1.本发明涉及编码器单元、驱动装置以及机器人。
背景技术:
2.在专利文献1中,记载有根据光学式编码器以及磁式编码器的输出来检测电机的旋转轴的旋转角度的编码器。光学式编码器具有固定于电机的旋转轴的光学标尺单元、以及检测光学标尺单元的旋转状态的光学传感器,光学传感器搭载于第一基板。磁式编码器具有固定于旋转轴的主齿轮、与主齿轮啮合的两个副齿轮、固定于各副齿轮的磁铁、以及检测各磁铁的旋转状态的两个磁传感器,两个磁传感器搭载于第二基板。并且,从电机侧依次排列配置主齿轮和副齿轮、第二基板、光学标尺单元以及第一基板。
3.专利文献1:日本特开2018-136257号公报
4.然而,在这样结构的编码器中,由于光学传感器和磁传感器搭载于不同的基板,需要多个基板,因此存在难以实现编码器的薄型化的技术问题。
技术实现要素:
5.本发明的编码器单元,具有磁式编码器、光学式编码器以及基板,所述磁式编码器具有固定于旋转轴的主齿轮、与所述主齿轮啮合的多个副齿轮、配置于各所述副齿轮的磁铁、以及对应的所述磁铁的磁场所作用的多个磁传感器,所述光学式编码器在所述旋转轴的轴向上与所述磁式编码器分离地配置,并具有固定于所述旋转轴的光学标尺、以及接收由所述光学标尺反射的光的光学传感器,所述基板配置于所述磁铁与所述光学标尺之间,在一个面上安装有所述磁传感器,在另一个面上安装有所述光学传感器。
6.本发明的驱动装置具备:上述编码器单元;以及电机,具有所述旋转轴。
7.本发明的机器人,具有:第一部件;第二部件,相对于所述第一部件位移;以及上述驱动装置,使所述第二部件相对于所述第一部件位移。
附图说明
8.图1是表示本发明的实施方式所涉及的机器人系统的整体图。
9.图2是驱动装置的截面图。
10.图3是驱动装置的截面图。
11.附图标记说明
[0012]1…
机器人系统;2
…
机器人;3
…
控制装置;5
…
电机;6
…
编码器单元;20
…
基座;21
…
机械臂;22
…
末端执行器;41
…
驱动装置;42
…
驱动装置;43
…
驱动装置;44
…
驱动装置;45
…
驱动装置;46
…
驱动装置;51
…
旋转轴;52
…
转子;53
…
定子;54
…
外壳;55
…
轴承;56
…
轴承;60
…
外壳;61
…
光学式编码器;62
…
磁式编码器;63
…
基板;64
…
电路元件;65
…
连接器;211
…
臂;212
…
臂;213
…
臂;214
…
臂;215
…
臂;216
…
臂;611
…
光学标尺;611a
…
毂;611b
…
盘;612
…
光学传感器;612a
…
发光元件;612b
…
受光元件;621
…
主齿轮;622a
…
副齿轮;622b
…
副齿轮;623a
…
磁铁;623b
…
磁铁;624a
…
磁传感器;624b
…
磁传感器;631
…
下表面;632
…
上表面;641
…
旋转角度检测电路;642
…
转速检测电路;643
…
旋转量计算电路;644
…
接口电路;651
…
插入口;g
…
间隙;l
…
光;r1
…
第一部件;r2
…
第二部件;az
…
轴线;az1
…
轴线;az2
…
轴线。
具体实施方式
[0013]
以下,基于附图所示的优选的实施方式,对本发明的编码器单元、驱动装置以及机器人进行详细说明。
[0014]
图1是表示本发明的实施方式所涉及的机器人系统的整体图。图2和图3分别是驱动装置的截面图。需要说明的是,图3是使图2围绕z轴旋转90
°
后的截面图。以下,为了便于说明,将相互正交的三个轴作为x轴、y轴、以及z轴进行说明。另外,将表示x轴、y轴以及z轴的各箭头的前端侧设为“ ”,将基端侧设为“-”。另外,将与x轴平行的方向称为“x轴方向”,将与y轴平行的方向称为“y轴方向”,将与z轴平行的方向称为“z轴方向”。另外,也将 z轴方向侧称为“上”,将-z轴方向侧称为“下”。
[0015]
图1所示的机器人系统1能够进行精密设备、构成精密设备的零件的供件、卸件、输送以及组装等作业。机器人系统1具有:机器人2,执行预定的作业;以及控制装置3,控制机器人2的驱动。
[0016]
机器人2是六轴机器人。机器人2具有:基座20,固定于地板、墙壁、天花板等;机械臂21,支承于基座20;以及末端执行器22,安装于机械臂21的前端。另外,机械臂21具有:臂211,转动自由地连结于基座20;臂212,转动自由地连结于臂211;臂213,转动自由地连结于臂212;臂214,转动自由地连结于臂213;臂215,转动自由地连结于臂214;以及臂216,转动自由地连结于臂215。并且,在臂216安装有末端执行器22。
[0017]
但是,机器人2的结构没有特别的限定,例如,臂的数量既可以是一个以上且五个以下,也可以是七个以上。另外,例如,机器人2也可以是水平多关节机器人、双臂机器人等。
[0018]
机器人2具有:驱动装置41,使臂211相对于基座20转动;驱动装置42,使臂212相对于臂211转动;驱动装置43,使臂213相对于臂212转动;驱动装置44,使臂214相对于臂213转动;驱动装置45,使臂215相对于臂214转动;以及驱动装置46,使臂216相对于臂215转动。这些驱动装置41至46分别由控制装置3独立控制。
[0019]
控制装置3接收来自未图示的主计算机的位置指令,独立控制驱动装置41至46的驱动,以使各臂211至216处于与上述位置指令相应的位置。控制装置3例如由计算机构成,具有:处理器(cpu),处理信息;存储器,以能够通信的方式与处理器连接;以及外部接口。另外,能够通过处理器执行的各种程序保存于存储器中,处理器能够读取并执行存储于存储器中的各种程序等。
[0020]
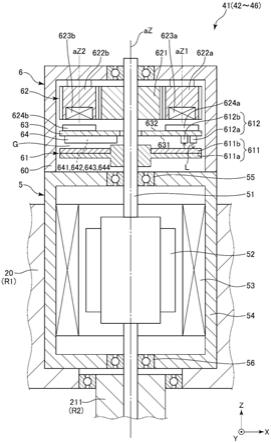
接下来,对驱动装置41至46进行说明,但由于驱动装置41至46是彼此相同的结构,因此以下以驱动装置41为代表进行说明,而省略对其他的驱动装置42至46的说明。如图2所示,驱动装置41具有:电机5;以及编码器单元6,检测电机5的旋转轴的旋转状态。
[0021]
电机5是两相ac无刷电机、三相ac无刷电机、三相同步电机等各种电机。电机5具有:旋转轴51,沿着与z轴平行的轴线az配置;转子52,固定于旋转轴51;定子53,配置于转子52的周围;筒状的外壳54,收纳这些并支承定子53;以及轴承55、56,将旋转轴51支承为能够
相对于外壳54围绕轴线az旋转。另外,外壳54固定于作为第一部件r1的基座20。另外,在旋转轴51的与编码器单元6相反一侧的端部连接有作为第二部件r2的臂211。由此,电机5的输出从基座20传递至臂211,臂211相对于基座20转动。需要说明的是,旋转轴51也能够根据需要经由减速器等齿轮装置而连接于臂211。
[0022]
编码器单元6配置于电机5的上侧即 z轴侧。编码器单元6具有:旋转角度检测型的光学式编码器61;多旋转检测型的磁式编码器62;以及基板63。并且,这些收纳在固定于外壳54的外壳60内。另外,从电机5侧起以光学式编码器61、基板63、磁式编码器62的顺序沿着z轴配置。也就是说,光学式编码器61位于最-z轴侧,磁式编码器62位于最 z轴侧,基板63位于光学式编码器61与磁式编码器62之间。
[0023]
光学式编码器61是反射型的光学式编码器,具有:光学标尺611,固定于电机5的旋转轴51;以及光学传感器612,检测光学标尺611的旋转状态。光学标尺611与旋转轴51共同围绕轴线az旋转。光学标尺611具有:毂611a,固定于电机5的旋转轴51;以及盘611b,固定于毂611a。在盘611b的上表面,形成有能够检测盘611b的旋转角度、旋转速度的未图示的检测用图案。作为检测用图案,不作特别限定,例如,能够列举沿着以轴线az为中心的周向光反射率不同的两个区域、即交替排列了反射区域和非反射区域而得的图案。
[0024]
光学传感器612与盘611b分离地配置于盘611b的上侧。光学传感器612具有:发光元件612a,朝向盘611b上的检测用图案射出光l;以及受光元件612b,接收在检测用图案反射的光l。发光元件612a例如是激光二极管、发光二极管,受光元件612b例如是光电二极管。在如这样结构的光学式编码器61中,随着盘611b围绕轴线az旋转,来自受光元件612b的输出信号的波形发生变化。因此,能够基于该输出信号,检测盘611b的360
°
范围内的旋转角度θ。
[0025]
通过将光学式编码器61设为反射型的光学式编码器,其结构变得简单。另外,通过设为反射型,能够将发光元件612a和受光元件612b集中配置于光学标尺611的一侧,因此,例如与以夹着光学标尺611的方式配置发光元件612a和受光元件612b、且受光元件612b接收从发光元件612a射出并透过光学标尺611的光的透过型的光学式编码器相比,能够实现光学式编码器61的薄型化。但是,作为光学式编码器61,不限定于反射型的光学式编码器,例如,也能够是通过使用了拍摄元件的模板匹配来检测旋转角度θ的拍摄型的光学式编码器。在这种情况下,将发光元件612a用作检测用图案的照明,配置摄像机等拍摄元件来代替受光元件612b即可。
[0026]
磁式编码器62配置于光学传感器612的上侧即 z轴侧。磁式编码器62具有:主齿轮621,固定于旋转轴51;两个副齿轮622a、622b,与主齿轮621啮合;磁铁623a、623b,固定于副齿轮622a、622b;以及磁传感器624a、624b,检测磁铁623a、623b的旋转状态。
[0027]
主齿轮621与旋转轴51共同围绕轴线az旋转。副齿轮622a被轴支承为能够围绕与轴线az平行的轴线az1旋转,并从动于主齿轮621以与主齿轮621的齿轮比对应的旋转量进行旋转。同样地,副齿轮622b被轴支承能够围绕与轴线az平行的轴线az2旋转,并从动于主齿轮621以与主齿轮621的齿轮比对应的旋转量进行旋转。主齿轮621、副齿轮622a、以及副齿轮622b的齿数彼此不同,特别是在本实施方式中为互质关系。另外,副齿轮622a、622b隔着主齿轮621而相对配置,副齿轮622a位于主齿轮621的 x轴侧,副齿轮622b位于主齿轮621的-x轴侧。但是,副齿轮622a、622b的配置没有特别限定。
[0028]
磁铁623a固定于副齿轮622a。因此,磁铁623a与副齿轮622a共同围绕轴线az1旋转。同样地,磁铁623b固定于副齿轮622b。因此,磁铁623b与副齿轮622b共同围绕轴线az2旋转。磁铁623a、623b例如是钕磁铁、铁氧体磁铁、钐钴磁铁、铝镍钴磁铁、粘结磁铁等永磁铁,配置为磁场的方向随着围绕轴线az1、az2的旋转而变化。
[0029]
磁传感器624a、624b配置于磁铁623a、623b的下侧即-z轴侧。其中,磁传感器624a与磁铁623a相对配置,输出与磁铁623a的磁场的方向即副齿轮622a的360
°
范围内的旋转角度相应的信号。另一方面,磁传感器624b与磁铁623b相对配置,输出与磁铁623b的磁场的方向即副齿轮622b的360
°
范围内的旋转角度相应的信号。在如这样的结构的磁式编码器62中,能够通过来自磁传感器624a、624b的信号的值的组合来检测旋转轴51的转速n。
[0030]
需要说明的是,在本实施方式中,具备两个包括副齿轮、磁铁、以及磁传感器的单元,但是单元的数量不限定于此,也能够是三个以上。
[0031]
由此可见,在具有光学式编码器61以及磁式编码器62的编码器单元6中,基于磁式编码器62的输出来检测电机5的旋转轴51的转速n,基于光学式编码器61的输出来检测360
°
范围内的旋转轴51的旋转角度θ。并且,能够根据转速n以及旋转角度θ来检测旋转轴51的旋转量。
[0032]
基板63配置于光学式编码器61与磁式编码器62之间。具体而言,基板63配置于光学式编码器61的光学标尺611与磁式编码器62的磁铁623a、623b之间。基板63是布线基板,固定于外壳60。另外,在基板63的下表面631,与光学标尺611相对地安装有光学传感器612,在上表面632,与磁铁623a、623b相对地安装有磁传感器624a、624b。由此可见,与如以往的将光学传感器612以及磁传感器624a、624b安装于不同的基板的结构相比,通过将光学传感器612以及磁传感器624a、624b安装于一块基板63,基板的数量减少,能够实现编码器单元6的小型化、特别是z轴方向的薄型化。
[0033]
另外,由于将下表面631作为光学传感器612的安装面,将上表面632作为磁传感器624a、624b的安装面,也就是说,由于将光学传感器612以及磁传感器624a、624b安装于不同的面,因此能够防止光学传感器612与磁传感器624a、624b之间的干扰。因此,能够发挥高设计自由度。
[0034]
另外,通过在下表面631安装光学传感器612,能够将光学传感器612配置于相对于光学标尺611的适当的位置。因此,能够高精度地检测旋转轴51的旋转角度θ。同样地,通过在上表面632安装磁传感器624a、624b,能够将磁传感器624a、624b配置于相对于磁铁623a、623b的适当的位置。因此,能够高精度地检测旋转轴51的转速n。
[0035]
另外,在基板63的下表面631的不与光学传感器612重叠的位置上,安装有电路元件64。电路元件64与光学传感器612以及磁传感器624a、624b电连接。电路元件64例如是微型计算机,具有:旋转角度检测电路641,基于光学传感器612的输出信号检测旋转角度θ;转速检测电路642,基于磁传感器624a、624b的输出信号检测转速n;旋转量计算电路643,基于旋转角度检测电路641检测出的旋转角度θ以及转速检测电路642检测出的转速n,计算旋转轴51的旋转量;以及接口电路644,进行与外部的通信。电路元件64根据来自控制装置3的请求,计算旋转轴51的旋转量并发送至控制装置3。由此可见,通过在下表面631安装电路元件64,能够在形成于光学标尺611与基板63之间的结构上所需的间隙g配置电路元件64。因此,能够有效利用间隙g,能够实现编码器单元6的小型化。
[0036]
但是,作为电路元件64的结构,只要能够输出与旋转轴51的旋转量对应的信号即可,并不特别限定。另外,电路元件64既能够省略,也能够安装于基板63的上表面632,也能够不分外壳60的内外,安装于基板63以外。
[0037]
另外,如图3所示,在基板63的上表面632安装有连接器65。另外,连接器65的插入口651露出在外壳60的外部。并且,控制装置3和电路元件64经由连接器65而电连接。另外,连接器65配置为在从z轴方向俯视观察时,不与副齿轮622a、622b重叠。在本实施方式中,副齿轮622a、622b相对于主齿轮621被配置于
±
x轴侧,因此连接器65相对于主齿轮621被配置于 y轴侧。由此可见,通过在基板63的上表面632安装连接器65,容易使插入口651从外壳60的上表面露出,使插入口651朝向上侧即 z轴侧。因此,容易靠近插入口651。特别是,由于电机5配置于编码器单元6的下侧,因此电机5不会妨碍靠近插入口651。
[0038]
另外,在从z轴方向俯视观察时,连接器65与光学标尺611重叠。由此,能够抑制编码器单元6的大径化。
[0039]
以上,对机器人系统1进行了说明。适用于这样的机器人系统1的编码器单元6具有:磁式编码器62,具有固定于旋转轴51的主齿轮621、与主齿轮621啮合的多个副齿轮622a、622b、配置于副齿轮622a、622b的磁铁623a、623b、以及对应的磁铁623a、623b的磁场所作用的多个磁传感器624a、624b;光学式编码器61,在旋转轴51的轴向上与磁式编码器62分离地配置,并具有固定于旋转轴51的光学标尺611、以及接收由光学标尺611反射的光l的光学传感器612;以及基板63,配置于磁铁623a、623b与光学标尺611之间,在作为一个面的上表面632上安装有磁传感器624a、624b,在作为另一个面的下表面631上安装有光学传感器612。
[0040]
由此可见,与如以往的将光学传感器612以及磁传感器624a、624b安装于不同的基板的结构相比,通过将光学传感器612以及磁传感器624a、624b安装于同一基板63,从而基板的数量减少,相应地,能够实现编码器单元6的薄型化。另外,通过将光学传感器612以及磁传感器624a、624b安装于不同的面,能够防止光学传感器612以及磁传感器624a、624b的干扰。因此,能够发挥高设计自由度。
[0041]
另外,如上所述,在基板63的磁铁623a、623b侧的面即上表面632上安装有磁传感器624a、624b,在光学标尺611侧的面即下表面631上安装有光学传感器612。由此可见,通过在下表面631安装光学传感器612,能够将光学传感器612配置于相对于光学标尺611的适当的位置。因此,能够高精度地检测旋转轴51的旋转角度θ。同样地,通过在上表面632安装磁传感器624a、624b,能够将磁传感器624a、624b配置于相对于磁铁623a、623b的适当的位置。因此,能够高精度地检测旋转轴51的转速n。
[0042]
另外,如上所述,编码器单元6具有安装在基板63的磁铁623a、623b侧的面即上表面632的连接器65。通过具有连接器65,容易与控制装置3进行电连接。另外,能够有效利用上表面632的不与主齿轮621、副齿轮622a、622b重叠的区域,能够避免编码器单元6的大型化而配置连接器65。
[0043]
另外,如上所述,在俯视观察基板63即沿z轴方向俯视观察时,连接器65与光学标尺611重叠。由此,能够抑制编码器单元6的大径化。
[0044]
另外,如上所述,编码器单元6具有安装于基板63的光学标尺611侧的面即下表面631,且与光学传感器612以及磁传感器624a、624b电连接的电路元件64。由此,能够有效利
用下表面631与光学标尺611之间的间隙g,能够实现编码器单元6的小型化。
[0045]
另外,如上所述,光学传感器612是具有朝向光学标尺611照射光l的发光元件612a、以及接收由光学标尺611反射的光l的受光元件612b的反射型光学编码器。由此,能够将发光元件612a以及受光元件612b相对于光学标尺611配置于同一侧,因此能够实现光学式编码器61的薄型化。
[0046]
另外,如上所述,应用于机器人系统1的驱动装置41具有编码器单元6、以及具有旋转轴51的电机5。由此,能够享受编码器单元6的效果。因此,能够实现驱动装置41的小型化。
[0047]
另外,如上所述,电机5配置于编码器单元6的光学标尺611侧。由此,能够不受电机5妨碍地进行与连接器65的连接。因此,容易进行驱动装置41与控制装置3的电连接。
[0048]
另外,如上所述,应用于机器人系统1的机器人2具有作为第一部件r1的基座20和相对于第一部件r1位移的作为第二部件r2的臂211、以及使臂211相对于基座20位移的驱动装置41。由此,能够享受编码器单元6的效果。因此,能够实现机器人2的小型化。
[0049]
以上,虽然基于图示的实施方式对本发明的编码器单元、驱动装置以及机器人进行了说明,但本发明并不限定于此,各部的构成能够替换为具有相同功能的任意的构成。另外,本发明中还能够附加任意的构成物。另外,在上述实施方式中,虽然对将编码器单元以及驱动装置应用于机器人的例子进行了说明,但编码器单元以及驱动装置也能够应用于机器人以外的各种电子设备。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。