技术特征:
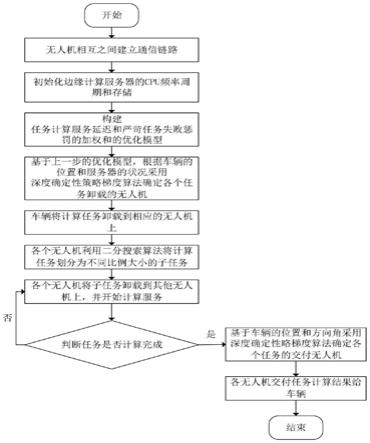
1.一种多无人机协作边缘计算方法,其特征在于:该方法包括以下步骤:s1:无人机相互之间建立通信链路;s2:初始化边缘计算服务器的cpu频率周期和存储;s3:构建任务计算服务延迟和严苛任务失败惩罚的加权和的优化模型;s4:基于优化模型,根据车辆的位置和服务器的状况采用深度确定性策略梯度算法确定各个任务卸载的无人机;s5:车辆将计算任务卸载到相应的无人机上;s6:各个无人机利用二分搜索算法将计算任务划分为不同比例大小的子任务;s7:各个无人机将子任务卸载到其他无人机上,并开始计算服务;s8:各个无人机判断边缘计算服务器上的任务是否计算完成,若计算任务完成执行s8,否则,执行s6;s9:基于车辆的位置和方向角采用深度确定性略梯度算法确定各个任务的交付无人机;s10:各无人机交付任务计算结果给车辆。2.根据权利要求1所述的一种多无人机协作边缘计算方法,其特征在于:所述s1中,无人机携带计算服务器,且无人机的总数目为n个,每个无人机的编号为n;无人机上的边缘计算服务器上具备相同大小的中央处理器周期频率缓存3.根据权利要求2所述的一种多无人机协作边缘计算方法,其特征在于:所述s2中,优化步骤包括以下步骤:s21:设所有无人机覆盖下的车辆的数目为u个,每个车辆的编号为u,每个车辆计算任务可以表征为其中为车辆在t时隙所需要的cpu计算周期数,为车辆在t时隙所需要的缓存资源大小,也为任务的数据量大小,表示该任务的服务质量qos需求,当时表示该任务为低优先级的计算任务,当时表示该任务为高优先级的计算任务;s22:车辆u的将计算任务卸载到无人机n上,其任务卸载的传输延迟为:其中代表车辆u将计算任务卸载至无人机n上,当则不卸载,r
u,n
为车辆u与无人机n之间的传输速率;s23:无人机将任务划分为不同大小的子任务,并将各个子任务卸载给其他无人机,其任务卸载的传输延迟为其中为划分为无人机n'的任务比例大小;s24:车辆u的各个子任务卸载到无人机n上,无人机上的边缘计算服务器计算时延为:其中为无人机n边缘计算服务器分给该任务的cpu周期频率;s25:车辆u的任务的总的服务延迟为
s23:为了保证任务被正确接收并成功交付,定义其惩罚函数为:s24:建立优化模型:其中t是系统的运行总时间,χ为任务计算卸载服务失败时的单位惩罚。4.根据权利要求3所述的一种多无人机协作边缘计算方法,其特征在于:所述s4中,深度确定性策略梯度算法包含四个神经网络;其中两个网络为评价网络,在训练神经网络时更新权值;另外两个网络为目标网络,在训练神经网络时定期从评价网络中替换权值;对于评价网络与目标网络,分别采用演员神经网络与评论家神经网络对最优策略和q值进行评价。5.根据权利要求1所述的一种多无人机协作边缘计算方法,其特征在于:所述s5中,深度确定性策略梯度算法的状态空间为:各个车辆任务的数据量大小,即每个车辆的速度与方向角{u
t,speed
,u
t,angle
};边缘服务器完成之前时间段内卸载任务的延迟深度确定性策略梯度算法的动作空间为:对于车辆u,任务的卸载无人机与结果交付无人机,即深度确定性策略梯度算法的成本模型为:全体车辆u的任务计算服务延迟和严苛任务失败惩罚的加权和,即:其中χ为任务计算卸载服务失败时的单位惩罚因子。6.根据权利要求5所述的一种多无人机协作边缘计算方法,其特征在于:所述s4中,深度确定性策略梯度算法为了得到长期的期望收益,其状态s的价值函数v为:其中γ
t
是与时间相关的的折现因子;通过最小化每个状态的价值函数,即得到最优的卸载π
*
,即:7.根据权利要求6所述的一种多无人机协作边缘计算方法,其特征在于:所述s4中,深度确定性策略梯度算法包括以下步骤:s41:设置算法的迭代次数;s42:初始化环境以及初始的状态;s43:选择一个动作察下一个状态s
t 1
和成本c(s
t
,a
t
);s44:将(s
t
,a
t
,s
t 1
)存放至经验回放缓冲区;若缓冲区已满,则删除最旧的(s
t
,a
t
,s
t 1
)元素;
s45:评价网络和目标网络的评论家神经网络都对权利要求5中的价值函数进行近似,并计算损失函数l,即:l(θ
q
)=e[(y
t-q(s
t
,a
t
|θ
q
))2],其中q(s
t
,a
t
|θ
q
)表示的是由评价网络近似得到的q函数,y
t
的值由目标网络近似的值函数得到,为y
t
=c(s
t
,a
t
) γq(s
t 1
,μ'(s
t 1
|θ
μ'
)|θ
q'
);s46:通过最小化步骤s45中的损失函数l,更新评价网络中评论家神经网络的权重;s47:根据中的抽样策略梯度更新评价网络中演员的权重;s48:判断是否到达迭代次数,达到则输出深度确定性策略梯度算法的网络,否则继续步骤s43-s48。8.根据权利要求7所述的一种多无人机协作边缘计算方法,其特征在于:所述s6中,二分搜索算法包括以下步骤:s61:从第一个无人机开始,测量该无人机与其他无人机之间的距离,并将距离表缓存至自己的内存中,计算该无人机与其他无人机之间的距离和;s62:从第一个无人机开始,将每个无人机收到的任务划分为等大小的两个子问题;s63:从第一个无人机开始,将第一份子任务保存在本地的缓存区中,第二份子任务根据其他无人机的距离与距离和之比进行划分成不同大小的子问题;s64:将不同的子问题卸载给步骤s63中相应的无人机上。
技术总结
本发明涉及一种多无人机协作边缘计算方法,属于边缘计算无人机领域。本发明中多架边缘计算无人机通过组网,构建成一个分布式的计算系统;预设每个无人机上边缘计算服务的中央处理器的周期频率、存储大小;以任务计算服务延迟和严苛任务失败惩罚的加权和最小为优化目标;采用深度确定性策略梯度算法确定各个任务卸载的无人机;采取深度确定性策略梯度算法确定各个任务计算结果的交付无人机,然后交付无人机任务计算结果反馈给用户。本方法充分考虑各个无人机上边缘计算服务器的任务负载状况、车辆的移动特性和任务对服务质量的需求,能够保证任务的及时交付。能够保证任务的及时交付。能够保证任务的及时交付。
技术研发人员:唐伦 吴壮 蒲昊 汪智平 陈前斌
受保护的技术使用者:重庆邮电大学
技术研发日:2022.03.01
技术公布日:2022/5/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。