1.本发明涉及一种控制装置,具体涉及一种雾炮机在物联网中对粉尘闭环控制及视频联动的应用,属于自动化控制领域。
背景技术:
2.目前,各地先后完成了大气污染颗粒物源解析工作,研究结果表明,扬尘、机动车、工业生产和燃煤是当前我国大部分城市环境空气中颗粒物的主要污染源,约占85%-90%。其中南京的首要污染来源是扬尘,在空气中pm10(可吸入颗粒物)和pm2.5(细颗粒物)所占比重都高居榜首。
技术实现要素:
3.本发明正是针对现有技术中存在的问题,提供一种雾炮机在物联网中对粉尘闭环控制及视频联动的应用,该技术方案减轻了操作人员工作压力,大大提升了生产效率,有效的改善了料场的环境。
4.为了实现上述目的,本发明的技术方案如下,一种雾炮机在物联网中对粉尘闭环控制及视频联动的应用方法,其特征在于,实现本方法软件包括factory talk view、logix5000开发软件,rslinx,kepserver,opc、视频管理平台、数据库;设备包括plc控制器、大气分析仪、雾炮机、激光透雾云台摄像机、硬盘录像机、大屏以及服务器,将大气分析仪、雾炮机、激光透雾云台摄像机、plc、视屏管理平台、大屏、服务器设备组成一个物联局域网,通过上述软件实现“监测-分析-处理-监测”全自动闭环模式控制。
5.作为本发明的一种改进,环保plc控制器对料场大气分析仪数据实时采集(pm2.5、pm10、 tsp、温度、湿度、风力、气压、风向),其算法分为一级、二级控制。
6.二级:根据大气五项因子(温度、湿度、风力、气压、风向)计算起尘的概率,提前启动料场4台雾炮机工作(采用左右、上下循环工作法),将起尘趋势扼杀。一级:根据某位置大气分析仪的数据,来决定其附近2台雾炮机是否工作,如出现pm2.5、pm10、tsp任一数值超过限幅时,通过plc算法模型启动附近2台雾炮机(旋转编码器)转至粉尘仪方向,进行上下、左右15
°
喷射细雾,直至粉尘含量下降正常范围;同时plc控制器将信号点通过opc 驱动送至kepserver,视频管理平台再从kepserver中读取此信号,驱动激光云台摄像机左右巡视,通过粉尘图像和激光透过率识别系统,基于matlab图像灰度值分析,迅速定位粉尘浓度大的区域,再通过视频管理平台触发联动模块,实现大屏弹窗、文本闪烁等提示。
7.作为本发明的一种改进,将大气分析仪、雾炮机、plc、hmi等设备组成l1生产网,将激光摄像机、视屏管理平台、大屏、客户端、图像识别等设备组成视频网,通过kepserver 中opc驱动读取plc数据,实现系统间数据透明传输。
8.作为本发明的一种改进,所述视频管理平台主要分为以下八个部分:视频播放,视频解码,设备管理,录像回放,数据采集,图像识别、云台控制以及大屏联动,各部分因信令交互构成一套有机整体,在网络上合理部署服务模块,优化信令(数据流)流程,使监控系统
更好地运作,整体效能得以最大限度地发挥。
9.作为本发明的一种改进,还包括用于处理数据与视频逻辑管理系统,视频管理平台通过 kepserver opc驱动获取相应数据,通过程序判读数据是否变化,将变化信号传输给联动模块,控制云台巡视,再根据粉尘图像和激光透过率识别系统,基于matlab图像灰度值分析 (技术机密,不做详细描述),分析粉尘的厚度,判断起尘区域,再控制解码模块来控制大屏幕显示。并在监控平台产生一系列的联动功能,比如:大屏弹窗、文字闪烁等提示作为本发明的一种改进,喷枪上刻有标识插入深度的刻度值,刻在喷枪和压环装配处。
10.相对于现有技术,本发明具有如下优点,1)通过该方法,操作员无须值守终端前控制雾炮机、摄像机等设备,现只需关注hmi画面报警即可。当料场区域某处粉尘含量(pm2.5、 pm10、tsp等)超标时,plc会根据算法模型迅速定位该区域,同时触发信号给区域内的雾炮机,令其转动至某角度后喷射细雾降尘;同时,附近的摄像机会接收到plc的信号进行转动扫描,通过粉尘图像和激光透过率识别系统,基于matlab图像灰度值分析,迅速定位粉尘浓度大的区域,实现大屏弹窗、文本闪烁等提示。通过粉尘仪实时数据反馈来决定雾炮工作时间,如果数据一直居高不下,plc会再启动其他雾炮机转向此角度,进行喷射,直至粉尘含量下降至正常范围内;2)本控制模式系统主要包含plc控制系统、大气在线分析系统、雾炮机降尘系统、视频联动系统、图像识别系统等,达到闭环控制粉尘的目的,通过“快、准、狠”方式,迅速优化料场环境。plc控制站24小时不间断分析整个料场的大气数据,根据算法模型,判断出某区域粉尘含量是否超标,如有异常,启动其附近的2台雾炮机旋转(带旋转编码器)转至此方向,进行喷射。同时plc会触发信号给视频管理平台,驱动“鹰眼”激光云台摄像机左右巡视,通过粉尘图像和激光透过率识别系统,基于matlab图像灰度值分析,迅速定位粉尘浓度大的区域,从而实现大屏弹窗、文字闪烁等提示,供操作员确认及处理;3) 通过闭环控制,减轻了操作人员工作压力,大大提升了生产效率,有效的改变了料场的环境,最终实现了大气分析仪与抑尘器以及监控联动的闭环控制应用。
附图说明
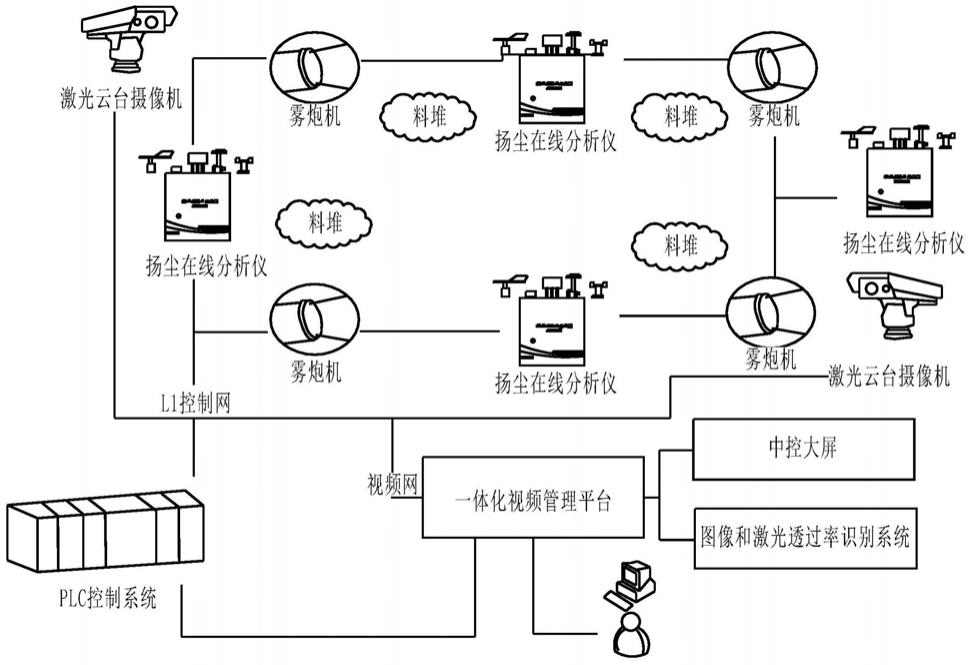
11.图1为本发明的控制系统网络图;
12.图2为本发明的控制流程图;
13.图3为本发明视频管理平台功能画面图。
具体实施方式:
14.为了加深对本发明的理解,下面结合附图对本实施例做详细的说明。
15.实施例1:参见图1,一种雾炮机在物联网中对粉尘闭环控制及视频联动的应用,如图1 所示,将大气分析仪、雾炮机、plc、hmi等设备组成l1生产网,将激光摄像机、视屏管理平台、大屏、客户端、图像识别等设备组成视频网。通过kepserver中opc驱动读取plc数据,实现系统间数据透明传输。首先将4台大气分析仪报警点对应的变量名wp写进plc以及视频管理平台里,使分析仪、雾炮机、plc、激光摄像机、视频管理平台等设备之间通讯保持通畅,变量wp默认值为0,刷新频率为500毫秒。大气分析仪送出粉尘超标数据到plc使变量为1,通过plc算法模型启动附近2台雾炮机(旋转编码器)转至粉尘仪方向,进行上下、左右15
°
喷射细雾,直至粉尘含量下降正常范围。同时视频管理平台从kepserver中读取变量wp从0变为1
时,驱动激光云台摄像机云台左右巡视,通过粉尘图像和激光透过率识别系统,基于matlab图像灰度值分析,反馈给平台一信号,来停止云台的转动,从而定位粉尘浓度大的区域,再驱动联动模块在大屏幕上弹出画面窗口,再加上文本编辑等功能,可实现屏幕边框闪烁、文本提示,如:“料场北粉尘高,请注意”文本显示、闪烁等,提醒操作员注意并确认,最终实现“监测-分析-处理-监测”全自动闭环模式控制。
16.如图2所示,如出现pm2.5、pm10、tsp任一数值超过限幅时,通过plc算法模型启动附近2台雾炮机(旋转编码器)转至粉尘仪方向,进行上下、左右15
°
喷射细雾,直至粉尘含量下降正常范围。同时plc控制器将信号点通过opc驱动送至kepserver,视频管理平台再从kepserver中读取此信号,驱动激光云台摄像机左右巡视,通过粉尘图像和激光透过率识别系统,基于matlab图像灰度值分析,迅速定位粉尘浓度大的区域。再通过视频管理平台触发联动模块,实现大屏弹窗、文本闪烁等提示。
17.如图3所示,视频管理平台主要分为以下八个部分:视频播放,视频解码,设备管理,录像回放,数据采集,图像识别、云台控制、大屏联动。视频播放:主要是调取硬盘录像里各视频图像,并呈现在大屏窗口中。
18.视频解码:对现场摄像机编码设备进行解码,现场设备在网络接入上采用压缩方式传输,编码后往往数据量很大,须经解码后达到高清效果,能看清整个料场的情况。
19.设备管理:设备管理模块是对料场所有摄像机进行管理,包括设备状态、网络带宽占用率、图像流畅、清晰度等,起到设备、网络故障预警、合理分配带宽资源的作用。
20.录像回放:通过硬盘录像机将所有料场所有视频信号集中存储、管理,进行24小时录像、存储,存储时间可达30天。在平台里可调取30天内任意摄像机的录像,查看现场的状况。
21.数据采集:负责采集plc、粉尘图像和激光透过率识别系统的数据,提供给过程数据库,建立数据库,如有变量变化,直接在中控大屏弹窗预警或控制云台的移动。
22.云台控制:通过平台来控制现场摄像机的转动(驱动云台里的小电机工作),达到巡视的作用。
23.大屏联动:是读取plc信号自动触发已配置好的动作项,如:触发视频模块在大屏上显示、文本显示、边框闪烁等。
24.各部分因信令交互构成一套有机整体,在网络上合理部署服务模块,优化信令(数据流) 流程,使监控系统更好地运作,整体效能得以最大限度地发挥。
25.本发明还包括用于处理数据与视频逻辑管理系统。视频管理平台通过kepserver opc驱动获取相应数据,通过程序判读数据是否变化,将变化信号传输给联动模块,控制云台巡视,再根据粉尘图像和激光透过率识别系统,基于matlab图像灰度值分析(技术机密,不做详细描述),分析粉尘的厚度,判断起尘区域,再控制解码模块来控制大屏幕显示。并在监控平台产生一系列的联动功能,比如:大屏弹窗、文字闪烁等提示。
26.本发明为研究一种雾炮机在物联网中对粉尘闭环控制及视频联动的应用方法。实现本方法软件包括factory talk view、logix5000开发软件,rslinx,kepserver,opc、视频管理平台、数据库等;设备包括plc控制器、大气分析仪、雾炮机、激光透雾云台摄像机、硬盘录像机、大屏、服务器等。将大气分析仪、雾炮机、激光透雾云台摄像机、plc、视屏管理平台、大屏、服务器等设备组成一个物联局域网,通过上述软件实现“监测-分析-处理-监测”全自
动闭环模式控制。
27.环保plc控制器对料场大气分析仪数据实时采集(pm2.5、pm10、tsp、温度、湿度、风力、气压、风向),其算法分为一级、二级控制。二级:根据大气五项因子(温度、湿度、风力、气压、风向)计算起尘的概率,提前启动料场4台雾炮机工作(采用左右、上下循环工作法),将起尘趋势扼杀。一级:根据某位置大气分析仪的数据,来决定其附近2台雾炮机是否工作,如出现pm2.5、pm10、tsp任一数值超过限幅时,通过plc算法模型启动附近2台雾炮机(旋转编码器)转至粉尘仪方向,进行上下、左右15
°
喷射细雾,直至粉尘含量下降正常范围。同时plc控制器将信号点通过opc驱动送至kepserver,视频管理平台再从kepserver 中读取此信号,驱动激光云台摄像机左右巡视,通过粉尘图像和激光透过率识别系统,基于 matlab图像灰度值分析,迅速定位粉尘浓度大的区域。再通过视频管理平台触发联动模块,实现大屏弹窗、文本闪烁等提示。
28.通过此发明减轻了操作人员工作压力,大大提升了生产效率,有效的改善了料场的环境。
29.需要说明的是上述实施例,并非用来限定本发明的保护范围,在上述技术方案的基础上所作出的等同变换或替代均落入本发明权利要求所保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。