1.本实用新型涉及风洞动导数试验技术领域,特别是涉及一种用于弹性铰链的校准装置。
背景技术:
2.动稳定性导数(简称动导数)是飞行器空气动力系数和力矩系数对飞行器无量纲旋转角速度和姿态角变化率的导数,是飞机、导弹等飞行器设计导航系统和控制系统以及对飞行器进行动态品质分析所必需的原始数据,动导数的准确预测对于飞行器气动设计、控制设计以及飞行安全具有重要的意义。风洞试验是获取动导数参数的重要地面试验手段,通常采用强迫振动法在某一自由度下模拟飞行器刚体运动模态来获取动导数,例如驱动模型绕自身轴线滚转振动可获得滚转方向动导数;驱动模型绕其质心偏航振动可获得偏航方向动导数;驱动模型绕其质心俯仰振动可获得俯仰方向动导数。
3.动导数风洞试验装置主要由激振系统、运动转换机构、动态天平和弹性铰链等组成。运动转换机构将激振系统提供的连续旋转运动转换为正弦往复振动;动态天平和弹性铰链实时记录往复振动过程中动态载荷和振动角位移的时间历程数据,通过数据处理即可得到动导数。
4.弹性铰链是动导数试验装置重要的部件之一,其功能是提供并约束模型在某一自由度下绕铰链中心作简谐振动。弹性铰链在驱动力的作用下产生角位移,元件产生应变,在弹性铰链元件上粘贴应变片组成的惠斯通全桥,将应变转换成电压信号。通常动导数试验角位移振幅在0.5
°
~3
°
之间,弹性铰链输出的电压信号与角位移之间为线性关系,进行动导数风洞试验之前,需要校准弹性铰链电压信号与角位移之间的线性系数。动导数风洞试验数据处理依据校准的线性系数和采集的电压信号计算动导数模型振动过程中的角位移,例如滚转角位移γ、偏航角位移ψ或俯仰角位移θ。
5.当前校准弹性铰链的普遍做法是利用水平仪或象限仪等角度测量仪器测量弹性铰链振动过程中的角度值,例如θi(i=1,i=2,i=3,
…
),采集系统采集对应状态下弹性铰链输出的电压值ui(i=1,i=2,i=3,
…
),由此计算电压与角位移之间的线性系数。
6.采用水平仪、象限仪等仪器可直接测量滚转和俯仰方向振动过程中的角度,而偏航方向的振动角度无法直接测量,需要将偏航振动试验装置从中部支架拆卸下来,然后旋转90
°
,在俯仰方向上进行测量和校准,试验装置需要拆卸和重新装配,校准过程操作较为麻烦,自动化程度不高,而且,经常拆卸和安装影响动导数试验装置的装配精度,造成不同期试验数据重复性精度不高。
技术实现要素:
7.本实用新型要解决的技术问题是:克服现有技术的不足,提供一种新型的用于动导数弹性铰链的校准装置,实现偏航方向弹性铰链的快速准确校准,避免拆装动导数试验装置,同时也具备滚转和俯仰方向弹性铰链的校准功能。
8.本实用新型的技术解决方案是:
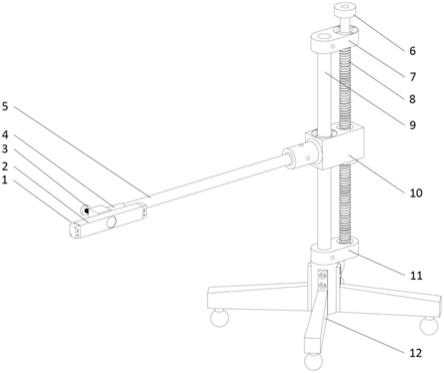
9.一种新型动导数弹性铰链校准装置,该装置主要包括:两台激光位移传感器、传感器安装架、拉紧螺钉、横杆接头、横杆、转盘、上端盖、立杆、丝杠、横杆支座、下端盖、支腿、套筒。
10.传感器安装架外形为长方体,两台激光位移传感器安装于传感器安装架两侧,各自通过两枚螺钉与传感器安装架定位并紧固,两个激光位移传感器发射的两束激光之间的垂直距离为300mm。
11.传感器安装架通过一拉紧螺钉与横杆接头连接,传感器安装架可在横杆接头表面360
°
旋转,传感器安装架侧表面和上表面可作为角度测量基准平面,方便精确调整激光位移传感器的空间角度。
12.横杆接头与横杆一端通过圆孔配合、销钉定位连接。
13.横杆另一端与横杆支座通过圆孔配合、销钉定位连接,横杆支座竖直方向开有一个销钉孔,与竖直方向垂直90
°
方向开有另一个销钉孔,可调整横杆的安装角度,从而调整激光位移传感器的空间角度,方便偏航方法和俯仰方向弹性铰链校准的快速切换。
14.横杆支座中心有两个竖直方向的圆孔,其中一个圆孔内部布置有滚珠轴承,与立杆配合;另一个圆孔内有螺纹,与丝杠配合,横杆支座可顺滑地在丝杆和立杆上下移动。
15.上端盖、下端盖上均设置两个圆孔,上下端盖通过一个圆孔与立杆两端紧配合连接,上下端盖的另一个圆孔内部布置有轴承,与丝杠两端通过轴承配合连接,丝杠通过上下端盖与立杆连接,通过丝杠上部的转盘旋转丝杠,带动横杆支座沿丝杠上下移动,方便激光位移传感器在竖直方向移动。
16.进一步地,立杆与四条支腿通过螺钉连接,立杆和四条支腿构成了校准装置的支撑架,支腿下面安装有滑轮,可在水平面内移动,方便调整激光位移传感器在水平面内的空间位置。
17.进一步地,横杆支座外形为长方体和圆柱的组合体,其中圆柱体沿轴线方向开有圆孔,周向开有销钉孔,与横杆通过销钉定位、圆孔配合连接;横杆支座长方体内部开有竖直方向的圆孔和螺纹孔,圆孔内部安装轴承,与立杆接触配合;螺纹孔与丝杠配合。
18.本实用新型将原有的通过直接测量角度改为通过测量两点位移从而间接计算角度,同时设计了三维可移动、角度可调整、空间定位精确的支撑调整系统,构建了一套新型的动导数弹性铰链校准装置。针对不同的动导数试验装置,设计了偏航/俯仰方向套筒和滚转方向套筒,套筒表面可作为角度测量基准平面,将套筒装配于试验装置测力天平的模型端,并将俯仰和滚转方向调平。通过支撑调整系统可精确方便调整激光位移传感器的空间位置和角度,最终激光位移传感器对准套筒表面中心区域,将位移传感器信号和弹性铰链电压信号接入采集系统,在机构简谐振动过程中,可快速实现位移信号和电压信号同时精确测量,通过简单换算即可获得线性系数,整个校准过程无需拆装动导数试验装置,无需人工读数,自动化程度较高,测量校准速度快,效率高。
附图说明
19.图1本实用新型偏航方向动导数弹性铰链校准装置
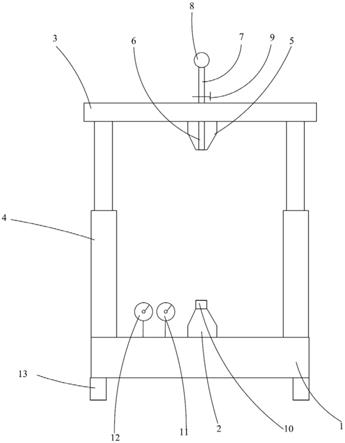
20.图2偏航振动动导数试验装置
21.图3本实用新型俯仰方向动导数弹性铰链校准装置
22.图4俯仰振动动导数试验装置
23.图5本实用新型滚转方向动导数弹性铰链校准装置
24.图6滚转振动动导数试验装置
25.其中,1-激光位移传感器;2-传感器安装架;3-拉紧螺钉;4-横杆接头;5-横杆;6-转盘;7-上端盖;8-丝杠;9-立杆;10-横杆支座;11-下端盖;12-支腿;13-偏航方向套筒;14-支杆;15-中部支架;16-驱动电机;17-俯仰套筒(与偏航方向一致);18-滚转方向套筒。
具体实施方式
26.下面结合附图及优选实施例对本实用新型作进一步的详细叙述。
27.图1所示为本实用新型偏航方向动导数弹性铰链校准装置的装配图。该装新型动导数弹性铰链校准装置主要包括:两台激光位移传感器1、传感器安装架2、拉紧螺钉3、横杆接头4、横杆5、转盘6、上端盖7、立杆9、丝杠8、横杆支座10、下端盖11、支腿12、套筒13。
28.传感器安装架2外形为一长方体,传感器安装架2两侧相对布置两台激光位移传感器1,每台传感器1通过两个螺钉与传感器安装架2定位并拉紧;传感器安装架2通过拉紧螺钉3与横杆接头4连接,传感器安装架2可在横杆接头4表面360
°
旋转,传感器安装架2两侧和上部平面可作为角度测量基准平面,通过水平仪等角度测量仪器可精确调整传感器安装架的安装角度,进而调整位移传感器1的空间角度。
29.横杆5一端与横杆接头4通过销钉定位、圆孔连接,另一端以同样的配合方式与横杆支座10连接,同时横杆5可相对横杆支座10圆孔轴线旋转90
°
,可改变位移传感器1激光的照射方向,方便偏航方法和俯仰方向弹性铰链校准的快速切换。
30.横杆支座10外形为长方体和圆柱的组合体,其中圆柱沿轴线方向开有圆孔,周向开有销钉孔,与横杆5通过销钉定位、圆孔配合连接;横杆支座圆柱体竖直方向开有一个销钉孔,与竖直方向垂直90
°
方向开有另一个销钉孔,可调整横杆的安装角度,从而调整激光位移传感器的空间角度,方便偏航方法和俯仰方向弹性铰链校准的快速切换。
31.横杆支座10长方体内部开有圆孔和螺纹孔,圆孔内部安装轴承,与立杆9接触配合并可沿立杆9上下移动;螺纹孔与丝杠8配合并可沿丝杠8上下移动。
32.上端盖7、下端盖11上均设置两个圆孔,上下端盖通过一个圆孔与立杆9两端紧配合连接,上下端盖的另一个圆孔内部布置有轴承,与丝杠8两端通过轴承配合连接,丝杠8分别通过上端盖7和下端盖11与立杆9连接,手动旋转丝杠8上部的转盘6,可带动横杆支座10上下移动,方便调整位移传感器1在竖直方向的位置。
33.立杆9与四条支腿12通过螺钉连接,立杆9和支腿12构成了校准装置的支撑架,支腿12下面安装有滑轮,可在水平面内移动,方便调整位移传感器1在水平面内的空间位置。
34.图2所示为偏航振动动导数试验装置。正如图2所示,将偏航方向套筒13装配于测力天平模型端,测力天平和弹性铰链位于套筒内,整个试验装置通过中部支架15安装于校准台架上,偏航振动过程中,驱动电机16通过运动转换机构将电机的连续旋转运动转换为偏航方向的简谐振动,偏航套筒13在水平面内绕铰链中心往复振动,支杆14不运动。
35.在进行偏航方向弹性铰链校准前,首先调整套筒13与测力天平的安装角度。套筒13和天平通过圆锥配合连接,套筒13上表面和侧表面可作为角度测量基准平面,通过角度
测量仪器将其俯仰方向和滚转方向调平,俯仰方向角度误差限制于3
′
以内,滚转方向角度误差限制在6
′
以内。移动校准装置,将激光位移传感器1靠近套筒13侧表面,利用水平仪等角度测量仪器调整传感器安装架2的俯仰方向和滚转方向角度,最终使得位移传感器1发出的激光对准套筒13中心待测区域。
36.在进行偏航方向弹性铰链校准时,启动驱动电机16,套筒13由负向角度最大值向正向角度最大值运动过程中,数采系统同时采集位移信号和电压信号。一般采集9组数据,位移信号分别为s
1i
和s
2i
(i=1,i=2,i=3,
…
,i=9,其中s1和s2分别为两台激光位移传感器1测量值),电压信号为ui(i=1,i=2,i=3,
…
,i=9),换算偏航方向角位移ψi=atan(s
1i-s
2i
)/300,利用线性拟合获得偏航方向角位移ψi与电压信号ui之间的系数k,完成偏航方向弹性铰链校准全部流程。
37.图3所示为本实用新型俯仰方向动导数弹性铰链校准装置的装配图,图4所示为俯仰振动动导数试验装置。进行俯仰方向弹性铰链校准时,将横杆5沿轴线旋转90
°
,通过销钉精确定位,激光照射方向由水平调整为竖直方向;同时降低位移传感器1的高度,将位移传感器1移动至俯仰套筒17正下方,并对准其中心部位。
38.图5所示为本实用新型滚转方向动导数弹性铰链校准装置的装配图,图6所示为滚转振动动导数试验装置。进行滚转方向弹性铰链校准时,传感器安装架2绕竖直方向旋转90
°
,将位移传感器1移动至滚转套筒18正下方并对准其中心部位。俯仰方向、滚转方向弹性铰链校准过程和计算方法与偏航方向类似,不做赘述。
39.本实用新型通过合理的结构设计,提供了一套移动方便、角度可调、定位精确、自动化程度高的新型动导数弹性铰链校准装置。相比于原先采用水平仪等角度测量仪器校准弹性铰链的装置及实现方式,本实用新型在弹性铰链校准过程中,无需拆转动导数试验装置,可方便实现偏航方向、俯仰方向和滚转方向弹性铰链校准的快速切换。校准过程实现了位移信号和电压信号同步采集,无需人工读数,测量精度高,自动化程度高,校准效率高。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。