1.本发明涉及动态环境下的精密仪器与微小形变测量技术领域,尤其涉及一种动态环境三维形变检测数字散斑干涉系统及检测方法。
背景技术:
2.随着现代工程材料和医疗技术的发展,新型仿生关节和假肢已被广泛用于肢体残疾者的康复治疗。然而,在仿生关节和假肢的安装过程中,仍有许多困难需要克服。最重要的挑战之一是如何在动态环境下,获取较硬的植入物和较软的骨表面三维匹配信息。匹配信息对于防止松动、错位、界面间隙中的潜在感染或骨坏死至关重要,并且,这些信息通常通过三维应变和微变形出现。这使得骨界面处的三维微应变和变形检测必不可少。尽管当前的cad(计算机辅助设计)软件和有限元分析在应变和变形检测中发挥着重要作用,但精确模型的建立往往需要精确的边界条件和参数,但实际上对于动态环境下的生物材料而言,很难获得准确的边界条件和材料结构参数。因此,有必要寻找一种可满足动态环境的三维形变测量方法。遗憾的是,目前,3d(三维)形变检测方法,仍无法满足动态环境下的检测需求。
3.目前,现有的三维形变测量方法,多为基于时间相移技术的多通道或者多传感器其测量技术,其存在的问题包括:1)多传感器(至少3个)测量技术光路复杂、成本较高,后期数据处理复杂,需要精确的数据对准;2)多光源(至少3个)测量技术的系统空间光学结构复杂、成本高;3)现有dspi时间相移技术的动态测量能力差,测量效果不佳。
技术实现要素:
4.针对上述现有技术中的不足,本发明提供一种动态环境三维形变检测数字散斑干涉系统及检测方法,能够实现动态环境下的三维形变的便捷、快速、准确测量。
5.为了实现上述目的,本发明提供一种动态环境三维形变检测数字散斑干涉系统,包括一双激光光源、一双通道数字剪切散斑干涉系统、一单通道数字散斑干涉系统、一数据采集系统、一机械加载装置和一计算机;所述双激光光源包括一第一激光器、一第二激光器、一第一扩束镜、一第二扩束镜、一第三扩束镜、一第一中性滤光片和一第二中性滤光片,所述第一激光器和所述第二激光器的波长不同;所述双通道数字剪切散斑干涉系统包括一迈克尔逊散斑干涉装置,所述迈克尔逊散斑干涉装置包括一反光镜、一半反半透镜、一成像透镜、一孔径光阑和一可调节反光镜;所述单通道数字散斑干涉系统与所述双通道数字剪切散斑干涉系统共用所述迈克尔逊散斑干涉装置,所述单通道数字散斑干涉系统包括所述迈克尔逊散斑干涉装置和一光纤;所述数据采集系统包括一图像传感器,所述图像传感器连接所述计算机;所述第二激光器、所述第二扩束镜、所述反光镜、所述半反半透镜、所述成像透镜和所述孔径光阑依次设置于一第一光路,所述可调节反光镜和所述图像传感器分别设置于所述半反半透镜的两侧;所述第一激光器、所述第二中性滤光片和所述第一扩束镜依次设置于一第二光路;所述第一中性滤光片和所述第二扩束镜依次设置于一第三光路,
所述光纤设置于所述第一中性滤光片和所述半反半透镜之间;所述机械加载装置设置于所述第一光路、所述第二光路和所述第三光路的汇聚处。
6.优选地,所述计算机根据频谱差异特性,分别计算所述图像传感器采集到的两个剪切散斑图和一个散斑干涉图的相位分布,最后根据所述相位分布的数据,采用基准共用和积分运算,完成三维形变信息的重构和解析运算。
7.优选地,波长不同的所述第一激光器和所述第二激光器通过所述第一光路、所述第二光路和所述第三光路分别从三个不同方向照亮固定于所述机械加载装置上的一待测样本的表面。
8.优选地,所述相位分布的数据包括两个应变相位分布数据和一个形变相位分布数据,且所述相位分布的数据通过空间频谱分离技术和空间载波相位提取技术获得。
9.优选地,三个所述相位分布的数据来自互不共面的三个灵敏度方向,并且三个所述灵敏度方向根据灵敏度检测需求进行调控。
10.优选地,通过分别计算一个散斑干涉方向和两个剪切方向的所述相位分布,并采用基准共用和积分运算,完成所述三维形变信息的重构和解析运算。
11.本发明的一种基于本发明所述的动态环境三维形变检测数字散斑干涉系统的三维形变检测方法,包括步骤:
12.s1:将一待测样本安装在所述机械加载装置上,设置光学系统参数,并将所述第一激光器和所述第二激光器分别以非共面空间结构式分别照亮所述待测样本;
13.s2:打开所述第一激光器和所述第二激光器,所述图像传感器获取形变前散斑干涉数据i1;
14.s3:所述机械加载装置对所述待测样本进行位移加载;
15.s4:所述图像传感器获取形变后散斑干涉数据i2;
16.s5:对所述形变前散斑干涉数据i1和所述形变后散斑干涉数据i2进行数据处理和相位提取,获得对应的第一频域数据fft(i1)和第二频域数据fft(i2);
17.s6:对所述第一频域数据fft(i1)和所述第二频域数据fft(i2)进行傅里叶开窗和复数运算,获得三个灵敏度方向上的第一相位分布数据φ1、第二相位分布数据φ2和第三相位分布数据φ3;
18.s7:根据所述第一相位分布数据φ1、所述第二相位分布数据φ2和所述第三相位分布数据φ3,以及基准共用和积分运算,分别计算三个所述灵敏度方向上的第一形变分布数据u、第二形变分布数据v和第三形变分布数据w;
19.s8:根据所述第一形变分布数据u、所述第二形变分布数据v和所述第三形变分布数据w;以及所述灵敏度方向,完成世界坐标系下三维形变数据重构。
20.本发明由于采用了以上技术方案,使其具有以下有益效果:
21.本发明的一种动态环境三维形变检测数字散斑干涉系统,为动态环境下三维形变检测提供了一种更加可靠、有效、简洁的测量途径。为解决现有技术难题本发明通过结合具有动态测量能力的dsspi和空间载波技术,实现动态环境三维形变测量,本发明有益效果可概括如下:
22.1、提出了一种将单通道数字散斑干涉(dspi)与双通道数字剪切散斑干涉(dsspi)技术相结合的三维形变检测方法,并运用基准共用和积分运算,使得双光源、单传感器的数
字散斑干涉系统具备了三维形变测量能力,能够实时、同步测量三维形变。
23.2、采用了共光路dsspi和空间载波技术,使得本发明具备很好的抗振动、抗干扰能力,可很好的满足动态环境测量需求;
24.3、通过三个互不共面的灵敏度方向设置,采用频谱分离技术,仅利用单个图像传感器就可实现三个方向形变测量,在很大程度上简化了系统、降低了成本,并且有效避免了多检测通道的数据校准问题;
25.故本发明通过一种动态环境三维形变检测数字散斑干涉系统及检测方法,实现了动态环境下的三维形变测量,这对于科研、工程等领域的实际的工程问题具有重要意义和价值。
附图说明
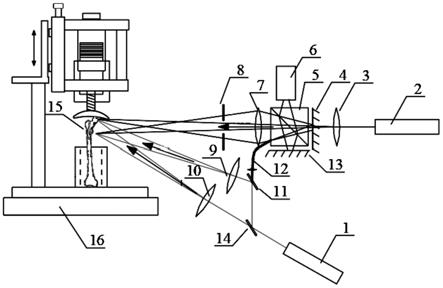
26.图1为本发明实施例的动态环境三维形变检测数字散斑干涉系统的结构示意图;
27.其中,第一激光器1,第二激光器2,第二扩束镜3,反光镜4,半反半透镜5,图像传感器6,成像透镜7,孔径光阑8,第三扩束镜9,第一扩束镜10,第一中性滤光片11,光纤12,可调节反光镜13,第二中性滤光片14,待测样本15,机械加载装置16。
具体实施方式
28.下面根据附图图1,给出本发明的较佳实施例,并予以详细描述,使能更好地理解本发明的功能、特点。
29.请参阅图1,本发明实施例的一种动态环境三维形变检测数字散斑干涉系统,包括一双激光光源、一双通道数字剪切散斑干涉系统、一单通道数字散斑干涉系统、一数据采集系统、一机械加载装置16和一计算机;双激光光源包括一第一激光器1、一第二激光器2、一第一扩束镜10、一第二扩束镜3、一第三扩束镜9、一第一中性滤光片11和一第二中性滤光片14,第一激光器1和第二激光器2的波长不同;双通道数字剪切散斑干涉系统包括一迈克尔逊散斑干涉装置,迈克尔逊散斑干涉装置包括一反光镜4、一半反半透镜5、一成像透镜7、一孔径光阑8和一可调节反光镜13;单通道数字散斑干涉系统与双通道数字剪切散斑干涉系统共用迈克尔逊散斑干涉装置,单通道数字散斑干涉系统包括迈克尔逊散斑干涉装置和一光纤12;数据采集系统包括一图像传感器6,图像传感器6连接计算机;第二激光器2、第二扩束镜3、反光镜4、半反半透镜5、成像透镜7和孔径光阑8依次设置于一第一光路,可调节反光镜13和图像传感器6分别设置于半反半透镜5的两侧;第一激光器1、第二中性滤光片14和第一扩束镜10依次设置于一第二光路;第一中性滤光片11和第二扩束镜3依次设置于一第三光路,光纤12设置于第一中性滤光片11和半反半透镜5之间;机械加载装置16设置于第一光路、第二光路和第三光路的汇聚处。本实施例中,第一激光器1采用红色激光器,第二激光器2采用绿色激光器。
30.双激光光源用于产生待测样本15三维形变检测所需要的检测光源,第一激光器1、第二激光器2投射照明光束分别经第二扩束镜3,第三扩束镜9,第一扩束镜10后照亮待测样本15表面;双通道数字剪切散斑干涉系统用于产生检测所需干涉数据,待测样本15表面反射波前依次经过成像透镜7,孔径光阑8,反光镜4,半反半透镜5,可调节反光镜13后在图像传感器6形成稳定的剪切干涉;单通道数字散斑干涉系统与双通道数字剪切散斑干涉系统
共用迈克尔逊散斑干涉装置,其待测样本15表面反射物光波前,依次经过成像透镜7,孔径光阑8,反光镜4,半反半透镜5,可调节反光镜13后,与光纤12投射的参考光在图像传感器6表面形成稳定干涉;数据采集系统通过图像传感器6获取上述过程所产生的稳定干涉数据;机械加载装置16,用于提供检测过程所需要的位移载荷;图像传感器6由计算机进行数据采集控制;图像传感器6所获取数据经计算机进行相位提取和三维形变计算,最终获得三维形变数据分布。
31.三维形变检测流程为:图像传感器6分别获在加载前、后获取散斑干涉图像i1和i2,对i1和i2进行傅里叶变换(fft),分别获得加载前和加载后的频谱图像f(i1)和f(i2);根据空间频谱的差异性,对形变前、后的固定频谱带进行傅里叶开窗(wift)和复数运算,依次得到形变前、后在三个灵敏度方向上的相位分布信息及进行相位作差,获得三个灵敏度方向上形变和应变所产生的的相位分布图
△
1,
△
2和
△
3;根据三个灵敏度方向上的相位分布,解析出面外形变和两个灵敏度方向上面内、外形变的一阶导数耦合量;选取面外形变作为积分基准,对应变耦合量进行积分运算,最终得到三个灵敏度方向上的形变分布数据。
32.计算机根据频谱差异特性,分别计算图像传感器6采集到的两个剪切散斑图和一个散斑干涉图的相位分布,最后根据相位分布的数据,采用基准共用和积分运算,完成三维形变信息的重构和解析运算。
33.波长不同的第一激光器1和第二激光器2通过第一光路、第二光路和第三光路分别从三个不同方向照亮固定于机械加载装置16上的一待测样本15的表面。
34.相位分布的数据包括两个应变相位分布数据和一个形变相位分布数据,且相位分布的数据通过空间频谱分离技术和空间载波相位提取技术获得。
35.三个相位分布的数据来自互不共面的三个灵敏度方向,并且三个灵敏度方向根据灵敏度检测需求进行调控。
36.通过分别计算一个散斑干涉方向和两个剪切方向的相位分布,并采用基准共用和积分运算,完成三维形变信息的重构和解析运算。
37.在检测过程中,两个波长不同的第一激光器1和第二激光器2产生激光,并照亮待测物体表面,从而通过两个剪切光路和一个散斑干涉光路产生稳定的干涉图像,最终通过图像传感器6的感光元件ccd完成干涉数据的采集,存储于pc端,基于所获得的形变前、后的干涉数据,通过频谱分离技术,可分别计算一个散斑干涉方向的相位分布和两个剪切方向的相位分布数据,最后采用基准共用和积分运算,完成三维形变信息的重构和解析运算。
38.三维形变测量方法,将单通道数字散斑干涉(dspi)与双通道数字剪切散斑干涉(dsspi)技术结合,即一个光学系统内同时包含一个dspi系统和两个光源波长不同的dsspi系统。利用dspi系统波前相位差获取离面方向形变量并将其作为已知参量,再利用两个dsspi系统波前相位差分别获取离面方向和面内方向耦合形变量,通过差值和积分运算,即可分别获得三个灵敏度方向上的形变分布数据。
39.单通道数字散斑干涉系统,物参所对应光强可表示为:
[0040][0041]
u2(x,y)=|u2(x,y)|exp(-2πif
0x
·
x-2πif
0y
·
y)
ꢀꢀꢀ
(1.2)
[0042]
双通道数字剪切散斑干涉系统的在x方向发生剪切,剪切量为δx,则两个不同灵敏度方向上光强可分别表示为:
[0043][0044][0045][0046][0047]
式中,为物光对应波前相位信息,f1、f2是通过剪切角β所引入的载波频率,故f1=(sinβ/λ1),f2=(sinβ/λ2)。
[0048]
数据采集系统,图像传感器6所记录的光强值可表示为:
[0049]
u(x,y)=(u1 u2 u3 u4)
·
(u
1*
u
2*
u
3*
u
4*
) (u5 u6)
·
(u
5*
u
6*
)
ꢀꢀꢀ
(4)
[0050]
将其进行频域变换,可得:
[0051][0052]
其中,表示卷积运算,u1(f
0x
,f
0y
)=ft(u1),u2(f
0x
f1,f
0y
)=ft(u2),u3(f
x
,fy)=ft(u3),u4(f
0x
f1,fy)=ft(u4),u5(f
x
,fy)=ft(u5),u6(f
0x
f2,fy)=ft(u6),。
[0053]
傅里叶变换后其频谱分布包含十一个频谱共20个分项。其中傅里叶变换后其频谱分布包含十一个频谱共20个分项。其中和用以提取面外形变信息,和用以提取形变的一阶导数信息。基于频谱图像,选择相应的频谱区域并利用窗口傅里叶逆变换(wift)的方法,解析出面外形变和全灵敏度方向上面内、外形变的一阶导数耦合量。其对应的相位分布可以利用复振幅运算得到,计算公式如下:
[0054][0055]
[0056][0057][0058][0059][0060]
式中,分别表示形变前骨骼表面相干光束相位分布,分别表示形变前骨骼表面相干光束相位分布,分别表示形变后相位分布,im、re分别表示复数所对应的实部和虚部。在三个灵敏度方向上,由于表面形变所引起的相位差可表示为(n取0,1,2):
[0061][0062]
式中,α表示参考光束入射角度;su为面外形变分布场。
[0063]
双通道数字剪切散斑干涉系统中,面内形变量与相位差的关系可以表示为:
[0064][0065][0066]
其中,δ1、δ2包含面内、外两个灵敏度方向的一阶导数信息,故积分可得:
[0067][0068][0069]
式中,m表示干涉图像所对应的像素数,su,sv,sw分别表示沿u,v,w三个灵敏度方向的应变量,计算式,沿u,v方向的面内形变可表示为:
[0070][0071][0072]
从而最终得到三维形变分布信息。
[0073]
本发明实施例的一种基于本实施例的动态环境三维形变检测数字散斑干涉系统的三维形变检测方法,包括步骤:
[0074]
s1:将一待测样本15安装在机械加载装置16上,设置光学系统参数,并将第一激光器1和第二激光器2分别以非共面空间结构式分别照亮待测样本15;
[0075]
s2:打开第一激光器1和第二激光器2,图像传感器6获取形变前散斑干涉数据i1;
[0076]
s3:机械加载装置16对待测样本15进行位移加载;
[0077]
s4:图像传感器6获取形变后散斑干涉数据i2;
[0078]
s5:对形变前散斑干涉数据i1和形变后散斑干涉数据i2进行数据处理和相位提取,获得对应的第一频域数据fft(i1)和第二频域数据fft(i2);
[0079]
s6:对第一频域数据fft(i1)和第二频域数据fft(i2)进行傅里叶开窗和复数运算,获得三个灵敏度方向上的第一相位分布数据φ1、第二相位分布数据φ2和第三相位分布数据φ3;
[0080]
s7:根据第一相位分布数据φ1、第二相位分布数据φ2和第三相位分布数据φ3,以及基准共用和积分运算,分别计算三个灵敏度方向上的第一形变分布数据u、第二形变分布数据v和第三形变分布数据w;
[0081]
s8:根据第一形变分布数据u、第二形变分布数据v和第三形变分布数据w;以及灵敏度方向,完成世界坐标系下三维形变数据重构。
[0082]
本实施例可采用下列器材:
[0083]
(1)计算机:联想(lenovo)扬天p600,处理器英特尔酷睿i5,硬盘容量240gb/256gb ssd 1tb,显卡gtx1650s,内存容量16gb,支持rgb 24bit接口及tvout视频输出;
[0084]
(2)显示器:品牌aoc,27英寸,4k高清,ips hdr,type-c接口,功率90w,型号u27n3c;
[0085]
(3)第一激光器1:波长632nm,200mw固体激光器,单纵模;
[0086]
(4)第二激光器2:波长532nm,200mw固体激光器,单纵模;
[0087]
(5)第一扩束镜10:焦距16mm,通光孔径20.4mm;
[0088]
(6)第二扩束镜3:焦距16mm,通光孔径20.4mm;
[0089]
(6)第三扩束镜9:焦距16mm,通光孔径20.4mm;
[0090]
(7)孔径光阑8:电动可调孔径光阑hgemd52,孔径变化3-52mm;
[0091]
(8)图像传感器6:采用巴斯勒aca2400-50gm面阵ccd,2048*1536像素,成像区域大小为3626μmx2709μm,像素大小为1.75μmx1.75μm,最高速度可达50帧每秒;
[0092]
(9)成像透镜7:品牌大恒,φ25.4k9双凸透镜,f=100mm,通光孔径:90%;
[0093]
(10)半反半透镜5:大恒,gcc-4011系列宽带分光棱镜,透射率/反射率:50/50;材
料k9;外形尺寸:25.4mm*25.4mm*25.4mm;
[0094]
(11)反光镜4:材料精退火k9光学玻璃,直径φ25.4mm,平行差<3弧分,厚度偏差
±
0.2mm;
[0095]
(11)光纤12:自制,含自聚焦透镜,附加损耗≤0.1db,连接头类型fc/apc or fc/pc。
[0096]
以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。