具有注入通道的外科手术器械引导件
1.本技术是于2017年7月12日提交的名称为“具有注入通道的外科手术器械引导件”的中国专利申请201780043125.4(pct/us2017/041787)的分案申请。
2.相关申请的交叉引用
3.本技术依据35u.s.c.119(e)要求2016年7月13日提交的美国临时申请no.62/361,931的权益,该申请通过引用整体并入本文。
技术领域
4.本发明的实施例涉及内窥镜外科手术器械领域,并且具体地涉及用于内窥镜外科手术器械的器械引导件,该器械引导件包括用于引入注入气体的通道。
背景技术:
5.已经使用微创医疗技术来减少在诊断或外科手术过程中可能被损坏的无关组织的量,从而减少患者恢复时间、不适和有害的副作用。传统形式的微创外科手术包括内窥镜检查。内窥镜检查的一种常见形式是腹腔镜检查,其是腹腔内的微创检查或外科手术。在传统的腹腔镜外科手术中,患者的腹腔注入有气体,并且套管套穿过患者腹部肌肉组织中的小(约12mm)切口,以提供进入端口,腹腔镜外科手术器械可以以密封方式穿过该进入端口。
6.腹腔镜外科手术器械通常包括用于观察外科手术区域的腹腔镜和具有末端执行器的外科手术器械。典型的外科手术工具包括例如夹子、抓紧器、手术剪、吻合器和持针器。该外科手术器械类似于常规(开放式)外科手术中使用的外科手术器械,除了每个外科手术器械的末端执行器通过大约30cm长的延伸管与其手柄分开之外,例如,以便允许操作者将末端执行器引入外科手术部位,并从患者体外控制末端执行器相对于外科手术部位移动。
7.为了进一步减少微创外科手术的创伤,正在开发的技术允许仅使用单个进入端口(例如单个切口或单个自然身体孔口)进入身体的微创外科手术。这种进入可以通过使用稍大的套管来完成,该套管可以容纳外科手术所需的所有器械。通过单个切口或自然孔口进行的微创外科手术可以称为单孔进入(spa)外科手术。提供单个端口的单个套管可以通过身体孔口或通过切口引入。
8.如果通过单个套管将多个外科手术器械和/或相机器械引入到外科手术部位,则希望使用尽可能小的套管,套管的尺寸与要穿过该套管的器械的尺寸一致。还必须提供通路以供应注入气体以使外科手术部位充气并且持续地更换泄漏损失的气体。通路还可以允许排空外科手术部位。
9.因此,需要一种更好和更有效的装置,以用于通过小切口引入外科手术器械并向外科手术部位供应注入气体。
附图说明
10.通过参考以下描述和附图可以最好地理解本发明,该描述和附图用于通过示例而非限制的方式示出本发明的实施例。在附图中,相同的附图标记表示类似的元件:
11.图1是说明性远程操作的外科手术系统的视图。
12.图2是未组装的进入端口的示意图。
13.图3是组装的进入端口的侧视图,其中套管的一部分被切除以示出插入套管中的器械引导件。
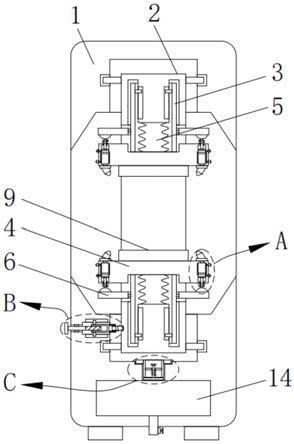
14.图4是沿图3中的线4-4截取的器械引导件的横截面。
15.图5a是沿图3中的线5-5截取的器械引导件的横截面。
16.图5b是沿图3中的线5-5截取的器械引导件的放大横截面。
17.图6是插入套管中的器械引导件的示意性侧视图,以示出注入气体的流动。
具体实施方式
18.在以下描述中,阐述了许多具体细节。然而,应该理解的是,可以在没有这些具体细节的情况下实践本发明的实施例。在其他情况下,没有详细示出公知的电路、结构和技术,以免模糊对本说明书的理解。
19.在以下描述中,对示出本发明的若干实施例的附图进行了参考。应该理解的是,可以利用其他实施例,并且可以在不脱离本公开的精神和范围的情况下进行机械组成、结构、电气和操作变化。以下详细描述不应被视为具有限制意义,并且本发明的实施例的范围仅由所公布的专利的权利要求书限定。
20.本文所使用的术语仅用于描述特定实施例的目的,并不旨在限制本发明。本文可以使用空间相对术语(例如,“下方”、“下面”、“下部”、“上面”、“上部”等)以便于描述,以描述如图所示的一个元素或特征件与另一个或多个元素或特征件的关系。应该理解的是,空间相对术语旨在包括使用或操作中的装置的除了图中所示的取向之外的不同取向。例如,如果图中的装置被翻转,则被描述为在其他元件或特征件“下面”或“下方”的元件将被定向在其他元件或特征件“上面”。因此,示例性术语“下面”可以包括上面和下面两个取向。装置可以以其他方式定向(例如,旋转90度或在其他方位),并且相应地解释本文使用的空间相对描述符。
21.如本文所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文另有说明。将进一步理解的是,术语“包括”和/或“包含”指定所陈述的特征、步骤、操作、元件和/或组件的存在,但不排除存在或添加一个或多个其他特征、步骤、操作、元件、组件和/或其组。
22.术语“对象”通常是指组件或组件组。例如,对象可以指代说明书或权利要求书中的盘的口袋或凸台。在整个说明书和权利要求书中,术语“对象”、“组件”、“部分”、“部件”和“片段”可以互换使用。
23.本文所使用的术语“或”和“和/或”应解释为包含性的或意指任何一个或任何组合。因此,“a、b或c”或“a、b和/或c”表示“以下任何一种:a;b;c;a和b;a和c;b和c;a、b和c”。只有当元件、功能、步骤或行为的组合在某种程度上固有地相互排斥时,才会出现此定义的例外情况。
24.本文所用的近似术语(例如,“基本上”和“约”)应被解释为等于公差内的规定量,该公差适用于产生规定量的制造过程或适用于规定量的使用或要求。因此,如果长度通过精确的过程产生或代表临界尺寸,则基本上为规定量的长度可以是规定量加上或减去一个
小的量。相反,如果长度由不精确的过程产生或代表非临界尺寸,则基本上为规定量的长度可以是规定量加上或减去一个大的量。
25.术语“器械”和“外科手术器械”在本文中用于描述配置成插入患者体内并用于执行外科手术或诊断过程的医疗装置。外科手术器械通常包括与一个或多个外科手术任务相关联的末端执行器,例如钳子、针驱动器、剪刀、双极烧灼器、组织稳定器或牵引器、施夹器、吻合装置、成像装置(例如,内窥镜或超声探头)等。与本发明的实施例一起使用的一些器械还提供用于外科手术工具的铰接支撑件(有时称为“腕部”),因此,可以利用相对于器械的轴的一个或多个机械自由度来操纵外科手术工具的位置和取向。此外,许多外科手术末端执行器包括功能性机械自由度,例如打开或关闭的钳口,或沿路径平移的刀。外科手术器械还可以包含存储的(例如,在器械内部的半导体存储器上)信息,该信息可以是永久性的或者可以由外科手术系统更新。因此,该系统可以提供器械与一个或多个系统组件之间的单向或双向信息通信。
26.图1示出了使用用于远程操作的外科手术器械102、104、106的单个进入端口100在患者110上的微创远程操作的外科手术过程的视图。单个进入端口100通过单个切口112插入。通常,通过单个进入端口100引入包括相机器械的三个或四个外科手术器械(示出了器械102、104和106)。另外,通常会有在单个进入端口100处或其附近引入注入气体(例如二氧化碳(co2))的措施。应当理解的是,单个端口外科手术使用位于少量空间中的大量设备。
27.远程操作的外科手术器械102、104和106(其可以包括可以提供外科手术部位和外科手术部位处的其他器械的图像的相机器械)各自耦接到对应的致动器(例如,致动器122、124、126和128之一)。致动器122、124、126和128是伺服致动器,其允许外科医生使用计算机介导的控制站120操纵外科手术器械。这些操纵可以包括诸如改变外科手术器械的末端执行器(包括相机)的位置和取向以及操作末端执行器(诸如闭合钳口以实现抓握、切割等)的功能。外科手术器械的这种致动器控制可以通过各种术语(例如远程操作的外科手术)来指代。致动器122、124、126和128可以支撑在单独的结构臂上,一旦定位,该结构臂可以相对于患者110固定。在各种实施方式中,支撑臂可以手动定位,可以由外科医生定位,或者可以在外科医生移动一个或多个外科手术器械时由系统自动定位。
28.控制系统将计算机介导的控制站120耦接到远程操作的致动器122、124、126和128。这里“计算机”广泛地包括数据处理单元,该数据处理单元包括存储器和加法或逻辑功能,例如算术逻辑单元,该加法或逻辑功能可编程以执行算术或逻辑运算。控制系统可以协调输入装置的移动与其相关联的外科手术器械的移动,使得如向外科医生显示的外科手术器械102、104、106的图像看起来至少基本上连接到外科医生手中的输入装置。还经常提供进一步的连接水平以增强外科医生的灵活性和外科手术器械102、104和106的易用性。
29.计算机介导的控制站120可以提供手动操作的主控制器130,该主控制器130允许通过将信号(诸如由缆线132提供的电学控制信号或光学控制信号)传输到致动器122、124、126和128来操纵远程操作的外科手术器械102、104、106,致动器122、124、126和128控制耦接的外科手术器械102、104和106的动作。通常,外科手术器械之一(例如,外科手术器械102)将是相机器械,其被操纵以将剩余的外科手术器械和被操纵的对象放置在相机的视野内。相机器械将信号传输到控制站120,使得由相机捕获的视野内的器械和对象的图像可以显示在视觉显示器134上,当操纵耦接的外科手术器械104、106时,外科医生观察该视觉显
示器134。手动操作的控制器130和视觉显示器134可以被布置成提供对外科手术器械104、106的直观控制,其中器械以类似于操作者的手随控制器一起移动的方式进行移动。
30.图2是未组装的套管和器械引导件组装件的示意图,套管和器械引导件组装件形成可以通过切口112插入的进入端口100。在将部件组装成在外科手术过程中使用的配置之前示出了进入端口100。当组装时,套管和器械引导件组装件提供图1中所示的单个端口进入。
31.进入端口100包括套管200,套管200具有管腔或管202,管腔或管202通过切口112插入以分离和保护切口。进入端口100还包括插入套管200中的器械引导件220。器械引导件220可以以各种方式耦接到套管200,以在外科手术过程中将器械引导件保持在套管中。器械引导件220引导一个或多个器械通过套管200,以便于器械进入外科手术部位。
32.套管200包括具有注入端口206的近侧部分204和耦接到近侧部分的管202。注入端口206接收注入气体(例如二氧化碳(co2)),注入气体通过套管200的管202部分引入到外科手术部位。
33.进入端口100可以包括耦接到套管200的密封组装件210。当器械引导件220未插入套管200中时,密封组装件210密封进入端口100以减少注入气体的损失。
34.器械引导件220可以连结到漏斗组装件230,漏斗组装件230提供器械接收器232以在器械引导件的近端处将器械引导到器械引导件中的通路中。漏斗组装件230可以包括密封件,该密封件密封器械引导件220中的器械通路,以在器械未插入器械通路中时减少注入气体的损失。器械引导件220可以包括一个或多个器械通路。器械引导件可以包括一个、两个、三个、四个、五个、六个或更多个器械通路。器械通路可以全部具有相同的尺寸和形状,或者它们的尺寸和/或形状可以不同。每个器械通路可以具有圆形横截面或椭圆形横截面或与由器械通路支撑的器械轴的形状相对应的其他横截面形状。
35.器械引导件220的远侧部分被配置为紧密地配合在套管200的管202部分内。器械引导件220中的一个或多个器械通路中的每一个被配置为在套管200内的限定位置处支撑单个外科手术器械。外科手术器械通过漏斗组装件230中的器械接收器232插入进入端口100,使得它们在器械引导件220的近端处被引导到器械通路中。外科手术器械由器械通路支撑,直到它们从器械引导件220的远端伸出。在一些实施例中,器械引导件220可以由非导电材料形成,以帮助电隔离器械,器械可以携带用于电外科手术应用(例如,烧灼)的电荷。在其他实施例中,器械引导件220可以由导电材料(例如金属或导电塑料)形成,以帮助消散可能积聚在穿过引导件的器械上的任何电荷。
36.在一些实施例中,套管200可以是可重复使用的(例如,在清洁和消毒之后)。器械引导件220、漏斗组装件230和密封组装件210中的一些或全部可以被提供为无菌的一次性套件(例如,伽马(gamma)灭菌套件),使得可以针对每个外科手术过程使用新的器械引导件、新的漏斗组装件和/或新的密封组装件。
37.图3示出了进入端口100的侧视图,其中套管200沿直径切开以示出插入套管中的器械引导件220。器械引导件220包括在器械引导件的外壁的外表面222上的至少一个通道224,以形成用于从注入端口206到套管200的管202部分的远端的注入气体的通路。
38.通道224邻近管202的内表面,以在器械引导件220插入管时形成用于注入气体的通路。通道224完全延伸到器械引导件220的远端300。通道224朝向器械引导件220的近端延
伸但不到达器械引导件220的近端。通道224朝向近端充分延伸,以使通道的近端302接收从注入端口206流出并穿过套管200的近侧部分204的注入气体。
39.密封组装件210可以包括近侧密封件306和密封翼片(flaps)304。近侧密封件306将器械引导件220密封超过通道224的近端302,以防止注入气体在套管200的近端处从器械引导件逸出。当器械引导件220插入管202中时,密封翼片304打开。虽然密封翼片304看起来阻止注入气体从注入端口206流到通道的近端302,但是在翼片之间存在开口,其允许注入气体流过套管200的近侧部分204。因此,进入端口100的套管和器械引导件组装件提供了用于将注入气体引入外科手术部位中的机构,同时使来自组装件的注入气体的损失最小化。
40.图4是沿剖面线4-4截取的器械引导件220的横截面。图5a和图5b是沿剖面线5-5截取的器械引导件220的横截面。图5a省略了图5b的放大视图中所示的通道端视图的细节。
41.有必要提供足以将外科手术区域充气至设定压力(可能为8mm hg至14mm hg)并且更换泄漏引起的气体损失的注入气体的流量。可以在约15mm hg(约2,000pa)的压力下供应注入气体。流量可以是约20l/min。应该理解的是,流过一个或多个通道224的注入气体的速度取决于通道的横截面积。当横截面积小时,流动将具有更高的速度,而当横截面积大时,流动将具有更低的速度。但是希望一个或多个通道224具有小的横截面积,以使器械引导件220和套管的管202的直径最小化。一个或多个通道224的横截面积受到为了器械引导件220的结构完整性和可制造性而保持一定壁厚度的需要的约束。
42.还希望避免注入气体的高速流动,高速流动可能干扰或甚至损坏套管200的远端附近的组织,其中注入气体被排放到外科手术部位。为了在最小化注入气体的排放速度的同时提供小直径的器械引导件220,一个或多个通道224在通道的近端处具有第一横截面积,并且在通道的远端处具有第二横截面积,第二横截面积大于第一横截面积。
43.一个或多个通道224具有用于通道的大部分长度的第一横截面积。过渡部分308开始于靠近通道224的远端,以提供到第二横截面积的过渡。过渡制作得足够长,以避免在注入气体的流动中引入湍流。在一些实施例中,从第一横截面积到第二横截面积的过渡长约1英寸(25mm)。通过将较大的横截面积限制到器械引导件220的远端300,较大的横截面积的不利后果被最小化。这允许器械引导件220具有比如果通道224在其整个长度上具有第二横截面积将可能具有的直径更小的直径。在一些实施例中,第二横截面积是第一横截面积的至少两倍,从而将注入气体的排放速度减小到通道近端处的速度的一半或更小。例如,在一个实施例中,第一横截面积约为0.0023平方英寸(1.5平方毫米),并且第二横截面积约为0.0050平方英寸(3.0平方毫米)。
44.一个或多个通道224相对于内部过道定位,以在通道具有第一横截面积处为器械引导件提供第一壁厚度,并且在至少一个通道具有第二横截面积处为器械引导件提供第二壁厚度,第二壁厚度小于第一壁厚度。
45.图6示出了插入套管200中的器械引导件220的示意性侧视图,以示出注入气体从注气端口206到外科手术部位602的流动。双虚线箭头表示注入气体600的流动。套管200通过切口112插入,切口112抵靠套管的外部进行密封。套管200的近侧部分204形成供应注入气体的气室。近侧部分204在近端处由抵靠器械引导件220密封的近侧密封件306密封。
46.注入气体从由套管200的近侧部分204形成的气室进入器械引导件220的外表面222上的一个或多个通道224,并且朝向器械引导件的远端300流动。一个或多个通道224包
括过渡部分308,过渡部分308在通道的远端300处具有增加的横截面积。如通过过渡部分308中的双虚线箭头的减小的长度所表明的,在注入气体被排放到外科手术部位602之前,过渡部分的增加的横截面积降低了注入气体的速度。
47.虽然已经在附图中描述和示出了某些示例性实施例,但是应该理解,这些实施例仅仅是对本发明的说明而非限制,并且本发明不限于所示和所描述的具体结构和布置,因为本领域普通技术人员可以想到各种其他修改。例如,虽然已经描述了使用器械引导件的通道来将注入气体输送到外科手术部位,但是可以使用相同或类似的通道从外科手术部位排出气体和/或烟雾。因此,该描述被认为是说明性的而非限制性的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。