利要求1至6中任意一项所述的工业机器人rv简化减速器,其特征在于,工业机器人rv简化减速器的内啮合件的润滑不采用脂润滑而采用油润滑,在针齿壳(1)或圆端盖(14)上设有加油孔、放油孔及通气帽。
技术总结
本发明涉及工业机器人关节技术领域,提供一种工业机器人RV简化减速器,包括:行星架、针齿壳、双偏心轴、摆线轮、隔圈、轴承、针销及连接在针齿壳止口的圆端盖,行星架包括主、副圆盘、柱销及销套,摆线轮采用最佳正等距-正移距修形。根据本发明,大大简化了结构,散热空间增加30%-40%且改为油润滑,双偏心轴偏心段相位差≠180
技术研发人员:吴声震 刘谷华 顾辽兵 贾旭
受保护的技术使用者:苏州华震工业机器人减速器有限公司
技术研发日:2022.01.20
技术公布日:2022/6/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。