1.本发明涉及一种接近度控制设备以及配备有接近度控制设备的家用电器。
背景技术:
2.家用电器(例如,用于清洁或/和烘干衣物的机器、用于清洁餐具的机器、或用于加热或/和烹饪食物的烤箱或炊具)通常配备有手动可操作的控制元件,通过该控制元件用户可以手动控制所讨论的电器。这种控制元件以例如用于控制家用电器的操作的按钮和拨盘的形式存在,但也例如以用于打开家用电器的门的铰接元件的形式存在。
3.电容式接近度传感器的工作原理是:通过将对象移动到(开路)电容器的电场中,电容器的电容会发生变化。这种电容变化可以通过电振荡器电路来检测,该电振荡器电路的振荡频率根据电容器电容而变化。通过评估振荡频率,由此可以检测到对象靠近接近度传感器。接近度传感器可以用作例如接近度开关,用于检测用户靠近的手或手的一部分,因此是实现家用电器的控制元件的一种可能方式。
4.许多家用电器具有电器外壳,其外壳壁至少部分是金属的并且因此是导电的。电容式接近度传感器的电场区域中的金属壁的存在会影响传感器的电场。此外,外壳壁的振动可以引起外壳壁与接近度传感器的有源电容器电极之间的相对距离发生变化。这可以引起接近度传感器的电容变化,即使没有对象靠近接近度传感器,评估电子设备也可能将其错误地检测为对象靠近。
技术实现要素:
5.本发明的一个目的是提供一种接近度控制设备,其在家用电器的操作环境下允许可靠地检测用户的接近度控制手势并因此可靠地控制家用电器。
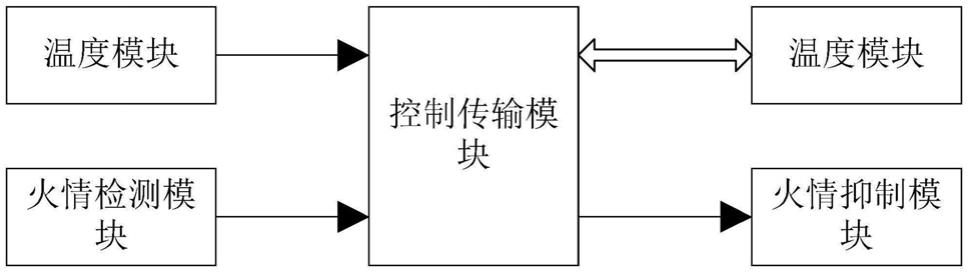
6.为了实现该目的,本发明提供了一种用于家用电器的接近度控制设备,该接近度控制设备包括:一对平面传感器电极,以一互空间距离布置;以及电子组件,连接到两个传感器电极,其中电子组件被配置为与一对传感器电极中的每一个传感器电极相关联地产生电传感器信号,并且通过两个传感器信号的相互关联,确定控制设备的接近度操作,其中电传感器信号表示与相应传感器电极相关联的电容的变化。
7.根据本发明,一对传感器电极中的每一个形成板型电容器的电容器电极。对于两个传感器电极中的每一个,传感器信号例如通过合适的振荡器电路由电子组件产生,该传感器信号表示所讨论的板型电容器的电容变化。传感器信号可以是例如模拟电流或电压信号;备选地,它可以是数字信号,其数字表示的信号值表示电容器电容或从其导出的参数(例如,振荡器电路的振荡频率)。几伏的恒定电位(例如,约1.8v和约5v之间的电位)可以施加到两个传感器电极,其中,可以想到的是,向两个传感器电极中的每一个施加相同的电位或不同的电位。
8.尽管两个传感器电极彼此相距一定空间距离,但至少在一些实施例中,它们还是布置得足够靠近彼此,使得当正确执行手动接近度控制手势时(例如,当用户的手指或手的
其他部分以适当的方式移动到更靠近接近度控制设备的指定控制表面以对其进行操作),两个传感器信号显示出反映控制手势的信号曲线。在这些实施例中,关于接近度控制手势的信息因此应该包含在两个传感器信号中,例如包含在信号大小中或/和包含在时间信号曲线中。然而,关于接近度控制手势的信息可以包含在具有不同特性(即,例如具有不同强度或/和具有不同时间模式)的两个传感器信号中。
9.在一些示例性实施例中,可以规定:传感器电极中的一个传感器电极被布置为在空间上比传感器电极中的另一个传感器电极更靠近接近度控制设备的控制表面。通过传感器电极相对于控制表面的这种相对布置,例如可以在两个传感器信号在相同方向上的信号变化中反映操作手势,然而,其中,一个传感器电极的传感器信号的信号幅度显著大于另一个传感器电极的传感器信号的相应幅度。相反,可以规定:被布置为更靠近控制表面的传感器电极同时被布置为比另一个传感器电极更远离家用电器的金属部件(例如,离金属外壳壁),该金属部件被认为是传感器信号的潜在电气干扰因素。结果,尽管金属部件的振动再次反映在两个传感器信号在相同方向上的信号变化中,但这些信号变化的强度在一个传感器电极的传感器信号中显著比在另一个传感器电极的传感器信号中弱。
10.更一般地说,接近度控制设备可以具体地通过传感器电极的形状和相互空间位置来设计,使得接近度控制手势以及靠近金属组件的振动在每种情况下显著不同地影响传感器信号。例如,如果与传感器电极之一相关联的传感器信号相对更强烈地响应用户的手动控制手势,则传感器电极之一可以原样用作“手电极”,而如果与传感器电极中的另一个传感器电极相关联的传感器信号相对更强烈地响应来自电器的干扰,则传感器电极中的另一个传感器电极可以原样用作“电器电极”。
11.通过联合评估两个传感器信号,电子组件可以相应地确定两个传感器电极的传感器信号的特定观察信号曲线是归因于用户的适当控制手势(即,接近度操作)还是仅仅是干扰影响(非期望的,但在实践中往往不可避免的)的结果。例如,如果用户不经意地用腿或手臂撞击家用电器,就可能发生不期望的振动。在这种意外发生的情况下,控制设备的操作当然不是由电子组件确定。这应该仅在电子组件通过一起考虑两个传感器电极的传感器信号来确定控制设备的操作已经实际发生时才发生。两个传感器信号的相互关联可以包括例如两个传感器信号的信号大小的定性或/和定量比较。备选地或另外地,两个传感器信号的相互关联可以包括对传感器信号的时间信号模式的分析。例如,可以想到的是,机械振动引起一系列多个、持续时间相对较短的信号峰值(特别是在对电容器电容或从其导出的参数进行信号采样,采样频率小于振动频率并且也不是振动频率的自然除数的情况下),而以操作为目的而执行的控制手势引起持续时间更长但连续的信号增加,也就是说,信号曲线整体“更流畅”。如果这些特性信号模式是可识别的(即,电容变化的特定原因的特性),则当然可以在信号评估中将它们考虑在内。
12.为了使两个传感器电极彼此电屏蔽,接近度控制设备可以具有屏蔽电极,其具体地具有同样的平面形式并布置在两个传感器电极之间的空间区域中。家用电器的接地电位或其他合适的电位可以施加到屏蔽电极。
13.本发明另外提供了一种家用电器,其包括:具有形成在其中的处理室(例如,洗涤室、烘干室、洗碗室、烹饪室)的电器主体;门,被布置为可相对于电器主体移动,用于关闭通向处理室的出入口;上面讨论的类型的接近度控制设备;以及,电子控制单元,适合于根据
接近度控制设备的接近度操作的确定来实现预定响应。家用电器是例如洗衣机、滚筒式烘干机或洗衣烘干机。洗衣烘干机被理解为是将洗衣机和滚筒式烘干机的功能组合的机器。
14.预定响应可以是用户可以通过合适的手动接近度控制手势在家用电器中发起的任何操作,并且特别是能够在电气控制下执行的操作。在一些实施例中,预定响应包括已关闭门的自动打开。如果控制设备的电子组件检测到接近度操作,则控制单元可以适当地控制家用电器的可电子控制的开门机构,例如,以便克服家用电器的机械门闩的保持关闭力而将门推开。在其他实施例中,预定响应包括另一个电器功能,例如开启(“唤醒”)家用电器,或者开始或停止家用电器的操作程序的执行。
15.不仅如此,特别是当接近度控制设备具有打开家用电器的门的功能时,传感器电极可以布置在门上。传感器电极由此可以布置在门的圆周边缘的区域中,其中它们被配置为在门的圆周方向上是细长的并且彼此重叠。传感器电极的细长形式允许为用户形成相对较大的控制面板。在前装载类型的衣物处理电器中(即具有圆形门,有时设计有牛眼窗,布置在机器的前侧),传感器电极可以沿门圆周以弧形弯曲的方式延伸。
16.如所说明的,根据本发明的接近度控制设备特别适合于安装在家用电器具有在空间上接近控制设备的安装位置的金属材料的地方,这会在干扰影响方面对电容式传感器的电容产生不利影响。因此,一些实施例规定,传感器电极布置在电器的向一侧上,在该侧上,电器主体具有金属外壳壁。
17.传感器电极由此可以布置在门上的一个位置处,使得当门关闭时,传感器电极中的一个传感器电极被布置为比传感器电极中的另一个传感器电极更靠近金属外壳壁。通过传感器电极相对于金属外壳壁的这种相对布置,金属外壳壁可以对两个传感器电极的传感器信号具有不同强度的干扰影响。
附图说明
18.下文中将参考附图进一步说明本发明,在附图中:
19.图1示意性地示出了根据示例性实施例的前装载类型的家用洗衣机,
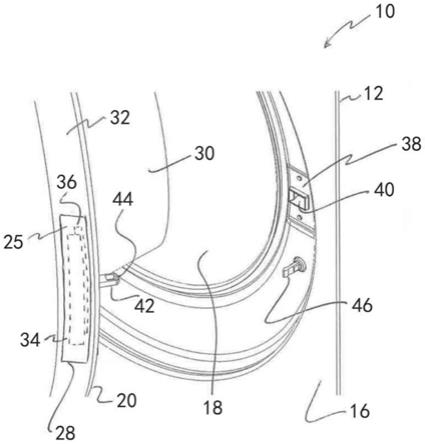
20.图2示出了图1的洗衣机的放大细节,其中门部分打开,以及
21.图3是图1和图2的洗衣机中设置的根据示例性实施例的接近度控制设备的电路图。
具体实施方式
22.首先将参考图1。其中,以高度示意性的形式示出并总体上用10表示的洗衣机具有机器主体(电器主体)12,其中形成有用于接纳待被清洁的洗涤物的洗涤室,该洗涤室未在图1中更详细地示出。洗涤室可以以本身已知的方式形成在洗涤滚筒中,该洗涤滚筒可旋转地容纳在液体容器中,该液体容器容纳在形成机器主体12的可见外表面的主体外壳14的内部中。在机器主体12的前壁16中,形成有通向洗涤室的出入口(access opening)18。通常为牛眼门形式的门20安装在机器主体12上,以便可围绕竖直枢轴枢转并且允许出入口18关闭。由于出入口18被门20(被描绘为关闭)遮住了,因此出入口18在图1中仅由虚线表示。尽管在图1中未更详细地示出,但通常在图1所示类型的洗衣机中,在出入口18周围将珠状门密封件附接到前壁16,该密封件在门20关闭时被压缩,从而在门20关闭时使洗涤室对外密
封以防止水的泄漏。
23.为了在门20进入关闭位置(在该关闭位置中,出入口18被关闭)时保持门20关闭,洗衣机10配备有门闩22。例如,门闩22是拉闩式的,其允许用户简单地通过拉已关闭的门来打开门20。在一些实施例中,用户必须用足够大的力拉门以克服门闩22的保持关闭力。门闩22的保持关闭力基于例如至少一个关闭弹簧(未更详细地示出),该关闭弹簧在门20关闭时松弛,并且必须再次置于(增加的)张力下以便打开门闩22。在门20关闭时关闭弹簧的松弛(relaxation)具有将门20拉关闭的效果,结果是,抵抗所述的门密封件的阻力而将门20更紧地拉靠在机器主体12上。这种拉式门闩也被称为推拉式门闩。
24.洗衣机10还包括电控开门器24,其提供自动推动已关闭门20打开的功能。开门器24和门闩22可以是分离的、机械独立的功能单元,或者它们可以组合在结构单元中。在这里,自动意味着用户不必自己用手拉门20或推门20。开门器24的启动可以在程序的控制下发生;在这里考虑的示例性实施例中,在门20上另外布置了控制面板25(参见图2),该控制面板25是接近度控制设备中的允许用户如他的意愿启动开门器24以打开门20的部分。
25.在图1中,门闩22和开门器24被示出为彼此非常接近,其中它们被布置为与铰接点实质上径向相对,门的枢转铰链(未更详细地示出)位于该铰接点处,门20通过该枢转铰链安装在机器主体12上。门闩22和开门器24的这种布置当然仅是示例性的而非限制性的。开门器24的备选位置的示例由图1中24'处的虚线描绘,在该位置中开门器被布置为相对于门闩22具有约四分之一圆的角偏移。
26.开门器24由洗衣机10的用26表示的控制单元电控制。例如,在洗衣机10的运行周期结束时,控制单元26可以在程序的控制下控制开门器24打开门20,使得水分或热蒸汽可以从洗涤室中逸出并且洗涤室内的衣物不会发霉。在打开门20时,开门器24必须克服门闩22的试图保持门20关闭的一定保持力(保持关闭力)。附加地,开门器24可以通过用户用手触摸控制面板25或将他的手移动到足够靠近控制面板25以致电容式接近度控制设备28(图3)检测接近度控制设备28的接近度操作来激活。下文中将详细说明接近度控制设备28的电气结构。然而,首先将说明图2。
27.根据图2,门20是具有牛眼窗30的牛眼门的形式。牛眼窗30被环形窗框32围绕,该环形窗框32通常由塑料材料制成,在该环形窗框32上布置有控制面板25。控制面板25可以由设置在窗框32中的单独传感器模块形成;备选地,可以想到的是,控制面板25仅仅是窗框32的在视觉上对用户进行强调的区域。控制面板25的主要功能是定义视觉上可感知的定界区域,用户将该定界区域解释为用于通过传感器检测控制手势的区域。在控制面板25的区域中,两个传感器电极34、36(由虚线表示)的布置以隐藏方式容纳在窗框32中,在所示的示例中这些传感器电极为条状细长形式。传感器电极34、36可以例如彼此相距一定距离的方式安装在公共承载组件(未示出)上,该承载组件又被设置到窗框32中。包含承载组件和两个传感器电极34、36(以及可选的附加屏蔽电极)的传感器模块因此可以被预制并作为预制模块安装在家用电器(这里是洗衣机10)上。承载组件可以例如由异型杆形成,该异型杆根据门20的圆周轮廓弧形弯曲。备选地,印刷电路板可以用作承载组件,其中在印刷电路板上形成的导体轨迹面可以形成传感器电极34、36。
28.在所示的示例中,传感器电极34、36沿门20的圆周方向延伸,其中它们的圆周长度是例如至少5cm或至少10cm或至少15cm或至少20cm。备选地,可以想到以传感器电极34、36
在径向方向上(基于门20的中点)细长的方式配置传感器电极34、36并将它们安装在门20中。
29.传感器电极34、36之间的距离为例如几毫米或几厘米。传感器电极34、36例如由具有足够导电性的金属材料(例如,铝或银)的金属箔片或金属片形成;备选地,它们可以由印刷电路板上的导电轨迹(track)形成。两个传感器电极34、36例如可以是板型电极的形式,或者它们可以是横截面为例如l形或c形的异型电极的形式。
30.传感器电极34、36可以安装在门20中,使得它们重叠。这意味着重叠使得当门20关闭时,从用户站在洗衣机10的前壁16的前面的角度来看,两个传感器电极34、36一个接一个地(也就是说,一个在前面,另一个在后面)布置。从这种用户的角度来看,传感器电极34、36中的一个(在图2所示的示例中为传感器电极34)是前电极,而传感器电极34、36中的另一个(在图2所示的示例中为传感器电极36)是后电极。前传感器电极34因此更靠近假想的用户,并且因此,当门20关闭时,与后传感器电极36相比,前传感器电极34与机器主体12的前壁16的距离稍微更大。假设前壁16至少大部分由金属材料组成,则前壁16对由后传感器电极36产生的电场的(干扰)影响大于前壁16对由前传感器电极34产生的电场的影响。例如,如果用户用他的膝盖撞击前壁16,则在前壁16处可能发生振动,然后该振动使得由前传感器电极34形成的(开路)电容器中的电容变化程度小于由后传感器电极36形成的(开路)电容器中的电容变化程度。
31.然而,传感器电极34、36的相互重叠不是必需的。例如,如果门20在关闭时必须预期能够围绕特定轴摆动,则传感器电极34、36可以布置在该轴的任一侧上(例如,镜像对称)。门20的摆动运动然后将在相对于彼此具有相位偏移的两个传感器电极34、36的传感器信号中反映。另一方面,接近度控制手势将对两个传感器电极34、36的传感器信号产生显著不同的影响。以这种方式,通过一起考虑传感器电极34、36两者的传感器信号,可以将控制设备28的接近度操作与例如门20的无意或不期望的摆动区分开来。
32.相反,前传感器电极34比后传感器电极36在更大程度上暴露于当用户将他的手移向控制面板25以意图打开已关闭门20时发生的电容变化。通过适当地确定传感器电极34、36的尺寸和配置传感器电极34、36,可以相应地通过将各自表示传感器电极34、36之一的电容变化的两个传感器信号一起考虑,从而可靠地区分通过前壁16的振动引起电容变化或通过用户的手移动到更靠近控制面板25引起电容变化的两种情况。
33.在图2所示的示例中,具有两个传感器电极34、36的控制面板25大约布置在门20的3点钟位置处。应当理解,控制面板25可以可选地布置在沿门20的圆周的其他位置处,例如6点钟位置。
34.在图2中还可以看到门闩组件38,该门闩组件38是门闩22的一部分并且具有插入开口40,布置在门20上的关闭镫42在门20关闭时插入该插入开口40中。关闭镫42具有前镫腹板44,在门20关闭时,该前镫腹板被组件38中包含的抓手(此处未更详细地示出)抓紧。例如,由门闩组件38和关闭镫42形成的门闩22可以具有如de 198 37248a1中所示出和描述的配置。该de说明书的内容通过引用整体并入本文。
35.在所示的示例中,开门器24包括布置在机器主体12上的按钮45,该按钮45在缩回位置和前进位置(图2)之间可调节,并且当门20关闭时,按钮45能够通过向前移动到前进位置将门20推开。
36.现在将另外参考图3。根据其中所示的电路图,正dc电位 u1或 u2被施加到传感器电极34、36。应当理解,替代正dc电位,可以将负dc电位施加到传感器电极34、36。被施加到两个传感器电极34、36的电位可以具有相同的符号或不同的符号,并且在大小上可以相同或不同。两个传感器电极34、36连接到电子组件48,该电子组件48与传感器电极34、36中的每一个相关联地产生电传感器信号,该电传感器信号表示由所讨论的传感器电极34、36形成的开路板型电容器的电容变化。为此,电子组件48可以以本身已知的方式包括例如与传感器电极34、36中的每一个相关联的rc振荡器电路,其中所讨论的传感器电极34或36是振荡器电路电容器的一部分。电子组件48可以布置在机器主体12上并且经由导线(未更详细地示出)连接到传感器电极34、36,该导线经由门20的枢转铰链引导。
37.作为手指或手的其他部分(从图3的图示中的左侧)朝向接近度控制设备28移动的结果,由传感器电极34、36形成的每个电容器的电容改变,其中在所示接近度控制设备28的配置中,两个电容器中的电容变化在相同方向上(例如,随着手指越来越靠近而变得更大)并且反映在两个振荡器电路的振荡频率的变化(相应地在相同方向上)中。然而,因为传感器电极34、36与靠近手指的距离不同,所以两个传感器电极34、36中的电容变化的程度不同。
38.如果前壁16开始振动,则这也可能引起两个电容器在相同方向上但强度不同的电容变化。通过评估两个振荡器电路的振荡行为,电子组件48可以确定观察到的振荡频率变化是由用户的手动控制手势还是由前壁16的振动引起。相应地,电子组件48可以检测接近度控制设备28的适当(即,手动)接近度操作是否已经发生,或者所观察到的振荡器电路的振荡频率变化的强度或/和时间曲线或/和其他特性是否引起不存在接近度控制设备28的有意操作的结论。
39.评估的结果可以由电子组件48发送到控制单元26,该控制单元26可以根据所传达的评估结果(如果接近度操作被传达)以限定的方式做出响应。例如,如所说明的,当接近度控制设备28的接近度操作被传达时,控制单元26可以实现门20的自动打开。
40.接近度控制设备28可以另外具有布置在两个传感器电极34、36之间的屏蔽电极50,在所示的示例中,该屏蔽电极处于接地电位。针对屏蔽电极50当然可以选择与接地电位不同的电位。屏蔽电极50与传感器电极34、36一起装配到门20的窗框32中,并且可以是所述传感器模块的一部分。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。