1.本发明涉及电力系统暂态计算领域,更具体地,涉及一种基于变机械负载转矩的感应电动机转子滑差计算方法。
背景技术:
2.随着“西电东送”战略的实施和深化,我国“长三角”和“珠三角”等负荷中心均已形成典型的受端系统结构。受端系统负荷重、感应电动机负荷比例高,电网发生故障及恢复过程中,感应电动机由于电磁转矩下降,滑差增大,常会吸收大量的暂态功率,导致系统暂态电压难以恢复。学术界注意到研究电动机暂态特性与电压跌落相互影响的重要性,提出试验法、时域仿真法与解析法等三类研究方法。
3.试验法借助电压跌落发生器产生各种类别的电压跌落波形,记录电动机的输出响应,进而分析电压跌落与电动机的相互影响。时域仿真法借助电力系统电磁暂态或机电暂态仿真程序,考虑较为精确的电动机暂态模型,通过数值计算对问题进行探讨。二者的优点在于结果真实可信,但为揭示某一因素的影响,常需进行多次试验或仿真。除了繁琐、费时之外,在分析和解释试验和仿真现象时,都显得力所不及。
4.公开日为2019年02月19日,公开号为cn109359266a的中国专利公开了一种感应电动机暂态响应的求解方法,包括:获取感应电动机的参数数据;根据参数数据计算出近似负序阻抗zin2;再结合电网系统的电网数据,确定出负序电磁转矩te8,负序有功消耗pe8及负序无功消耗qe8;联立正序电力网络方程,感应电动机定子电压方程,感应电动机三阶机电暂态方程,有功消耗计算方程以及无功消耗计算方程,计算出暂态响应;不对称故障期间三阶机电暂态方程中的总电磁转矩te计入负序电磁转矩te8,有功消耗计算方程计入负序有功消耗pe8,无功消耗计算方程计入负序无功消耗qe85.现有技术中,解析法借助电路和电机分析理论,显式求解电动机暂态响应和系统电压间的交互作用,是最根本、最透彻的研究方法,但难度较大。到目前为止,解析法尚未取得突破性进展,还不能准确求得受扰后电动机的全部运行和状态变量。在机电暂态仿真中,由于无法详细模拟感应电动机定子绕组的暂态过程,截止目前仍采用基于三相对称正序电压推导出的感应电动机三阶暂态模型作为其仿真模型,因而在发生不对称故障时其计算精度不高。
技术实现要素:
6.本发明提供一种基于变机械负载转矩的感应电动机转子滑差计算方法,快速计算电力系统对称和不对称故障电压跌落下感应电动机负荷转子滑差动态特性。
7.为解决上述技术问题,本发明的技术方案如下:
8.一种基于变机械负载转矩的感应电动机转子滑差计算方法,包括以下步骤:
9.一种基于变机械负载转矩的感应电动机转子滑差计算方法,包括以下步骤:
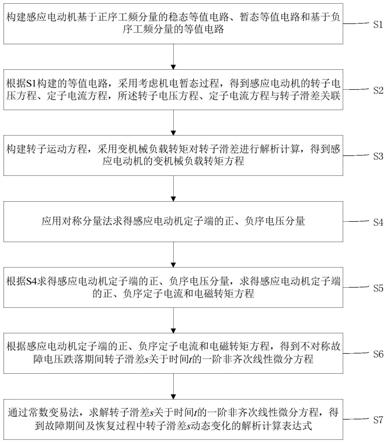
10.s1:构建感应电动机基于正序工频分量的稳态等值电路、暂态等值电路和基于负
序工频分量的等值电路;
11.s2:根据s1构建的等值电路,采用考虑机电暂态过程,得到感应电动机的转子电压方程、定子电流方程,所述转子电压方程、定子电流方程与转子滑差关联;
12.s3:构建转子运动方程,采用变机械负载转矩对转子滑差进行解析计算,得到感应电动机的变机械负载转矩方程;
13.s4:应用对称分量法求得感应电动机定子端的正、负序电压分量;
14.s5:根据s4求得感应电动机定子端的正、负序电压分量,求得感应电动机定子端的正、负序定子电流和电磁转矩方程;
15.s6:根据感应电动机定子端的正、负序定子电流和电磁转矩方程,得到不对称故障电压跌落期间转子滑差s关于时间t的一阶非齐次线性微分方程;
16.s7:通过常数变易法,求解转子滑差s关于时间t的一阶非齐次线性微分方程,得到故障期间及恢复过程中转子滑差s动态变化的解析计算表达式。
17.优选地,所述感应电动机基于正序工频分量的稳态等值电路包括外施定子端电压定子电阻rs、定子电抗xs、励磁电抗xm、转子电抗xr和考虑转子滑差后的转子电阻其中:
18.外施定子端电压的一端与定子电阻rs的一端电连接,定子电阻rs的另一端与定子电抗xs的一端电连接,定子电抗xs的另一端分别与励磁电抗xm的一端、转子电抗xr的一端电连接,转子电抗xr的另一端与考虑转子滑差后的转子电阻的一端电连接,考虑转子滑差后的转子电阻的另一端分别与励磁电抗xm的另一端、外施定子端电压的另一端电连接;
19.所述感应电动机基于正序工频分量的暂态等值电路包括外施定子端电压定子电阻rs、转子短路电抗x'和转子暂态电势e',其中:
20.外施定子端电压的一端与定子电阻rs的一端电连接,定子电阻rs的另一端与转子短路电抗x'的一端电连接,转子短路电抗x'的另一端与转子暂态电势e'的一端电连接,转子暂态电势e'的另一端与外施定子端电压的另一端电连接;
21.当电源通过等值阻抗为z
eq
=r
eq
jx
eq
的供电网络向感应电动机im供电时,感应电动机的负序等值电路包括外施电压定子电阻rs、定子电抗xs、励磁电抗xm、转子电抗xr和考虑转子滑差后的转子电阻其中:
22.外施定子端电压的一端与定子电阻rs的一端电连接,定子电阻rs的另一端与定子电抗xs的一端电连接,定子电抗xs的另一端分别与励磁电抗xm的一端、转子电抗xr的一端电连接,转子电抗xr的另一端与考虑转子滑差后的转子电阻的一端电连接,考虑转子滑差后的转子电阻的另一端分别与励磁电抗xm的另一端、外施定子端电压的另一端
电连接。
23.优选地,步骤s2所述的转子电压方程为:
[0024][0025]
式中,为外施定子端电压,e'd和e'q分别为转子暂态电势e'的d轴和q轴分量,i
ds
和i
qs
分别为定子电流的d轴和q轴分量,x=xs xm为转子开路电抗;为转子短路电抗;为定子开路、转子回路暂态时间常数,ωs为电动机同步转速,ωm为电动机转速,为转子滑差,rs和xs为定子电阻、电抗,rr和xr为转子电阻、电抗,xm为励磁电抗。
[0026]
优选地,步骤s2所述的定子电流方程为:
[0027][0028]
式中,v
ds
和v
qs
分别为外施定子电压的d轴和q轴分量。
[0029]
优选地,步骤s3所述的转子运动方程为:
[0030][0031]
式中,tj为电动机惯性时间常数,te为电磁转矩,tm为机械负载转矩。
[0032]
优选地,步骤s3中的感应电动机的变机械负载转矩方程为:
[0033]
tm=t
m0
β0s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0034]
式中,t
m0
为稳定运行时感应电动机的初始机械转矩,β0为转矩系数。
[0035]
优选地,步骤s4中应用对称分量法求得感应电动机定子端的正、负序电压分量,其计算式为:
[0036][0037]
式中,a=1∠120
°
,分别为电源相电压,分别为电源正、负、零序电压。
[0038]
优选地,步骤s5中根据s4求得感应电动机定子端的正、负序电压分量,求得感应电动机定子端的正、负序定子电流和电磁转矩方程,其中:
[0039]
送端发电机功率p
eq
jq
eq
与受端电动机功率pd jqd满足下式:
[0040][0041]
电动机端正、负序电压计算如下:
[0042][0043]
式中,下标“1”、“2”分别表示正、负序分量,为电源正、负序电压共轭值,送端发电机功率为p
eq
jq
eq
;
[0044]
考虑到2-s≈2,有:
[0045][0046][0047][0048][0049]
式中,下标“1”、“2”分别表示正、负序分量,z
rs
为中间变量,
[0050]
不对称故障电压跌落期间,电动机的转子运动方程为:
[0051][0052]
式中,t
e1
、t
e2
分别表示正、负序电磁转矩。
[0053]
优选地,步骤s6根据感应电动机定子端的正、负序定子电流和电磁转矩方程,得到不对称故障电压跌落期间转子滑差s关于时间t的一阶非齐次线性微分方程:
[0054]
联合(6)、(10)、(11)和(12),得不对称故障电压跌落期间转子滑差s关于时间t的一阶非齐次线性微分方程:
[0055][0056]
电压跌落清除后,定子电压中不含负序电压分量,转子运动方程也不再含有负序电磁转矩t
e2
,有:
[0057][0058]
联立式(6)、(10)、(11)和(14),可得故障清除后转子滑差s关于时间t的一阶非齐
次线性微分方程:
[0059][0060]
优选地,令感应电动机的初始转子滑差为s0,从电压跌落发生时刻t0开始不断增大,到故障清除时刻t1,感应电动机转子滑差增大到s1,电压跌落清除后,经过一段时间,感应电动机的转子滑差才恢复;
[0061]
通过常数变易法令:
[0062][0063]
式中,v
s1
为外施定子端电压正序分量,v
s2
外施定子端电压负序分量,rr为转子电阻,ωs为电动机同步转速,β0为转矩系数,tj为电动机惯性时间常数,t
m0
为稳定运行时感应电动机的初始机械转矩;
[0064]
代入式(13),求得故障期间感应电动机转子滑差s
dur
的近似解析计算表达式为:
[0065][0066]
通过常数变易法令:
[0067][0068]
式中,tm为机械负载转矩;
[0069]
代入式(15)求得故障清除后感应电动机转子滑差s
after
的近似解析计算表达式为:
[0070][0071]
与现有技术相比,本发明技术方案的有益效果是:
[0072]
本发明使复杂的电磁暂态时域仿真计算过程简单化,节约了时域仿真计算时间和工作量,可以求出任意类型故障发生后感应电动机转子滑差s的动态过程变化特性。同时该解析计算方法显式给出了受扰后感应电动机各机械、电气参量的计算表达式,除可用于快速评估感应电动机转子滑差与电压跌落的相互影响外,也有潜力应用于电力系统稳定性分析中。
附图说明
[0073]
图1为本发明的方法流程示意图。
[0074]
图2为感应电动机基于正序工频分量的稳态等值电路示意图。
[0075]
图3为感应电动机基于正序工频分量的暂态等值电路示意图。
[0076]
图4为单机带电动机供电系统示意图。
[0077]
图5为感应电动机基于负序工频分量的稳态等值电路示意图。
[0078]
图6为电压跌落时感应电动机转速变化趋势图。
[0079]
图7为单机带感应电动机负荷供电系统示意图。
[0080]
图8为在1400kw电动机中运用实施例的计算方法与电磁暂态仿真程序pscad/emtdc仿真方法得到的a相电压的比较示意图。
[0081]
图9为在1400kw电动机中运用实施例的计算方法与电磁暂态仿真程序pscad/emtdc仿真方法得到的b相电压的比较示意图。
[0082]
图10为在1400kw电动机中运用实施例的计算方法与电磁暂态仿真程序pscad/emtdc仿真方法得到的c相电压的比较示意图。
[0083]
图11为在1400kw电动机中运用实施例的计算方法与电磁暂态仿真程序pscad/emtdc仿真方法得到的转子滑差的比较示意图。
[0084]
图12为在1200kw电动机中运用实施例的计算方法与电磁暂态仿真程序pscad/emtdc仿真方法得到的a相电压的比较示意图。
[0085]
图13为在1200kw电动机中运用实施例的计算方法与电磁暂态仿真程序pscad/emtdc仿真方法得到的b相电压的比较示意图。
[0086]
图14为在1200kw电动机中运用实施例的计算方法与电磁暂态仿真程序pscad/emtdc仿真方法得到的c相电压的比较示意图。
[0087]
图15为在1200kw电动机中运用实施例的计算方法与电磁暂态仿真程序pscad/emtdc仿真方法得到的转子滑差的比较示意图。
具体实施方式
[0088]
附图仅用于示例性说明,不能理解为对本专利的限制;
[0089]
为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;
[0090]
对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
[0091]
下面结合附图和实施例对本发明的技术方案做进一步的说明。
[0092]
实施例1
[0093]
本实施例提供一种基于变机械负载转矩的感应电动机转子滑差计算方法,如图1,包括以下步骤:
[0094]
s1:构建感应电动机基于正序工频分量的稳态等值电路、暂态等值电路和基于负序工频分量的等值电路;
[0095]
s2:根据s1构建的等值电路,采用考虑机电暂态过程,得到感应电动机的转子电压方程、定子电流方程,所述转子电压方程、定子电流方程与转子滑差关联;
[0096]
s3:构建转子运动方程,采用变机械负载转矩对转子滑差进行解析计算,得到感应电动机的变机械负载转矩方程;
[0097]
s4:应用对称分量法求得感应电动机定子端的正、负序电压分量;
[0098]
s5:根据s4求得感应电动机定子端的正、负序电压分量,求得感应电动机定子端的正、负序定子电流和电磁转矩方程;
[0099]
s6:根据感应电动机定子端的正、负序定子电流和电磁转矩方程,得到不对称故障
电压跌落期间转子滑差s关于时间t的一阶非齐次线性微分方程;
[0100]
s7:通过常数变易法,求解转子滑差s关于时间t的一阶非齐次线性微分方程,得到故障期间及恢复过程中转子滑差s动态变化的解析计算表达式。
[0101]
所述感应电动机基于正序工频分量的稳态等值电路如图2,包括外施定子端电压定子电阻rs、定子电抗xs、励磁电抗xm、转子电抗xr和考虑转子滑差后的转子电阻其中:
[0102]
外施定子端电压的一端与定子电阻rs的一端电连接,定子电阻rs的另一端与定子电抗xs的一端电连接,定子电抗xs的另一端分别与励磁电抗xm的一端、转子电抗xr的一端电连接,转子电抗xr的另一端与考虑转子滑差后的转子电阻的一端电连接,考虑转子滑差后的转子电阻的另一端分别与励磁电抗xm的另一端、外施定子端电压的另一端电连接;
[0103]
所述感应电动机基于正序工频分量的暂态等值电路如图3,包括外施定子端电压定子电阻rs、转子短路电抗x'和转子暂态电势e',其中:
[0104]
外施定子端电压的一端与定子电阻rs的一端电连接,定子电阻rs的另一端与转子短路电抗x'的一端电连接,转子短路电抗x'的另一端与转子暂态电势e'的一端电连接,转子暂态电势e'的另一端与外施定子端电压的另一端电连接;
[0105]
当电源通过如图4所示的等值阻抗为z
eq
=r
eq
jx
eq
的供电网络向感应电动机im供电时,感应电动机的负序等值电路如图5,包括外施电压定子电阻rs、定子电抗xs、励磁电抗xm、转子电抗xr和考虑转子滑差后的转子电阻其中:
[0106]
外施定子端电压的一端与定子电阻rs的一端电连接,定子电阻rs的另一端与定子电抗xs的一端电连接,定子电抗xs的另一端分别与励磁电抗xm的一端、转子电抗xr的一端电连接,转子电抗xr的另一端与考虑转子滑差后的转子电阻的一端电连接,考虑转子滑差后的转子电阻的另一端分别与励磁电抗xm的另一端、外施定子端电压的另一端电连接。
[0107]
步骤s2所述的转子电压方程为:
[0108][0109]
式中,为外施定子端电压,e'd和e'q分别为转子暂态电势e'的d轴和q轴分量,i
ds
和i
qs
分别为定子电流的d轴和q轴分量,x=xs xm为转子开路电抗;为转子
短路电抗;为定子开路、转子回路暂态时间常数,ωs为电动机同步转速,ωm为电动机转速,为转子滑差,rs和xs为定子电阻、电抗,rr和xr为转子电阻、电抗,xm为励磁电抗。
[0110]
步骤s2所述的定子电流方程为:
[0111][0112]
式中,v
ds
和v
qs
分别为外施定子电压的d轴和q轴分量。
[0113]
步骤s3所述的转子运动方程为:
[0114][0115]
式中,tj为电动机惯性时间常数,te为电磁转矩,tm为机械负载转矩。
[0116]
步骤s3中的感应电动机的变机械负载转矩方程为:
[0117]
tm=t
m0
β0s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0118]
式中,t
m0
为稳定运行时感应电动机的初始机械转矩,β0为转矩系数。
[0119]
步骤s4中应用对称分量法求得感应电动机定子端的正、负序电压分量,其计算式为:
[0120][0121]
式中,a=1∠120
°
,分别为电源相电压,分别为电源正、负、零序电压。
[0122]
步骤s5中根据s4求得感应电动机定子端的正、负序电压分量,求得感应电动机定子端的正、负序定子电流和电磁转矩方程,其中:
[0123]
送端发电机功率p
eq
jq
eq
与受端电动机功率pd jqd满足下式:
[0124][0125]
电动机端正、负序电压计算如下:
[0126][0127]
式中,下标“1”、“2”分别表示正、负序分量,为电源正、负序电压共轭
值,送端发电机功率为p
eq
jq
eq
;
[0128]
考虑到2-s≈2,有:
[0129][0130][0131][0132][0133]
式中,下标“1”、“2”分别表示正、负序分量,z
rs
为中间变量,
[0134]
不对称故障电压跌落期间,电动机的转子运动方程为:
[0135][0136]
式中,t
e1
、t
e2
分别表示正、负序电磁转矩。
[0137]
步骤s6根据感应电动机定子端的正、负序定子电流和电磁转矩方程,得到不对称故障电压跌落期间转子滑差s关于时间t的一阶非齐次线性微分方程:
[0138]
联合(6)、(10)、(11)和(12),得不对称故障电压跌落期间转子滑差s关于时间t的一阶非齐次线性微分方程:
[0139][0140]
电压跌落清除后,定子电压中不含负序电压分量,转子运动方程也不再含有负序电磁转矩t
e2
,有:
[0141][0142]
联立式(6)、(10)、(11)和(14),可得故障清除后转子滑差s关于时间t的一阶非齐次线性微分方程:
[0143][0144]
上级供电网络发生故障导致电压跌落时,感应电动机的转子滑差动态变化趋势如图6所示。
[0145]
令感应电动机的初始转子滑差为s0,从电压跌落发生时刻t0开始不断增大,到故障清除时刻t1,感应电动机转子滑差增大到s1,电压跌落清除后,经过一段时间,感应电动机的转子滑差才恢复;
[0146]
通过常数变易法令:
[0147][0148]
式中,v
s1
为外施定子端电压正序分量,v
s2
外施定子端电压负序分量,rr为转子电阻,ωs为电动机同步转速,β0为转矩系数,tj为电动机惯性时间常数,t
m0
为稳定运行时感应电动机的初始机械转矩;
[0149]
代入式(13),求得故障期间感应电动机转子滑差s
dur
的近似解析计算表达式为:
[0150][0151]
通过常数变易法令:
[0152][0153]
式中,tm为机械负载转矩;
[0154]
代入式(15)求得故障清除后感应电动机转子滑差s
after
的近似解析计算表达式为:
[0155][0156]
为了验证本文提出的感应电动机动态特性解析算法对于不同故障类型和不同电动机参数的有效性和适应性,采用表1中电动机参数,在电磁暂态仿真程序pscad/emtdc搭建图7所示10kv供电系统的仿真模型,进行了以下2种情形的比较:1)设置电源在0.2s时发生持续时间为0.2s的不对称故障电压跌落(电压跌落前:e
eqa,pre
=1.0∠0
°
pu,e
eqb,pre
=1.0∠-120
°
pu,e
eqc,pre
=1.0∠120
°
pu;电压跌落期间:e
eqa,dur
=0.8∠0
°
pu,e
eqb,dur
=0.6∠-120
°
pu,e
eqc,dur
=0.4∠120
°
pu),采用表1中容量为1400kw的电动机;2)设置电源在0.2s时发生持续时间为0.2s的对称故障电压跌落(电压跌落前:e
eqa,pre
=1.0∠0
°
pu,e
eqb,pre
=1.0∠-120
°
pu,e
eqc,pre
=1.0∠120
°
pu;电压跌落期间:e
eqa,dur
=0.6∠0
°
pu,e
eqb,dur
=0.6∠-120
°
pu,e
eqc,dur
=0.6∠120
°
pu),采用表1中容量为1000kw的电动机。算例中电动机均带额定负载运行,机械负载转矩系数β0=0.85,通过初始化计算得到参数t
m0
,系统等值阻抗z
eq
=(1.5 j4.0)ω,pscad/emtdc仿真步长为100us,解析算法计算步长为0.01s,计算结果见图8至图15。从图中可知,本发明计算的电动机转子滑差动态特性均与pscad/emtdc仿真结果吻合良好,表明了本发明算法的有效性和准确性。值得一提的是在电压跌落发生和清除的瞬间,解析法的计算结果会发生突变,而pscad/emtdc不会。产生这种差异的主要原因在于解析法没有计及定子绕组的电磁暂态过程,即认为定子绕组的各电气量是可以突变的。
[0157]
表1
[0158][0159]
相同或相似的标号对应相同或相似的部件;
[0160]
附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制;
[0161]
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
