1.本发明涉及信息技术与建筑安全管理领域,具体是一种基于滑动窗口原理的房屋质量检测方法。
背景技术:
2.商业地产是房地产业与商业综合融合,促进建筑业多元化发展的一种重要方式。商业地产按其相应的功能可分为多种形式,包括写字楼、商铺、工业地产、住宅地产等。商业地产在施工过程中不仅需要按照设计规范进行严格的质量控制,还需要按照相关规范进行监管验收。同时,在商业建筑中,建筑效果的美学越来越受到人们的重视。
3.混凝土表面的平整度和垂直度不仅是监管验收的重要标志,也是影响施工效果美观的重要因素。当前,平面度和垂直度的质量评定,通常采用两米直尺和塞尺进行手动测量。一方面,在垂直度验收测试期间,检查员应确保标尺垂直于地面,因此可能需要激光水准仪作为参考,每隔一段时间对被测墙体进行抽样检查。另一方面,对于平整度验收测试,检查员可通过缝隙测量多个取样测量点与两米直尺之间的高程,或使用测斜仪测量一对取样测量点之间的高程差。实际工程中室内验收试验采用统一的测点,以确保验收成功。但即使有固定的测点,室内验收测试仍然很费时和昂贵。尤其是在房间较多的住宅中,通常需要2-3名有经验的工人花费大量时间测量所有房间。此外,定点测量结果不能反映被检混凝土表面的整体信息,可能导致验收结果不正确。因此,需要一个方便的验收系统来自动提供准确的混凝土表面平整度和垂直度信息。
技术实现要素:
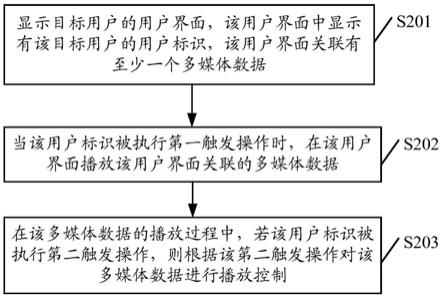
4.本发明的目的是提供一种基于滑动窗口原理的房屋质量检测方法,步骤包括:
5.1)获取房屋扫描点云数据,并对房屋扫描点云数据进行分割,得到若干点云分块。
6.所述点云分块包括墙、地面、天花板的点云分块。
7.2)检测每个点云分块的边界和角点,并提取角点与边界的距离大于r的点云块;r》0;
8.3)对步骤2)提取出的点云分块进行平面拟合,得到点云块拟合平面。以点云块拟合平面为相应点云分块的参考平面,计算点云分块中每一个点相对于参考平面的偏差值。
9.计算点云分块中每一个点相对于参考平面的偏差值的步骤包括:
10.3.1)以参考平面的法向量为正向,计算点云分块中各点相对于参考平面的偏差值。
11.3.2)将点云分块中与边界距离小于h1的点的偏差值设置为0。
12.4)根据点云分块边界的垂直边界向量对点云分块进行网格划分,得到点云分块集合,并将点云分块集合映射为二维图像矩阵。
13.根据点云分块边界的垂直边界向量对点云分块进行网格划分的步骤包括:
14.4.1)以点云分块边界的垂直边界向量起点为原点,垂直边界向量方向为坐标轴,
建立坐标系。
15.4.2)根据坐标系对点云分块进行网格划分,得到网格分块集合s={s
i,j
|i∈[1,n],j∈[1,m]}。其中n,m分别网格横向排列和纵向排列的数目。s
i,j
为对应网格内点相对参考平面的偏差值。
[0016]
二维图像矩阵记为a∈rn×m,矩阵a的元素值a
i,j
如下所示:
[0017]ai,j
=i(s
i,j
)
·
max(abs(s
i,j
))
ꢀꢀ
(1)
[0018]
其中,参数i(s
i,j
)如下所示:
[0019][0020]
5)利用滑动窗口对所述二维图像矩阵进行评估,得到房屋的最大偏差矩阵。
[0021]
利用滑动窗口对所述二维图像矩阵进行评估的步骤包括:
[0022]
5.1)以d为网格边长、生成若干种横纵比不同、对角线长相同的点云块矩形,并将这些点云块矩形映射为值全为1的二维图像的滑动窗口,记为w1、w2、...、wk。其中,滑动窗口wk的边长分别记为nk、mk。k=1,2,
…
,k。
[0023]
5.2)对二维图像矩阵a的长、宽进行零行填充,得到矩阵填充长度分别为(n
k-1)/2、(m
k-1)/2。
[0024]
5.3)利用滑动窗口对所述二维图像矩阵进行评估,得到房屋的最大偏差矩阵d∈rn
×
m。
[0025]
其中,最大偏差矩阵d的元素d
n,m
如下所示:
[0026][0027]
式中,参数n∈[1,n],参数m∈[1,m]。
[0028]
其中,元素d
n,m
对应的滑动窗口wk的滑动子区域region(n,m,k)如下所示:
[0029][0030]
式中,矩阵下标集合i={1,2,
…
,nk},j={1,2,
…
,mk}。
[0031]
本发明的技术效果是毋庸置疑的,本发明提出一种基于滑动窗口的房屋质量检测方法,该方法通过利用三维激光扫描技术与滑动窗口原理,能有效解决房屋质量检测中费时费力,难以反应混凝土表面整体信息的问题,可以有效反应混凝土表面的整体信息,提高检测效率,提升房屋表面质量和建筑美观程度。
附图说明
[0032]
图1为基于滑动窗口原理的房屋质量检测方法的流程图;
[0033]
图2为一个待进行质量检测房间的点云扫描;
[0034]
图3为一个房屋点云数据的天花板平面映射实例;
[0035]
图4为一个天花板边界检测的实例;
[0036]
图5为天花板点云点与拟合平面相对距离色差图;
[0037]
图6为天花板点云与拟合平面相对距离映射的二维图像;
[0038]
图7为滑动窗口示意图;
[0039]
图8为滑动窗口工作原理示意;
[0040]
图9为天花板点云的区域相对偏差映射的二维图像;
具体实施方式
[0041]
下面结合实施例对本发明作进一步说明,但不应该理解为本发明上述主题范围仅限于下述实施例。在不脱离本发明上述技术思想的情况下,根据本领域普通技术知识和惯用手段,做出各种替换和变更,均应包括在本发明的保护范围内。
[0042]
实施例1:
[0043]
参见图1至图9,一种基于滑动窗口原理的房屋质量检测方法,步骤包括:
[0044]
1)获取房屋扫描点云数据,并对房屋扫描点云数据进行分割,得到若干点云分块。
[0045]
所述点云分块包括墙、地面、天花板的点云分块。
[0046]
2)检测每个点云分块的边界和角点,并提取边界和角点的距离超过0.1m的点云块。
[0047]
3)对步骤2)提取出的点云分块进行平面拟合,得到点云块拟合平面。以点云块拟合平面为相应点云分块的参考平面,计算点云分块中每一个点相对于参考平面的偏差值。
[0048]
计算点云分块中每一个点相对于参考平面的偏差值的步骤包括:
[0049]
3.1)以参考平面的法向量为正向,计算点云分块中各点相对于参考平面的偏差值。
[0050]
3.2)将点云分块中与边界距离小于h1的点的偏差值设置为0。
[0051]
4)根据点云分块边界的垂直边界向量对点云分块进行网格划分,得到点云分块集合,并将点云分块集合映射为二维图像矩阵。
[0052]
根据点云分块边界的垂直边界向量对点云分块进行网格划分的步骤包括:
[0053]
4.1)以点云分块边界的垂直边界向量起点为原点,垂直边界向量方向为坐标轴,建立坐标系。
[0054]
4.2)根据坐标系对点云分块进行网格划分,得到网格分块集合s={s
i,j
|i∈[1,n],j∈[1,m]}。其中n,m分别网格横向排列和纵向排列的数目。s
i,j
为对应网格内点相对参考平面的偏差值。
[0055]
二维图像矩阵记为a∈rn×m,矩阵a的元素值a
i,j
如下所示:
[0056]ai,j
=i(s
i,j
)
·
max(abs(s
i,j
))
ꢀꢀ
(1)
[0057]
其中,参数i(s
i,j
)如下所示:
[0058][0059]
5)利用滑动窗口对所述二维图像矩阵进行评估,得到房屋的最大偏差矩阵。
[0060]
利用滑动窗口对所述二维图像矩阵进行评估的步骤包括:
[0061]
5.1)以d为网格边长、生成若干种横纵比不同、对角线长相同的点云块矩形,并将这些点云块矩形映射为值全为1的二维图像的滑动窗口,记为w1、w2、...、wk。其中,滑动窗口
wk的长、宽分别记为nk、mk。k=1,2,
…
,k。
[0062]
5.2)对二维图像矩阵a的长、宽进行零行填充,得到矩阵填充长度分别为(n
k-1)/2、(m
k-1)/2。
[0063]
5.3)利用滑动窗口对所述二维图像矩阵进行评估,得到房屋的最大偏差矩阵d∈rn×m。
[0064]
其中,最大偏差矩阵d的元素d
n,m
如下所示:
[0065][0066]
式中,参数n∈[1,n],参数m∈[1,m]。
[0067]
其中,元素d
n,m
对应的滑动窗口wk的滑动子区域region(n,m,k)如下所示:
[0068][0069]
式中,矩阵下标集合i={1,2,
…
,nk},j={1,2,
…
,mk}。
[0070]
实施例2
[0071]
一种基于滑动窗口原理的房屋质量检测方法,步骤包括:
[0072]
s101、对如图2所示的房屋扫描点云进行分割,得到墙、地面、天花板的点云分块;
[0073]
s102、天花板点云块的平面映射如图3所示,利用平面边界、角点检测算法,可得到点云的边界和角点,并提取得到距离每个点云分块边缘超过0.1m的点云块,如图4所示;
[0074]
s103、利用平面拟合算法对s102中得到点云块拟合平面,作为相应点云分块的参考平面,将距离0.0sm内的偏差值设置为0,并以参考平面的法向量为正向,并计算点云分块中每一个点的相对于参考平面偏差值,如图5所示;
[0075]
s104、选取步骤s102中所得的垂直边界向量方向作为坐标轴,对点云进行划分得到点云分块集合,并将集合映射为二维图像。其中所述映射为二维图像描述为:以垂直边界向量起点为原点,垂直边界向量方向为坐标轴,建立坐标系,对点云分块进行网格划分。记划分得到的网格分块集合为s={s
i,j
|i∈[1,n],j∈[1,m]},其中n,m分别网格横向排列和纵向排列的数目;s
i,j
为对应网格内点相对参考平面的偏差值集合。
[0076]
建立二维图像矩阵a∈rn×m,其矩阵元素值为:
[0077][0078]ai,j
=i(s
i,j
)
·
max(abs(s
i,j
))
[0079]
此次n,m分别由坐标轴上最大点云位置坐标决定。
[0080]
所得二维图像如图6所示。
[0081]
s105、如图7所示,以0.02m为网格边长,生成三种对角线长为2m,横纵比分别为1.8、1、0.56的点云块矩形,并分别将其映射为值全为1的二维图像的滑动窗口,分别记为w1,w2,w3。滑动窗口wk,k∈[1,3]的边长分别可用为nk,mk进行表示。
[0082]
如图8所示,对s103中得到二维图像矩阵a∈rn×m,在用窗口wk,k∈[1,3]进行计算时,首先对其长、宽两侧分别进行(n
k-1)/2、(m
k-1)/2零行填充,并记填充之后的矩阵为
记矩阵下标集合i={1,2,
…
,nk},j={1,2,
…
,mk},区域的最大偏差矩阵为d∈rn×m,则d
n,m
对应的wk滑动子区域region(n,m,k)可表示为:
[0083][0084]
其中n∈[1,n],m∈[1,m],则d
n,m
可通过如下等式得到:
[0085][0086]
这里n1、m1分别为51、89,n2、m2分别为71、71,这里n1、m1分别为89、51。
[0087]
所得到区域最大偏差值如图9所示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。