技术特征:
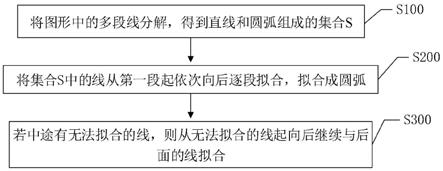
1.一种图形平滑方法,其特征在于,包括如下步骤:a、将图形中的多段线分解,得到直线和圆弧组成的集合s;b、将集合s中的线从第一段起依次向后逐段拟合,拟合成圆弧;c、若中途有无法拟合的线,则从无法拟合的线起向后继续与后面的线拟合。2.根据权利要求1所述的图形平滑方法,其特征在于,所述步骤b具体包括:b1、从集合s中的第一段线开始遍历集合s中的线,若线的长度小于预设的长度阈值,则视为无效段,继续遍历,若线的长度大于等于预设的长度阈值,则视为有效段,将该段线添加到集合r中,该段线记为l;b2、取集合r中的线l以及集合s中位于线l之后的线e进行拟合,若能拟合,得到拟合后的圆弧;b3、判断拟合后的圆弧是否符合误差要求,若符合,则拟合成功,将线e从集合s中移除,将线l从集合r中移除,将拟合圆弧添加到集合r中,将集合r中的拟合圆弧继续与集合s中线e之后的线进行拟合;若不符合,则拟合失败,保留集合r中的线l,将集合s中的线e添加到集合r中,取集合r中的线e与集合s中位于线e之后的线继续拟合。3.根据权利要求2所述的图形平滑方法,其特征在于,所述b2具体包括:b21、取线l的起点p1、中点p2及终点p3,取线e的中点p4及终点p5,判断p1是否等于p5,如果等于,则求出点p1、p2、p3、p4及p5的最小外接矩形r,矩形r的内切圆即为线l与线e拟合后的圆弧。4.根据权利要求3所述的图形平滑方法,其特征在于,所述b2还包括:b22、用点p2、p3及p4中每一个点分别与点p1及点p5求圆弧,求得三个圆弧,求出每个圆弧的凸度,并计算凸度的平均值t,以点p1、p5及凸度平均值t求出结果圆弧。5.根据权利要求4所述的图形平滑方法,其特征在于,所述b3具体包括:b31、判断拟合圆弧与原图的差异度是否符合要求,以及判断拟合圆弧是否符合拟合精度要求;b32、若均符合,则判断拟合成功,将线e从集合s中删除,将线l从集合r中移除,将拟合圆弧添加到集合r中,将集合r中的拟合圆弧继续与集合s中线e之后的线进行拟合;b33、若其中一项不符合,则判断拟合失败,保留集合r中的线l,将集合s中的线e添加到集合r中,取集合r中的线e与集合s中位于线e之后的线继续拟合。6.根据权利要求5所述的图形平滑方法,其特征在于,所述b31具体包括:b311、判断拟合圆弧的长度与线e的长度之比是否大于比值阈值q,若大于,则说明拟合结果与原图形相差较大,判断拟合圆弧与原图的差异度不符合要求。7.根据权利要求5所述的图形平滑方法,其特征在于,所述b31还包括:b312、遍历点p1、p2、p3、p4及p5,若其中有一个点到拟合圆弧的距离大于精度m,则说明拟合结果误差较大,判断拟合圆弧不符合精度要求。8.根据权利要求2所述的图形平滑方法,其特征在于,还包括步骤:b4、遍历集合r中的每一段,如果是圆弧,则检查圆弧的中点到圆弧起点和终点之间的连线的距离是否小于精度m,若小于,则说明该段圆弧与直线较接近,将该段圆弧替换成直线。9.一种图形平滑设备,其特征在于,所述图形平滑设备包括:
一个或多个处理器;存储器,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如权利要求1-8中任一项所述的图形平滑方法。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-8中任一项所述的图形平滑方法。
技术总结
本申请公开了一种图形平滑方法、图形平滑设备及存储介质。图形平滑方法包括如下步骤:A、将图形中的多段线分解,得到直线和圆弧组成的集合S;B、将集合S中的线从第一段起依次向后逐段拟合,拟合成圆弧;C、若中途有无法拟合的线,则从无法拟合的线起向后继续与后面的线拟合。本申请的图形平滑方法能对图形中多段线的各段进行拟合,使图形更平滑,减少图形的控制点,简化图形,提升激光加工的效率。提升激光加工的效率。提升激光加工的效率。
技术研发人员:李俊吉 朱李成 李桂胜 封雨鑫 陈焱 高云峰
受保护的技术使用者:深圳市大族智能控制科技有限公司
技术研发日:2022.01.18
技术公布日:2022/5/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。