技术特征:
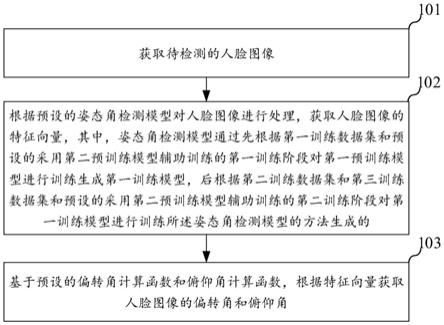
1.一种姿态角检测方法,其特征在于,所述方法包括:获取待检测的人脸图像;根据预设的姿态角检测模型对所述人脸图像进行处理,获取所述人脸图像的特征向量,其中,所述姿态角检测模型通过先根据第一训练数据集和预设的采用第二预训练模型辅助训练的第一训练阶段对第一预训练模型进行训练生成第一训练模型,后根据第二训练数据集和第三训练数据集和预设的采用所述第二预训练模型辅助训练的第二训练阶段对所述第一训练模型进行训练生成所述姿态角检测模型的方法生成的,所述第一训练数据集和所述第三训练数据集为无标注训练数据集,所述第二训练数据集为有标注训练数据集;基于预设的偏转角计算函数和俯仰角计算函数,根据所述特征向量获取所述人脸图像的偏转角和俯仰角。2.根据权利要求1所述的姿态角检测方法,其特征在于,所述根据第一训练数据集和预设的采用第二预训练模型辅助训练的第一训练阶段对第一预训练模型进行训练生成第一训练模型,包括:将所述第一训练数据集输入到所述第一预训练模型中进行处理,生成第一输出向量;对所述第一输出向量进行采样处理之后输入所述第二预训练模型中进行处理,生成第二输出向量;基于预设第一损失函数和预设第一优化函数,根据所述第一输出向量、所述第二输出向量和所述第二预训练模型的输入对所述第一预训练模型进行训练,生成所述第一训练模型。3.根据权利要求2所述的姿态角检测方法,其特征在于,所述基于预设第一损失函数和预设第一优化函数,根据所述第一输出向量、所述第二输出向量和所述第二预训练模型的输入对所述第一预训练模型进行训练,生成第一训练模型,包括:基于所述第一损失函数,根据所述第一输出向量和所述第二输出向量获取所述第一预训练模型损失值;基于所述第一优化函数,根据所述损失值对所述第一预训练模型进行训练,生成所述第一训练模型;其中,所述第一损失函数的表达式为:loss
(i)
为所述损失值,mu
n(i)
和var
n(i)
为所述第一输出向量,dx
(i)
为所述第二输出向量,x
(i)
为所述第一训练数据集中的第i个训练数据,z
n(i)
为所述第二预训练模型的输入,p(z
n(i)
)为的z
n(i)
概率密度函数,mse(a,b)为a和b的均方误差,kl(a||b)为a和b的kullback-leibler散度,α和β为大于0的超参数,n为大于2的超参数,n=1,2,3,
…
,n;所述第一优化函数的表达式为:4.根据权利要求1所述的姿态角检测方法,其特征在于,所述根据第二训练数据集、第三训练数据集和预设的采用所述第二预训练模型辅助训练的第二训练阶段对所述第一训
练模型进行训练生成所述姿态角检测模型,包括:将所述第二训练数据集输入到所述第一训练模型中,生成第三输出向量,并根据所述第三输出向量生成第一向量值和第二向量值;将所述第三训练数据集输入到所述第一训练模型中进行处理,生成第四输出向量;对所述第四输出向量进行所述采样处理之后输入所述第二预训练模型中进行处理,生成第五输出向量;基于预设第二损失函数和预设第二优化函数,根据所述第一向量值、所述第二向量值、所述第二预训练模型的输入、所述第四输出向量和所述第五输出向量对所述第一训练模型进行训练,生成所述姿态角检测模型。5.根据权利要求4所述的姿态角检测方法,其特征在于,所述第二训练数据集包括同俯仰角不同偏转角数据集和同偏转角不同俯仰角数据集,所述第三输出向量包括偏转角特征向量和俯仰角特征向量;所述将所述第二训练数据集输入到所述第一训练模型中,生成第三输出向量,并根据所述第三输出向量生成第一向量值和第二向量值,包括:将所述同俯仰角不同偏转角数据集输入到所述第一训练模型中,生成所述偏转角特征向量;将所述同偏转角不同俯仰角数据集输入到所述第一训练模型中,生成所述俯仰角特征向量;基于预设向量值函数,根据所述偏转角特征向量生成所述第一向量值,并根据所述俯仰角特征向量生成所述第二向量值;其中,所述向量值函数的表达式为:或ny为所述第一向量值,ymu
n(k)
为所述偏转角特征向量,np为所述第二向量值,pmu
n(k)
为所述俯仰角特征向量,其中,为*的k纬度方向的方差,为*向量最大值对应的脚标,k为大于0的超参数。6.根据权利要求4所述的姿态角检测方法,其特征在于,所述第二损失函数包含第一损失项和第二损失项;所述基于预设第二损失函数和预设第二优化函数,根据所述第一向量值、所述第二向量值、所述第二预训练模型的输入、所述第四输出向量和所述第五输出向量对所述第一训练模型进行训练,生成姿态角检测模型,包括:基于所述第一损失项,根据所述第二预训练模型的输入、所述第四输出向量和所述第五输出向量获取所述第一训练模型的第一损失值;基于所述第二损失项,根据所述第一向量值、所述第二向量值和所述第四输出向量和获取所述第一训练模型的第二损失值;基于所述第二损失函数,根据所述第一损失值和所述第二损失值获取所述第一训练模型的损失值;基于所述第二优化函数,根据所述损失值对所述第一训练模型进行训练,生成所述姿态角检测模型;
其中,所述第一损失项的表达式为:所述第二损失项的表达式为:所述第二损失函数的表达式为:所述第二优化函数的表达式为:loss
1(i)
为所述第一损失值,mu
n(i)
和var
n(i)
为所述第四输出向量,z
n(i)
为所述第二预训练模型的输入,dx
(i)
为所述第五输出向量,x
(i)
为所述第三训练数据集中的第i个训练数据,p(z
n(i)
)为的z
n(i)
概率密度函数,mse(a,b)为a和b的均方误差,kl(a||b)为a和b的kullback-leibler散度,loss2为所述第二损失值,为求向量最大值对应的脚标,ny为所述第一向量值,np为所述第二向量值,loss为所述损失值,α、β、μ、τ和γ为大于0的超参数。7.根据权利要求1至权利要求6中任一项所述的姿态角检测方法,其特征在于,所述方法还包括:获取指定偏转角训练数据集和指定俯仰角训练数据集;分别将所述指定偏转角训练数据集和所述指定俯仰角训练数据集输入到所述姿态角检测模型中进行处理,生成指定偏转角特征向量和指定俯仰角特征向量;基于预设点集构建方法,根据所述指定偏转角特征向量构建指定偏转角点集,并根据所述指定俯仰角特征向量构建指定俯仰角点集;将所述指定偏转角点集作为预设指定次数多项函数的输入,对所述指定次数多项函数进行最小二乘法拟合,生成所述偏转角计算函数;将所述指定俯仰角点集作为所述指定次数多项函数的输入,对所述指定次数多项函数进行最小二乘法拟合,生成所述俯仰角计算函数。8.一种姿态角检测系统,其特征在于,所述系统包括:第一获取模块、第二获取模块和第三获取模块;所述第一获取模块,用于获取待检测的人脸图像;所述第二获取模块,用于根据预设的姿态角检测模型对所述人脸图像进行处理,获取所述人脸图像的特征向量,其中,所述姿态角检测模型通过先根据第一训练数据集和预设的采用第二预训练模型辅助训练的第一训练阶段对第一预训练模型进行训练生成第一训练模型,后根据第二训练数据集和第三训练数据集和预设的采用所述第二预训练模型辅助训练的第二训练阶段对所述第一训练模型进行训练生成所述姿态角检测模型的方法生成的,所述第一训练数据集和所述第三训练数据集为无标注训练数据集,所述第二训练数据集为有标注训练数据集;所述第三获取模块,用于基于预设的偏转角计算函数和俯仰角计算函数,根据所述特征向量获取所述人脸图像的偏转角和俯仰角。9.一种电子设备,其特征在于,包括:
至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如权利要求1至7中任一项所述的姿态角检测方法。10.一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的姿态角检测方法。
技术总结
本申请涉及数据处理领域,公开一种姿态角检测方法、系统、电子设备及存储介质。姿态角检测方法包括:获取待检测的人脸图像;根据预设的姿态角检测模型对所述人脸图像进行处理,获取所述人脸图像的特征向量,其中,所述姿态角检测模型通过先根据第一训练数据集和预设的采用第二预训练模型辅助训练的第一训练阶段对第一预训练模型进行训练生成第一训练模型,后根据第二训练数据集和第三训练数据集和预设的采用所述第二预训练模型辅助训练的第二训练阶段对所述第一训练模型进行训练生成所述姿态角检测模型的方法生成的;基于预设的偏转角计算函数和俯仰角计算函数,根据所述特征向量获取所述人脸图像的偏转角和俯仰角。向量获取所述人脸图像的偏转角和俯仰角。向量获取所述人脸图像的偏转角和俯仰角。
技术研发人员:刘冲冲 付贤强 何武 朱海涛 户磊
受保护的技术使用者:合肥的卢深视科技有限公司
技术研发日:2022.01.17
技术公布日:2022/5/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。