技术特征:
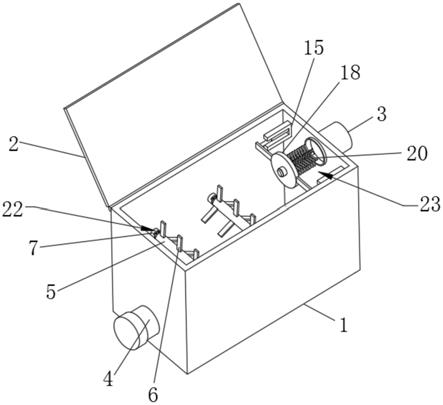
1.用于清理储罐油泥的机器人,其特征在于,包括:底盘组件(5);两组行走组件(4),用于与储罐接触并与其发生相对运动,两组所述行走组件(4)对称安装于所述底盘组件(5)横向的两侧;抽吸组件(3),用于抽吸储罐内的油泥,所述抽吸组件(3)位于所述底盘组件(5)下方,并与所述底盘组件(5)连接;机械臂组件(2),所述机械臂组件(2)连接于所述底盘组件(5)与所述抽吸组件(3)连接的一端;挖斗(1),用于刮除储罐罐底的油泥,所述挖斗(1)转动连接于所述机械臂组件(2)远离所述底盘组件(5)的一端;控制系统,用于控制所述行走组件(4)和所述机械臂组件(2)工作,所述控制系统安装于所述底盘组件(5)。2.根据权利要求1所述的用于清理储罐油泥的机器人,其特征在于,所述底盘组件(5)包括:底盘下板(52),所述底盘下板(52)与所述抽吸组件(3)转动连接;两个底盘横梁(53),与两个所述行走组件(4)一一对应对接,两个所述底盘横梁(53)分别通过第一连接梁(54)连接于所述底盘下板(52)的横向两侧;底盘上板(55),所述底盘上板(55)转动连接于所述底盘下板(52),所述底盘上板(55)与所述机械臂组件(2)转动连接。3.根据权利要求2所述的用于清理储罐油泥的机器人,其特征在于,所述底盘组件(5)还包括外壳(51),所述外壳(51)固定连接于所述底盘上板(55),所述外壳(51)与所述底盘上板(55)形成用于放置所述控制系统的空腔。4.根据权利要求3所述的用于清理储罐油泥的机器人,其特征在于,所述外壳(51)上设有摄像头(6),所述摄像头(6)与所述控制系统连接。5.据权利要求2所述的用于清理储罐油泥的机器人,其特征在于,所述行走组件(4)包括:履带;驱动轮(42),用于驱动所述履带转动,所述驱动轮(42)与所述履带连接;驱动电机(41),用于驱动所述驱动轮(42)转动,所述驱动电机(41)的输出轴固定连接于所述驱动轮(42)轮轴,所述驱动电机(41)固定连接于所述底盘横梁(53);支撑轮(43),用于支撑所述履带,所述支撑轮(43)转动连接于所述底盘横梁(53);张紧轮机构(44),用于调节所述履带的松紧度,所述张紧轮机构(44)连接于所述底盘横梁(53)。6.根据权利要求5所述的用于清理储罐油泥的机器人,其特征在于,所述张紧轮机构(44)包括:第一固定支架(443),所述第一固定支架(443)固定连接于所述底盘横梁(53);张紧轮支架(442),所述张紧轮支架(442)滑动连接于所述第一固定支架(443);张紧轮(441),所述张紧轮(441)安装于所述张紧轮支架(442),所述张紧轮(441)与所述履带连接;
气缸(444),所述气缸(444)与所述张紧轮支架(442)远离所述张紧轮(441)的一端连接;第二固定支架(445),用于安装所述气缸(444),所述第二固定支架(445)固定连接于所述气缸(444)远离所述张紧轮支架(442)的一端,所述第二固定支架(445)固定连接于所述底盘横梁(53);其中,所述气缸(444)通过驱动所述张紧轮支架(442)沿所述第一固定支架(443)滑动,以调节所述张紧轮(441)与所述履带的张紧效果。7.根据权利要求2所述的用于清理储罐油泥的机器人,其特征在于,所述抽吸组件(3)包括推铲(31),所述推铲(31)通过第一液压杆(8)与所述底盘下板(52)连接,所述推铲(31)通过第二连接梁(32)与所述第一连接梁(54)转动连接;所述推铲(31)连接有收集板(33),所述收集板(33)远离所述推铲(31)的一端连接有排污管(34);所述推铲(31)设有若干油泥进入通孔,若干所述油泥进入通孔与所述收集板(33)相连通。8.根据权利要求2所述的用于清理储罐油泥的机器人,其特征在于,所述机械臂组件(2)包括:连接板(26),所述连接板(26)固定连接于所述底盘上板(55);第一机械臂(24),所述第一机械臂(24)转动连接于所述连接板(26);第二机械臂(21),所述第二机械臂(21)转动连接于所述第一机械臂(24)远离所述连接板(26)的一端;第二液压杆(22),用于调节所述挖斗(1)相对所述第一机械臂(24)的转动角度,所述第二液压杆(22)连接于所述第一机械臂(24)与所述挖斗(1)之间;第三液压杆(23),用于调节所述第一机械臂(24)相对所述第二机械臂(21)的转动角度,所述第三液压杆(23)连接于所述第一机械臂(24)与所述第二机械臂(21)之间;第四液压杆(25),用于调节所述第二机械臂(21)相对所述连接板(26)的转动角度,所述第四液压杆(25)连接于所述第二机械臂(21)与所述连接板(26)之间。9.根据权利要求8所述的用于清理储罐油泥的机器人,其特征在于,所述第二机械臂(21)安装有水枪(7),所述水枪(7)与储罐外部的水泵连接。
技术总结
本实用新型涉及一种用于清理储罐油泥的机器人,属于机器人领域,该机器人包括底盘组件、两组行走组件、抽吸组件、机械臂组件和控制系统;两组行走组件用于与储罐接触并与其发生相对运动,两组行走组件对称安装于底盘组件横向的两侧;抽吸组件用于抽吸储罐内的油泥,抽吸组件位于底盘组件下方,并与底盘组件连接;机械臂组件连接于底盘组件与抽吸组件连接的一端;挖斗用于刮除储罐罐底的油泥,挖斗转动连接于机械臂组件远离底盘组件的一端;控制系统用于控制行走组件和机械臂组件工作,控制系统安装于底盘组件。该机器人具有良好的运动性能,能够有效刮除储罐罐底的油泥,并将油泥抽吸到储罐外部,油泥清理效果好,清理效率高。清理效率高。清理效率高。
技术研发人员:李广庭 王佃英 张海波 柳震 高宏
受保护的技术使用者:东营鑫博瑞智能科技有限公司
技术研发日:2022.01.24
技术公布日:2022/5/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。