1.本发明属于车辆频繁变道检测领域,特别是一种基于车道级定位的车辆频繁变道检测方法。
背景技术:
2.高速公路具有车速高、封闭性强、车型复杂等特点,致使公路交通事故伤亡与财产损失相比于城市道路更为严重。而在高速公路上,频繁变道这一不良驾驶行为存在严重的安全隐患,因此对频繁变道这一驾驶行为进行检测十分必要。
3.传统的频繁变道检测主要靠对车辆转向进行检测进而检测车辆变道,该方法检测精度受到限制,容易产生误检。随着电子地图的发展和定位技术的提升,根据车道级定位的方法来检测车辆频繁变道具备较高的检测精度,但在隧道等定位精度较差的地方难以进行准确定位。
技术实现要素:
4.本发明的目的在于提供一种基于车道级定位的车辆频繁变道检测方法,是一种融合车辆和最右车道线距离、道路前方视频车头中心点与图像最右车道线的像素距离两种数据的方法,对车辆所在车道进行精确判断,能极大提升频繁变道检测的精度。
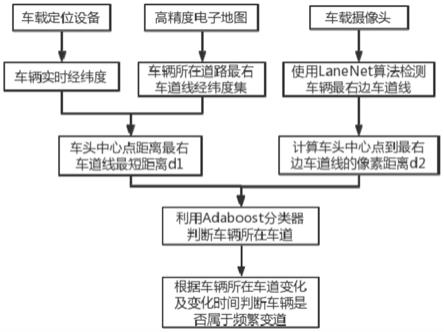
5.实现本发明目的的技术解决方案为:一种基于车道级定位的车辆频繁变道检测方法,所述方法包括以下步骤:
6.步骤s1,在车头中心位置装载定位设备和摄像头;
7.步骤s2,通过所述定位设备实时采集车辆经纬度数据并按时间进行记录;
8.步骤s3,通过所述摄像头检测道路最右车道线;
9.步骤s4,根据步骤s2所得数据计算车头中心点与最右车道线的真实距离d1,根据步骤s3所得数据计算车头中心点与图像最右车道线的像素距离d2;
10.步骤s5,利用adaboost分类器对所在车道和d1、d2进行训练,最后根据实时d1、 d2数据对车辆所在车道进行判断;
11.步骤s6,根据步骤s4车道判别结果,在检测到车辆所在车道发生变化时,自动记录时间t,根据变化情况判断是否属于频繁变道,若在设定时间内车道变更次数超过设定阈值,则属于频繁变道。
12.进一步地,步骤s3采用lanenet算法检测摄像头采集图像中的最右车道线,具体如下:
13.通过摄像头采集若干张白天道路图片和若干张夜晚道路图片,并使用labelme对图像中的最右车道线进行标注,将标注好的图像输入lanenet算法的lannet和h-net两个网络模型进行训练,得到白天和夜晚两个场景的权重;
14.利用训练好的lanenet算法检测最右车道线,具体过程为:
15.a)对输入图像进行语义分割即对像素进行二分类,将像素划分为车道线或者背
景;
16.b)对像素进行嵌入式表示,之后对得到的embedding向量进行训练以用于聚类;
17.c)利用mean-shift算法对上述两个分支的结果进行聚类,得到实例分割的结果,即每条车道线的像素集合;
18.d)利用h-net神经网络预测的变换矩阵对同属一条车道线的所有像素点进行车道拟合,由此检测出最右车道线。
19.进一步地,步骤s4中距离d1的计算方法如下:
20.将车辆当前北斗卫星定位数据经纬度坐标设为(a1,b1),获取车辆所在道路最右车道线的经纬度,遍历最右车道线的经纬度点{(xi,yi)},计算最右车道线上每个经纬度点与经纬度点(a1,b1)之间的距离,将其中的最短距离作为车头中心点与最右车道线的真实距离d1;
21.上述经纬度点之间距离d的计算公式为:
22.d=r*arccos(c)*pi/180
23.其中,
24.c=sin(mb1)*sin(myi)*cos(ma
1-mxi) cos(mb1)*cos(myi)
25.式中,r为地球半径,pi为圆周率,(ma1,mb1)和(mxi,myi)分别为待计算的两个经纬度点经自定义原则处理后的坐标,所述自定义原则为按照0度经线的基准,东经取经度的正值,西经取经度负值,北纬取90度减去纬度值,南纬取90度加上纬度值。
26.进一步地,步骤s4中距离d2的计算方法如下:
27.根据最右车道线两端的两个像素点坐标q1(z1,z2)、q2(z3,z4)确定最右车道线的函数表达式y=kx b中的k和b;
28.摄像头采集的图像数据尺寸为pt1*pt2,设置车头中心点为p(pt2/2,0),计算p 点到最右车道线的距离作为车头中心点与图像最右车道线的像素距离d2:
[0029][0030]
进一步地,步骤s5所述利用adaboost分类器对所在车道和d1、d2进行训练,最后根据实时d1、d2数据对车辆所在车道进行判断,具体过程包括:
[0031]
a)执行步骤s2至s4若干次,获得车道和d1、d2形成的训练样本集s,划分为正样本和负样本;t为训练的最大循环次数;
[0032]
b)初始化样本权重为1/n,即为训练样本的初始概率分布;
[0033]
c)第一次迭代:
[0034]
(1)训练弱分类器;
[0035]
(2)计算弱分类器的错误率;
[0036]
(3)设定阈值,使得误差最小;
[0037]
(4)更新样本权重;
[0038]
经t次循环后,得到t个弱分类器,按更新的权重叠加,最终得到强分类器;
[0039]
将实时的d1、d2输入强分类器,即可得到所在车道的结果。
[0040]
一种基于车道级定位的车辆频繁变道检测系统,所述系统包括依次执行的:
[0041]
数据采集模块,用于通过定位设备实时采集车辆经纬度数据并按时间进行记录;
[0042]
车道线检测模块,用于通过摄像头检测道路最右车道线;
[0043]
距离计算模块,用于根据数据采集模块所得数据计算车头中心点与最右车道线的真实距离d1,根据车道线检测模块所得数据计算车头中心点与图像最右车道线的像素距离 d2;
[0044]
训练和判断模块,用于利用adaboost分类器对所在车道和d1、d2进行训练,最后根据实时d1、d2数据对车辆所在车道进行判断;
[0045]
频繁变道判定模块,用于根据训练和判断模块车道判别结果,在检测到车辆所在车道发生变化时,自动记录时间t,根据变化情况判断是否属于频繁变道,若在设定时间内车道变更次数超过设定阈值,则属于频繁变道。
[0046]
一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现以下步骤:
[0047]
步骤s1,在车头中心位置装载定位设备和摄像头;
[0048]
步骤s2,通过所述定位设备实时采集车辆经纬度数据并按时间进行记录;
[0049]
步骤s3,通过所述摄像头检测道路最右车道线;
[0050]
步骤s4,根据步骤s2所得数据计算车头中心点与最右车道线的真实距离d1,根据步骤s3所得数据计算车头中心点与图像最右车道线的像素距离d2;
[0051]
步骤s5,利用adaboost分类器对所在车道和d1、d2进行训练,最后根据实时d1、 d2数据对车辆所在车道进行判断;
[0052]
步骤s6,根据步骤s4车道判别结果,在检测到车辆所在车道发生变化时,自动记录时间t,根据变化情况判断是否属于频繁变道,若在设定时间内车道变更次数超过设定阈值,则属于频繁变道。
[0053]
一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:
[0054]
步骤s1,在车头中心位置装载定位设备和摄像头;
[0055]
步骤s2,通过所述定位设备实时采集车辆经纬度数据并按时间进行记录;
[0056]
步骤s3,通过所述摄像头检测道路最右车道线;
[0057]
步骤s4,根据步骤s2所得数据计算车头中心点与最右车道线的真实距离d1,根据步骤s3所得数据计算车头中心点与图像最右车道线的像素距离d2;
[0058]
步骤s5,利用adaboost分类器对所在车道和d1、d2进行训练,最后根据实时d1、 d2数据对车辆所在车道进行判断;
[0059]
步骤s6,根据步骤s4车道判别结果,在检测到车辆所在车道发生变化时,自动记录时间t,根据变化情况判断是否属于频繁变道,若在设定时间内车道变更次数超过设定阈值,则属于频繁变道。
[0060]
本发明与现有技术相比,其显著优点为:
[0061]
(1)lanenet网络检测速度快且在车道线检测方面精度较优。
[0062]
(2)采用adaboost分类器,随着数据量的增加分类效果也有所提升,检测精度好且简便。
[0063]
(3)本发明相较于传统的频繁变道检测技术,从车道定位技术出发,具备较好的应用前景,且避免复杂环境下定位设备失效或视频无法检测最右车道线的情况下无法判断车
道的情况,在任意环境下均具备较高的车道检测效果,从而精准判断车辆是否进行频繁变道的行为。
[0064]
(4)本发明不仅可以检测车辆频繁变道这一危险驾驶行为,还可以检测车辆违规变道等,应用广泛。
[0065]
下面结合附图对本发明作进一步详细描述。
附图说明
[0066]
图1为本发明基于车道级定位的车辆频繁变道检测方法的流程图。
[0067]
图2为d1计算方法示意图。
[0068]
图3为d2计算方法示意图。
[0069]
图4为分类算法整体框架图。
具体实施方式
[0070]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
[0071]
在一个实施例中,结合图1,提供了一种基于车道级定位的车辆频繁变道检测方法,所述方法包括以下步骤:
[0072]
步骤s1,在车头中心位置装载定位设备和摄像头;
[0073]
步骤s2,通过所述定位设备实时采集车辆经纬度数据并按时间进行记录;
[0074]
步骤s3,通过所述摄像头检测道路最右车道线;
[0075]
步骤s4,根据步骤s2所得数据计算车头中心点与最右车道线的真实距离d1,根据步骤s3所得数据计算车头中心点与图像最右车道线的像素距离d2;
[0076]
步骤s5,利用adaboost分类器对所在车道和d1、d2进行训练,最后根据实时d1、 d2数据对车辆所在车道进行判断;
[0077]
步骤s6,根据步骤s4车道判别结果,在检测到车辆所在车道发生变化时,自动记录时间t,根据变化情况判断是否属于频繁变道,若在设定时间内车道变更次数超过设定阈值,则属于频繁变道。
[0078]
进一步地,在其中一个实施例中,步骤s1中定位设备包括北斗接收模块,通过其接收的数据进行经纬度提取,并标定时间,存储为{a1,b1,ti},a1、b1、ti分别表示经度、纬度和时间。
[0079]
进一步地,在其中一个实施例中,步骤s1中所述摄像头具备夜视功能。
[0080]
进一步地,在其中一个实施例中,步骤s3采用lanenet算法检测摄像头采集图像中的最右车道线,具体如下:
[0081]
通过摄像头采集若干张白天道路图片和若干张夜晚道路图片,并使用labelme对图像中的最右车道线进行标注,将标注好的图像输入lanenet算法的lannet和h-net两个网络模型进行训练,得到白天和夜晚两个场景的权重;
[0082]
利用训练好的lanenet算法检测最右车道线,具体过程为:
[0083]
a)对输入图像进行语义分割即对像素进行二分类,将像素划分为车道线或者背
景;
[0084]
b)对像素进行嵌入式表示,之后对得到的embedding向量进行训练以用于聚类;
[0085]
c)利用mean-shift算法对上述两个分支的结果进行聚类,得到实例分割的结果,即每条车道线的像素集合;
[0086]
d)利用h-net神经网络预测的变换矩阵对同属一条车道线的所有像素点进行车道拟合,由此检测出最右车道线。
[0087]
进一步地,在其中一个实施例中,结合图2,步骤s4中距离d1的计算方法如下:
[0088]
将车辆当前北斗卫星定位数据经纬度坐标设为(a1,b1),获取车辆所在道路最右车道线的经纬度,遍历最右车道线的经纬度点{(xi,yi)},计算最右车道线上每个经纬度点与经纬度点(a1,b1)之间的距离,将其中的最短距离作为车头中心点与最右车道线的真实距离d1;
[0089]
上述经纬度点之间距离d的计算公式为:
[0090]
d=r*arccos(c)*pi/180
[0091]
其中,
[0092]
c=sin(mb1)*sin(myi)*cos(ma
1-mxi) cos(mb1)*cos(myi)
[0093]
式中,r为地球半径,pi为圆周率,(ma1,mb1)和(mxi,myi)分别为待计算的两个经纬度点经自定义原则处理后的坐标,所述自定义原则为按照0度经线的基准,东经取经度的正值,西经取经度负值,北纬取90度减去纬度值,南纬取90度加上纬度值。
[0094]
进一步地,在其中一个实施例中,结合图3,步骤s4中距离d2的计算方法如下:
[0095]
根据最右车道线两端的两个像素点坐标q1(z1,z2)、q2(z3,z4)确定最右车道线的函数表达式y=kx b中的k和b;
[0096]
摄像头采集的图像数据尺寸为pt1*pt2,设置车头中心点为p(pt2/2,0),计算p 点到最右车道线的距离作为车头中心点与图像最右车道线的像素距离d2:
[0097][0098]
进一步地,在其中一个实施例中,结合图4,步骤s5所述利用adaboost分类器对所在车道和d1、d2进行训练,最后根据实时d1、d2数据对车辆所在车道进行判断,具体过程包括:
[0099]
a)执行步骤s2至s4若干次,获得车道和d1、d2形成的训练样本集s,划分为正样本和负样本;t为训练的最大循环次数;
[0100]
b)初始化样本权重为1/n,即为训练样本的初始概率分布;
[0101]
c)第一次迭代:
[0102]
(1)训练弱分类器;
[0103]
(2)计算弱分类器的错误率;
[0104]
(3)设定阈值,使得误差最小;
[0105]
(4)更新样本权重;
[0106]
经t次循环后,得到t个弱分类器,按更新的权重叠加,最终得到强分类器;
[0107]
将实时的d1、d2输入强分类器,即可得到所在车道的结果。
[0108]
在一个实施例中,提供了一种基于车道级定位的车辆频繁变道检测系统,所述系
统包括依次执行的:
[0109]
数据采集模块,用于通过定位设备实时采集车辆经纬度数据并按时间进行记录;
[0110]
车道线检测模块,用于通过摄像头检测道路最右车道线;
[0111]
距离计算模块,用于根据数据采集模块所得数据计算车头中心点与最右车道线的真实距离d1,根据车道线检测模块所得数据计算车头中心点与图像最右车道线的像素距离 d2;
[0112]
训练和判断模块,用于利用adaboost分类器对所在车道和d1、d2进行训练,最后根据实时d1、d2数据对车辆所在车道进行判断;
[0113]
频繁变道判定模块,用于根据训练和判断模块车道判别结果,在检测到车辆所在车道发生变化时,自动记录时间t,根据变化情况判断是否属于频繁变道,若在设定时间内车道变更次数超过设定阈值,则属于频繁变道。
[0114]
关于基于车道级定位的车辆频繁变道检测系统的具体限定可以参见上文中对于基于车道级定位的车辆频繁变道检测方法的限定,在此不再赘述。上述基于车道级定位的车辆频繁变道检测系统中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
[0115]
在一个实施例中,提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现以下步骤:
[0116]
步骤s1,在车头中心位置装载定位设备和摄像头;
[0117]
步骤s2,通过所述定位设备实时采集车辆经纬度数据并按时间进行记录;
[0118]
步骤s3,通过所述摄像头检测道路最右车道线;
[0119]
步骤s4,根据步骤s2所得数据计算车头中心点与最右车道线的真实距离d1,根据步骤s3所得数据计算车头中心点与图像最右车道线的像素距离d2;
[0120]
步骤s5,利用adaboost分类器对所在车道和d1、d2进行训练,最后根据实时d1、 d2数据对车辆所在车道进行判断;
[0121]
步骤s6,根据步骤s4车道判别结果,在检测到车辆所在车道发生变化时,自动记录时间t,根据变化情况判断是否属于频繁变道,若在设定时间内车道变更次数超过设定阈值,则属于频繁变道。
[0122]
关于每一步的具体限定可以参见上文中对于基于车道级定位的车辆频繁变道检测方法的限定,在此不再赘述。
[0123]
在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:
[0124]
步骤s1,在车头中心位置装载定位设备和摄像头;
[0125]
步骤s2,通过所述定位设备实时采集车辆经纬度数据并按时间进行记录;
[0126]
步骤s3,通过所述摄像头检测道路最右车道线;
[0127]
步骤s4,根据步骤s2所得数据计算车头中心点与最右车道线的真实距离d1,根据步骤s3所得数据计算车头中心点与图像最右车道线的像素距离d2;
[0128]
步骤s5,利用adaboost分类器对所在车道和d1、d2进行训练,最后根据实时d1、 d2数据对车辆所在车道进行判断;
[0129]
步骤s6,根据步骤s4车道判别结果,在检测到车辆所在车道发生变化时,自动记录时间t,根据变化情况判断是否属于频繁变道,若在设定时间内车道变更次数超过设定阈值,则属于频繁变道。
[0130]
关于每一步的具体限定可以参见上文中对于基于车道级定位的车辆频繁变道检测方法的限定,在此不再赘述。
[0131]
以上实施例仅用以说明本发明的技术方案而非对其限制;尽管参照较佳实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者对部分技术特征进行等同替换,比如车道线检测技术以及数据融合技术;以上不应脱离本发明技术方案的精神,其均应涵盖在本发明请求保护的技术方案范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。